文章目录
- 强化学习概念
- Model-Free
- Value-based learning
- DQN
- State-based learning
- 蒙特卡洛近似
- Actor-Critic Learning
- Model-Based
- Monte Carlo TreeSearch(MCTS)-AlphaGo
强化学习概念
- Terminologies(术语)
- State s:环境的一个状态
- Agent :代理
- Action a:动作
- Environment:代理外的其他东西
- Reward r:反馈,代理从环境中收到的数值
- Policies π(a|s):策略是代理根据state来决定action
- State transition p(s’|s,a):状态转移函数
- Trajectory:序列是代理和环境交互过程中的一系列状态和动作组成
- Return and Value
- Return:回报,衡量当前时刻局势的好坏,未来的回报没当前汇报重要
U t = R t + γ R t + 1 + γ 2 R t + 2 + … U_t = R_t + \gamma R_{t+1} + \gamma^2 R_{t+2} + \ldots Ut=Rt+γRt+1+γ2Rt+2+… - Action-Value Function:近似Ut,依据动作
Q π ( s t , a t ) = E [ U t ∣ s t , a t ] Q_\pi(s_t, a_t) = \mathbb{E} [U_t | s_t, a_t] Qπ(st,at)=E[Ut∣st,at] - Optimal action-value function:
Q ∗ ( s t , a t ) = max Q π ( s t , a t ) Q^*(s_t, a_t) = \max Q_\pi(s_t, a_t) Q∗(st,at)=maxQπ(st,at) - State-Value Function:近似Ut,依据策略
V π ( s t ) = E A [ Q π ( s t , A ) ] V_\pi(s_t) = \mathbb{E}_A[Q_\pi(s_t, A)] Vπ(st)=EA[Qπ(st,A)]
- Return:回报,衡量当前时刻局势的好坏,未来的回报没当前汇报重要
- Value-based learning.对选择的动作进行评分
- Deep Q network (DQN) for approximating Q*(s, a).
- Learn the network parameters using temporal different (TD).
- Policy-based learning.计算选择某动作的概率
- Policy network for approximating π(a | s).
- Learn the network parameters using policy gradient.
- Actor-critic method. (Policy network value network.
Example: AlphaGo
Model-Free
Value-based learning
DQN
- 目标:最大化return
- 问题:如果我们知道价值函数Q*,什么是最好的action?
- 挑战:Q*是什么?
- 使用神经网络Q去近似Q*
- 时间差分学习(temporal-difference learning)
Definition: Optimal action-value function.
- Q*(st, at) = maxπE[Ut|St = st, At = at].
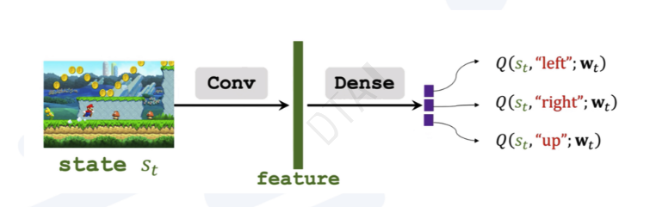
- DQN: Approximate Q*(s, a)using a neural network (DQN).
- Q(s, a; w)is a neural network parameterized by w.
- Input: observed state s.
- Output: scores for every actien a ∈ A.
Step1:观察状态St和动作At。
Step2:预测值函数:V(St, At) = f(St, At; w),其中f是具有参数w的值网络。
Step3:对值网络进行微分:∇w V(St, At) = ∇w f(St, At; w)。
Step4:环境提供新的状态St+1和奖励Rt。
Step5:计算TD目标:Yt = Rt + γ * maxa Q(St+1, a; w),其中γ是折扣因子,Q是动作值函数。
Step6:执行梯度下降来更新参数:w’ = w - α * (V(St, At) - Yt) * ∇w f(St, At; w),其中α是学习率。
Step7:更新值网络的参数:w = w’。
State-based learning
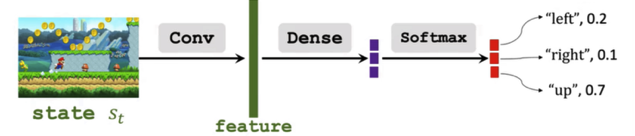
策略函数π(a | s)是一个概率密度函数,它接受一个状态(state)作为输入,并输出代理(agent)可以采取所有动作(action)的概率。例如:
π(left | s) = 0.2
π(right | s) = 0.1
π(up | s) = 0.7
类似于基于价值的学习,我们可以使用神经网络来近似这个策略函数。
使用策略网络(π(a | s; θ))来逼近策略函数π(a | s)。
θ表示神经网络的可训练参数。
步骤:
-
Algorithm: Policy Gradient with Approximate Policy Gradient Theorem
- Step1:Observe the state st.
- Step2:Randomly sample action at according to the policy network π(at | st; θ).
- Step3:Compute the estimated action-value Q(st, at).
- Step4:Differentiate the policy network: ∇θ π(at | st; θ).
- Step5:Compute the (approximate) policy gradient: g(at, θ) = Q(st, at) * ∇θ π(at | st; θ).
- Step6:Update the policy network parameters: θ’ = θ + β * g(at, θ).
-
算法:使用近似策略梯度定理的策略梯度方法
- Step1:观察状态st。
- Step2:根据策略网络π(at | st; θ)随机采样动作at。
- Step3:计算估计的动作值Q(st, at)。
- Step4:对策略网络进行微分:∇θ π(at | st; θ)。
- Step5:计算(近似)策略梯度:g(at, θ) = Q(st, at) * ∇θ π(at | st; θ)。
- Step6:更新策略网络的参数:θ’ = θ + β * g(at, θ)。
蒙特卡洛近似
- 利用大数定理,来做期望的近似
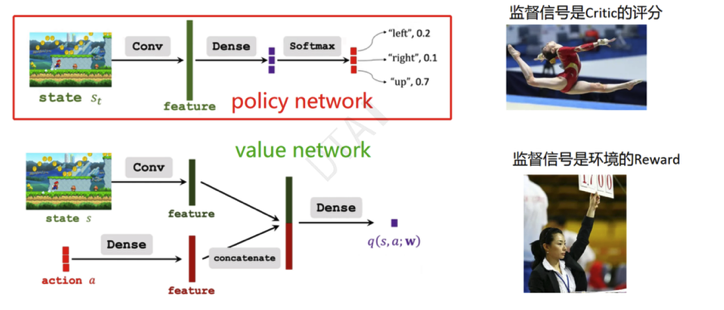
Actor-Critic Learning
- 目标函数还是状态价值函数(状态的期望),不过值(演员)和概率(评论家)都需要用神经网络去拟合
- 步骤:
- Step1:观察状态 st。
- Step2:根据策略 r(·, st; θ) 随机采样动作 at。
- Step3:执行动作 at,并观察新的状态 st+1 和奖励 rt。
- Step4:使用时序差分(Temporal Difference, TD)更新值网络(value network)的参数 w。
- Step5:使用策略梯度(policy gradient)更新策略网络(policy network)的参数 θ。
Model-Based
- AlphaGo Zero 使用191917的张量表示一个状态,8个矩阵是白子的格局,8个矩阵是黑子的格局,1个矩阵代表如果该落黑子,表示全部元素等于1,如果该落白子,该矩阵全部元素等于0。


Monte Carlo TreeSearch(MCTS)-AlphaGo
-
假设此时已经训练好了策略网络T(a l s;θ)和价值网络v(s;w)。 AlphaGo真正跟人下棋的时候,做决策的不是策略网络或者价值网络,而是蒙特卡洛树搜索(MonteCarloTreeSearch),缩写MCTS。MCTS不需要训练,可以直接做决策。训练策略网络和价值网络的目的是辅助MCTS。
-
人类玩家通常都会向前看几步;越是高手,看得越远。
-
MCTS的基本原理就是向前看,模拟未来可能发生的情况,从而找出当前最优的动作。AlphaGo每走一步棋,都要用MCTS做成千上万次模拟,从而判断出哪个动作的胜算最大。
-
步骤:
- Step1:选择:观测棋盘上当前的格局,找出所有空位,然后判断其中哪些位置符合围棋规则;每个符合规则的位置对应一个可行的动作。每一步至少有几十、甚至上百个可行的动作;假如挨个搜索和评估所有可行动作,计算量会大到无法承受。虽然有几十、上百个可行动作,好在只有少数几个动作有较高的胜算。选择(Selection)的目的就是找出胜算较高的动作,只搜索这些好的动作,忽略掉其他的动作。
- Step2:拓展:把第一步选中的动作记作at,它只是个假想的动作。AlphaGo需要考虑这样一个问题:假如它执行动作at,那么对手会执行什么动作呢?AlphaGo可以“推己及人”:如果AlphaGo认为几个动作很好,对手也会这么认为。所以AlphaGo用策略网络模拟对手,根据策略网络随机抽样一个动作。
- Step3:求值:从状态st+1开始,双方都用策略网络π做决策,在环境中交替落子,直到分出胜负。AlphaGo基于状态sk,根据策略网络抽样得到动作。对手再基于动作,观测到的棋盘上的新状态再根据策略网络抽样得到新动作,直到游戏结束。当这局游戏结束时,可以观测到奖励r。如果AlphaGo胜利,则r=+1,否则r=-1。状态st+1越好,则这局游戏胜算越大。因此,奖励r可以反映出st+1的好坏。此外,还可以用价值网络v评价状态st+1的好坏。价值v(st+1;w)越大,则说明状态st+1越好。
- Step4:回溯:再第三步求值中,算出了第t+1步某一个状态的价值,记作V(st+1);每一次模拟都会得出这样一个价值,并且记录下来。模拟会重复很多次,于是第t+1步每一种状态下面可以有多条记录;第t步的动作at下面有多个可能的状态(子节点),每个状态下面有若干条记录。把at下面所有的记录取平均,记作价值Q(at),它可以反映出动作at的好坏。
给定棋盘上的真实状态st,有多个动作a可供选择。对于所有的a,价值Q(a)的初始值是零。动作a每被选中一次(成为at),它下面就会多一条记录,我们就对Q(a)做一次更新。基于棋盘上真实的状态st,MCTS需要从可行的动作中选出一个,作为at。MCTS计算每一个动作a的分数:
-
原理推导比较多,还没懂,估计后面用不到就不细看了,有用到再回来补一下这部分知识
-
强化学习是机器学习中最难的一部分之一