1.NV21格式图片解析
NV21图像格式属于 YUV颜色空间中的YUV420SP格式
每四个Y分量共用一组U分量和V分量,Y连续排序,U与V交叉排序

重点总结
- uv交错模式
- 4Y共用一组uv(2个)
- 大小:UV= Y 的一半
排列方式如下
Y Y Y Y Y Y Y Y
Y Y Y Y Y Y Y YY Y Y Y Y Y Y Y
Y Y Y Y Y Y Y YV U V U V U V U
V U V U V U V U
2.RGB图片转NV21—逐像素
基本公式
-
yuv --> rgb
R = (298*Y + 411 * V - 57344)>>8 G = (298*Y - 101* U - 211* V+ 34739)>>8 B = (298*Y + 519* U- 71117)>>8 -
rgb --> yuv
Y= ( 66*R + 129*G + 25*B)>>8 + 16 U= (-38*R - 74*G + 112*B)>>8 +128 V= (112*R - 94*G - 18*B)>>8 + 128
c++代码
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#include <vector>
#include <fstream>
#include <string>
void RGB2NV21()
{
const char *filename = "yuv.yuv";
cv::Mat Img = cv::imread("RGB.jpg");
FILE *fp = fopen(filename,"wb");
if (Img.empty())
{
std::cout << "empty!check your image";
return;
}
int cols = Img.cols;
int rows = Img.rows;
int Yindex = 0;
int UVindex = rows * cols;
unsigned char* yuvbuff = new unsigned char[1.5 * rows * cols];
cv::Mat NV21(rows+rows/2, cols, CV_8UC1);
cv::Mat OpencvYUV;
cv::Mat OpencvImg;
cv::cvtColor(Img, OpencvYUV, CV_BGR2YUV_YV12);
int UVRow{ 0 };
for (int i=0;i<rows;i++)
{
for (int j=0;j<cols;j++)
{
uchar* YPointer = NV21.ptr<uchar>(i);
int B = Img.at<cv::Vec3b>(i, j)[0];
int G = Img.at<cv::Vec3b>(i, j)[1];
int R = Img.at<cv::Vec3b>(i, j)[2];
//计算Y的值
int Y = (77 * R + 150 * G + 29 * B) >> 8;
YPointer[j] = Y;
yuvbuff[Yindex++] = (Y < 0) ? 0 : ((Y > 255) ? 255 : Y);
uchar* UVPointer = NV21.ptr<uchar>(rows+i/2);
//计算U、V的值,进行2x2的采样
if (i%2==0&&(j)%2==0)
{
int U = ((-44 * R - 87 * G + 131 * B) >> 8) + 128;
int V = ((131 * R - 110 * G - 21 * B) >> 8) + 128;
UVPointer[j] = V;
UVPointer[j+1] = U;
yuvbuff[UVindex++] = (V < 0) ? 0 : ((V > 255) ? 255 : V);
yuvbuff[UVindex++] = (U < 0) ? 0 : ((U > 255) ? 255 : U);
}
}
}
for (int i=0;i< 1.5 * rows * cols;i++)
{
fwrite(&yuvbuff[i], 1, 1, fp);
}
fclose(fp);
std::cout << "write to file ok!" << std::endl;
std::cout << "srcImg: " << "rows:" << Img.rows << "cols:" << Img.cols << std::endl;
std::cout << "NV21: " << "rows:" << NV21.rows << "cols:" << NV21.cols << std::endl;
std::cout << "opencv_YUV: " << "rows:" << OpencvYUV.rows << "cols:" << OpencvYUV.cols << std::endl;
cv::imshow("src", Img);//原图
cv::imshow("YUV", NV21);//转换后的图片
cv::imshow("opencv_YUV", OpencvYUV); //opencv转换后的图片
cv::imwrite("NV21.jpg", NV21);
cv::waitKey(30000);
}
int main()
{
RGB2NV21();
return 0;
}
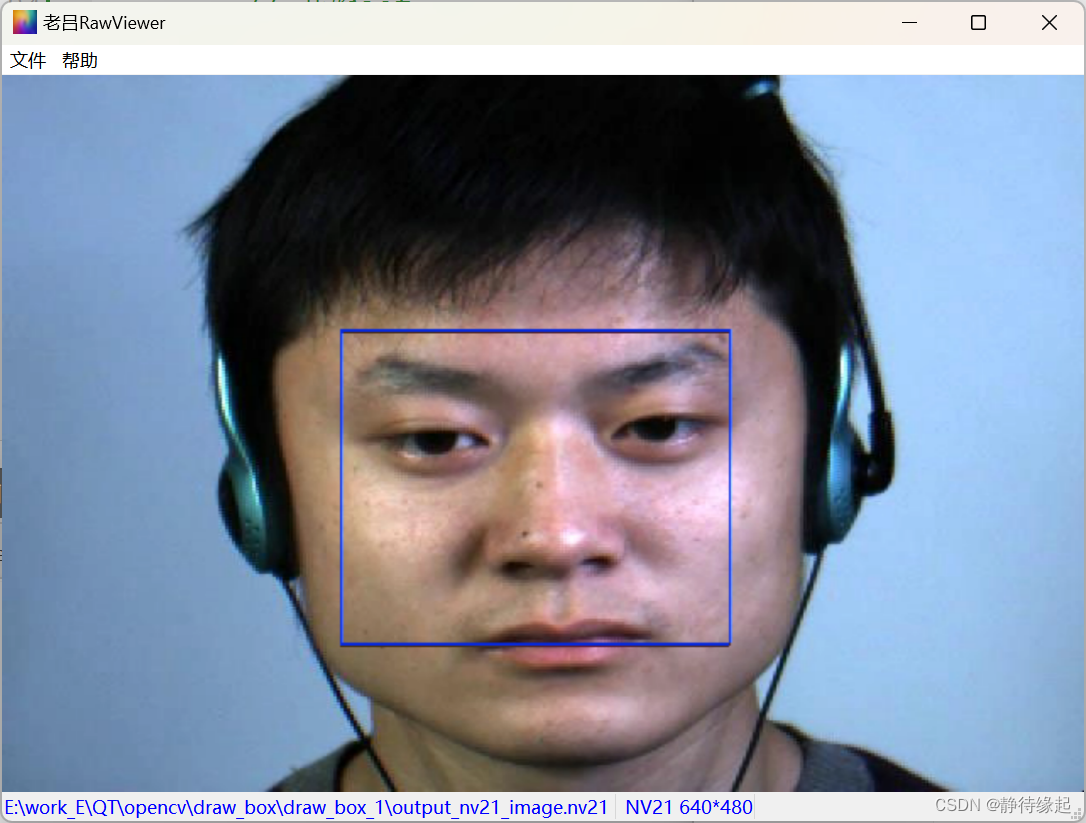
3.NV21图像逐个像素画框
结果展示
整体流程
将原始图像保存到一维数组
2个水平画线
2个竖直画线
主要难点就是找2个uv起始坐标的迭代公式
水平画线
y :外循环更新下一行,内循环改变一行值
uv:外循环更新下一行,内循环改变一行值
因为交错模式,uv内循环更新要隔着2个
因为4个y对应一组uv,uv外循环次数比y外循环次数少一半
Y分量起始位置更新公式
//计算Y分量在nv21Data数组中的起始位置:Y的数据+绘制横坐标位置
yStartIndex = (y+i_r) * imageWidth + x;
yStartIndex:Y分量在nv21Data数组中的起始位置
i_r:行更新值
imageWidth:图像宽
x:绘制起始点的横坐标位置
UV分量起始位置更新公式
// 计算UV分量在nv21Data数组中的起始位置:Y的数据+(UV数据行/2*数据宽度)+绘制横坐标(列)位置
uvStartIndex = imageWidth * imageHeight + ((y+i_r)/ 2 * imageWidth) + x ;
uvStartIndex:uv分量在nv21Data数组中的起始位置
i_r:行更新值
imageWidth:图像宽
imageHeight:图像高
x:绘制起始点的横坐标位置
竖直画线
y :外循环更新下一列,内循环改变一列值-间隔mageWidth渲染
uv:外循环更新下一列,内循环改变一列值
因为交错模式,uv外循环更新+2
因为4个y对应一组uv,uv内循环次数比y内循环次数少一半
Y分量起始位置更新公式
// 计算Y分量在nv21Data数组中的起始位置:Y的数据+绘制横坐标位置
yStartIndex = (y) * imageWidth + x+i_c;
yStartIndex:Y分量在nv21Data数组中的起始位置
i_c:列更新值
imageWidth:图像宽
x:绘制起始点的横坐标位置
UV分量起始位置更新公式
// 计算UV分量在nv21Data数组中的起始位置:Y的数据+(UV数据行/2*数据宽度)+绘制列位置
uvStartIndex = imageWidth * imageHeight + (y/2 * imageWidth) + x+(i_c);
uvStartIndex:uv分量在nv21Data数组中的起始位置
i_c:列更新值
imageWidth:图像宽
imageHeight:图像高
x:绘制起始点的横坐标位置
完整代码
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
/**
* 水平画线
* y :外循环更新下一行,内循环改变一行值
* uv:外循环更新下一行,内循环改变一行值
* 因为交错模式,uv内循环更新要隔着2个
* 因为4个y对应一组uv,uv外循环次数比y外循环次数少一半
*
* 参数:
* unsigned char *nv21Data,int imageWidth, int imageHeight:图像的数据和宽高
* int x:线条起始点的横坐标
* int y:线条起始点的纵坐标
* int line_len:线条的长度
*/
void draw_line_Horizontal(unsigned char *nv21Data,int imageWidth, int imageHeight,int x,int y,int line_len){
//参数判断
if(nv21Data==NULL || x>imageWidth || y>imageHeight||line_len>imageWidth){
return;
}
int line_width = 3;//设置画线的宽度为3
int y_width = line_width;//改变Y的宽度
// 4个y共用一组vu,渲染的时候要/2+1
int uv_width = y_width/2 + 1; //设置改变UV的宽度为 Y/2+1
int yStartIndex, uvStartIndex;//定义起始位置
// 设置Y分量
for(int i_r=0;i_r<y_width;i_r++){//i_r表示行更新值
// 计算Y分量在nv21Data数组中的起始位置:Y的数据+绘制横坐标位置
yStartIndex = (y+i_r) * imageWidth + x;
// 开始set
for (int i = 0; i < line_len; i++) {
// 设置Y分量为蓝色
nv21Data[yStartIndex + i] = 60;
}
}
// 设置UV分量
for(int i_r=0;i_r<uv_width;i_r++){//更新行位置
// 计算UV分量在nv21Data数组中的起始位置:Y的数据+(UV数据行/2*数据宽度)+绘制横坐标(列)位置
uvStartIndex = imageWidth * imageHeight + ((y+i_r)/ 2 * imageWidth) + x ;
// 开始set
for (int i = 0; i < line_len; i+=2) {
// 设置UV分量为蓝色:因为UV交错分布,故+2
nv21Data[uvStartIndex + i] = 100;
nv21Data[uvStartIndex + i + 1] = 212;
}
}
}
/**
* 竖直画线
* 间隔一个imageWidth渲染
* y :外循环更新下一列,内循环改变一列值
* uv:外循环更新下一列,内循环改变一列值
* 因为交错模式,uv外循环更新+2
* 因为4个y对应一组uv,uv内循环次数比y内循环次数少一半
*
* 参数:
* unsigned char *nv21Data,int imageWidth, int imageHeight:图像的数据和宽高
* int x:线条起始点的横坐标
* int y:线条起始点的纵坐标
* int line_len:线条的长度
*/
void draw_line_Vertical(unsigned char *nv21Data,int imageWidth, int imageHeight,int x,int y,int line_len){
//参数判断
if(nv21Data==NULL || x>imageWidth || y>imageHeight||line_len>imageWidth){
return;
}
int line_width = 3;//设置画线的宽度为3
int y_width = line_width;//改变Y的宽度
// 4个y共用一组vu,渲染的时候要/2+1
int uv_width = y_width/2+1; //设置改变UV的宽度为 Y
int yStartIndex, uvStartIndex;//定义起始位置
// 设置Y分量
for(int i_c=0;i_c<y_width;i_c++){
// 计算Y分量在nv21Data数组中的起始位置:Y的数据+绘制横坐标位置
yStartIndex = (y+i_c) * imageWidth + x;
// 开始set
for (int i = 0; i < line_len; i++) {
// 设置Y分量为蓝色
int index_y = yStartIndex + imageWidth*i;
nv21Data[index_y] = 65;
}
}
// 设置UV分量
for(int i_c=0;i_c<uv_width;i_c+=2){//外循环更新的时候因为交错模式=每次更新列位置+2
// 计算UV分量在nv21Data数组中的起始位置:Y的数据+(UV数据行/2*数据宽度)+绘制列位置
uvStartIndex = imageWidth * imageHeight + (y/2 * imageWidth) + x+(i_c);
// 开始set:
// 因为竖直方向 uv是y的一半,所以line_len/2
// 又因为竖直方向内循环没有交错模式影响,不用跳过2
for (int i = 0; i < line_len/2; i++) {
int index_u = uvStartIndex + imageWidth*i;//下一行index:间隔imageWidth*i
int index_v = uvStartIndex + imageWidth*i+1;
nv21Data[index_u] = 100;
nv21Data[index_v] = 212;
}
}
}
void drawRectOnNv21Image(const char *pImagePath, int imageWidth, int imageHeight, int left, int top, int right, int bottom) {
/*
参数检测
*/
if(pImagePath==NULL || imageHeight==0 || imageWidth==0){
printf("Error: Failed parameter\n");
return;
}
/*
程序运行主体
*/
FILE *file = fopen(pImagePath, "rb");
if (file == NULL) {
printf("Error: Failed fopen pImagePath\n");
return;
}
// 计算NV21图片的总大小
int imageSize = imageWidth * imageHeight * 3 / 2;
fseek(file, 0, SEEK_END);
int file_size = ftell(file);
fseek(file, 0, SEEK_SET);
// 判断文件是否为NV21格式:file_size!=imageSize
if(file_size!=imageSize){
printf("Error: Failed imageSize!=1.5 * imageWidth * imageHeight \n");
fclose(file);
return;
}
// 申请空间存储图片yuv数据
unsigned char *nv21Data = (unsigned char *)malloc(imageSize);
if (nv21Data == NULL) {
printf("Error: Failed malloc\n");
fclose(file);
return;
}
// 读取NV21图片数据
fread(nv21Data, sizeof(unsigned char), imageSize, file);
fclose(file);
// 画矩形框
int rectWidth = right - left;
int rectHeight = bottom - top;
// 上边框
draw_line_Horizontal(nv21Data,imageWidth,imageHeight,left,top,rectWidth);
// 下边框
draw_line_Horizontal(nv21Data,imageWidth,imageHeight,left,bottom,rectWidth);
// 左边框
draw_line_Vertical(nv21Data,imageWidth,imageHeight,left,top,rectHeight);
// 右边框
draw_line_Vertical(nv21Data,imageWidth,imageHeight,right,top,rectHeight);
// 保存结果为新的NV21图片
char output_image_path[] = "output_nv21_image.nv21";
FILE *outputFile = fopen(output_image_path, "wb");
if (outputFile == NULL) {
printf("Error: Failed fopen output_image_path\n");
free(nv21Data);
return;
}
fwrite(nv21Data, sizeof(unsigned char), imageSize, outputFile);
fclose(outputFile);
free(nv21Data);
printf("Program ok!\n");
printf("Output image save path:%s\n",output_image_path);
}
int main() {
const char *pImagePath = "input_nv21_iamge.nv21"; // NV21图片文件路径
int imageWidth = 640; // 图片宽度
int imageHeight = 480; // 图片高度
int left = 200; // 矩形框左上角x坐标
int top = 170; // 矩形框左上角y坐标
int right = 430; // 矩形框右下角x坐标
int bottom = 380; // 矩形框右下角y坐标
drawRectOnNv21Image(pImagePath, imageWidth, imageHeight, left, top, right, bottom);
return 0;
}