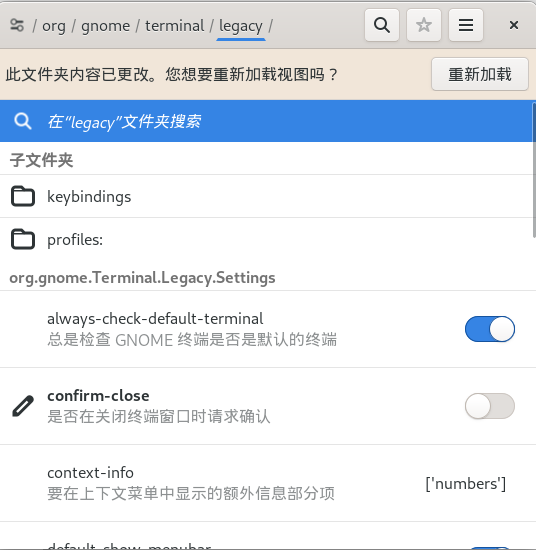
关于ABB机器人安全区域设定,需要开通608-1功能选项,才可以使用


也可以在系统信息-选项查看



关于范围设置最好设置局部,不然设置全局其他地方会占用,后续处理故障麻烦

储存类型设置常量,应为区域是固定值


关于pos1和pos2的数值需要将机器人的位置输入,手动操纵查看机器人需要设置的位置,最高点和最低点,类似发那科机器人防止干涉区,以对角点设置安全区域


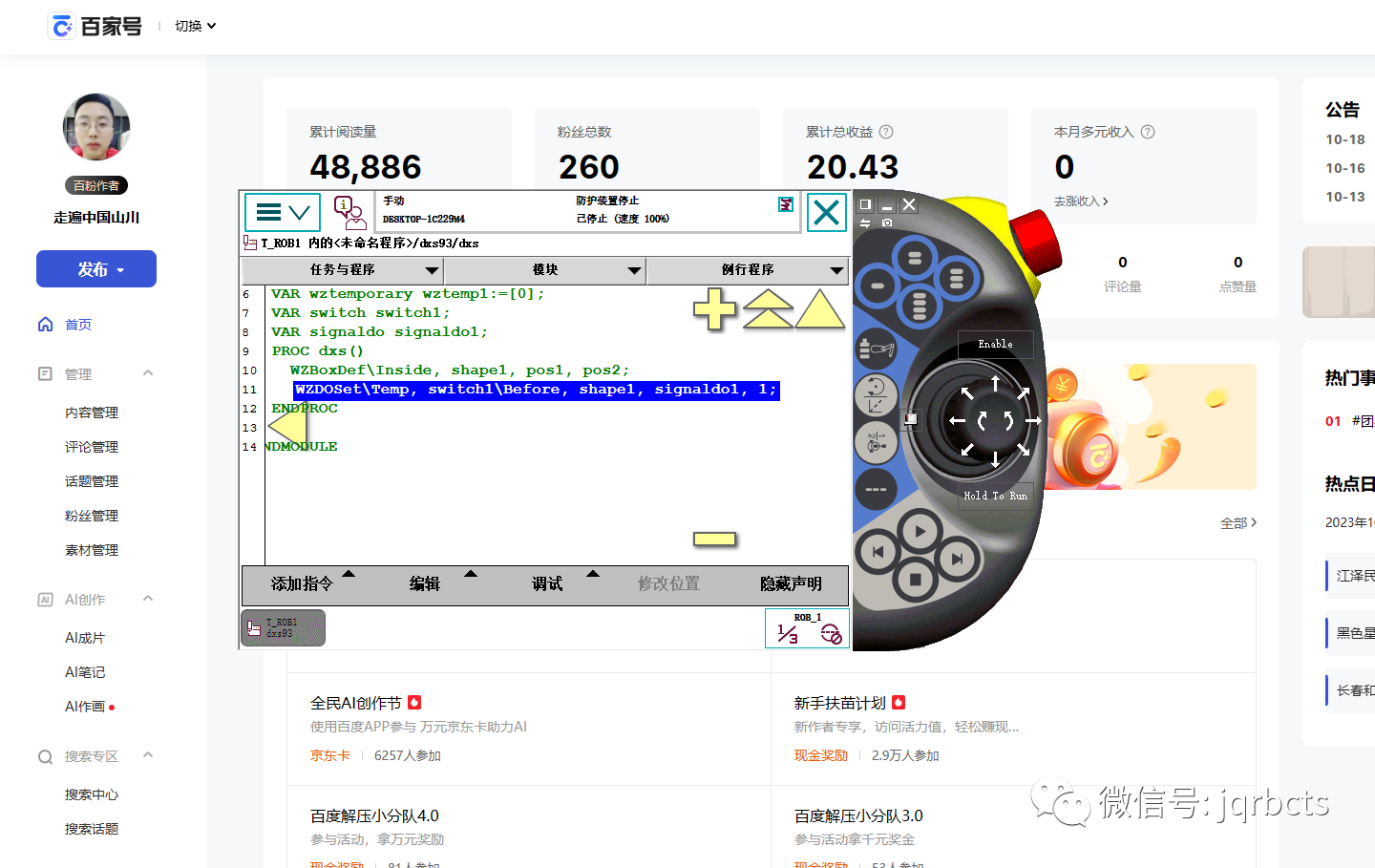
机器人进入设置好的安全区域,在内测会do1会为on
关于ABB机器人安全区域设定,需要开通608-1功能选项,才可以使用
也可以在系统信息-选项查看
关于范围设置最好设置局部,不然设置全局其他地方会占用,后续处理故障麻烦
储存类型设置常量,应为区域是固定值
关于pos1和pos2的数值需要将机器人的位置输入,手动操纵查看机器人需要设置的位置,最高点和最低点,类似发那科机器人防止干涉区,以对角点设置安全区域
机器人进入设置好的安全区域,在内测会do1会为on
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1108413.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!











![[尚硅谷React笔记]——第4章 React ajax](https://img-blog.csdnimg.cn/be694703390e477ba20f3e405bb74ca0.png)