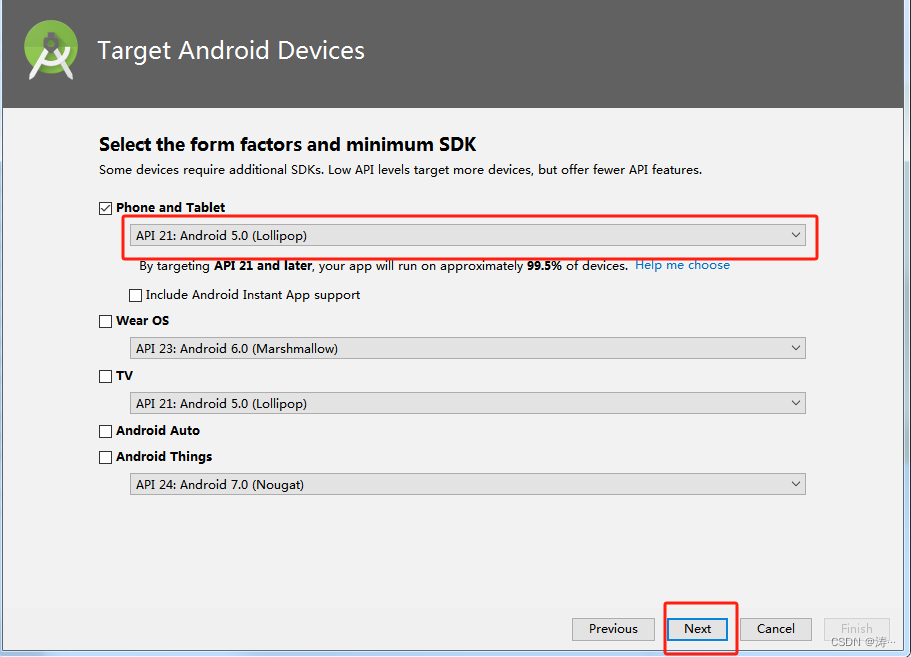
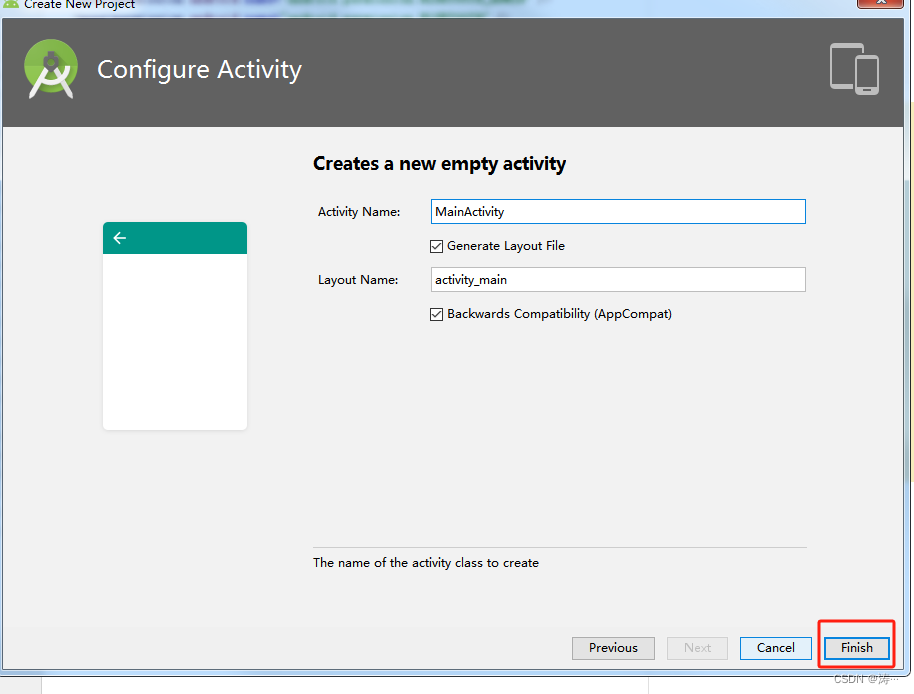
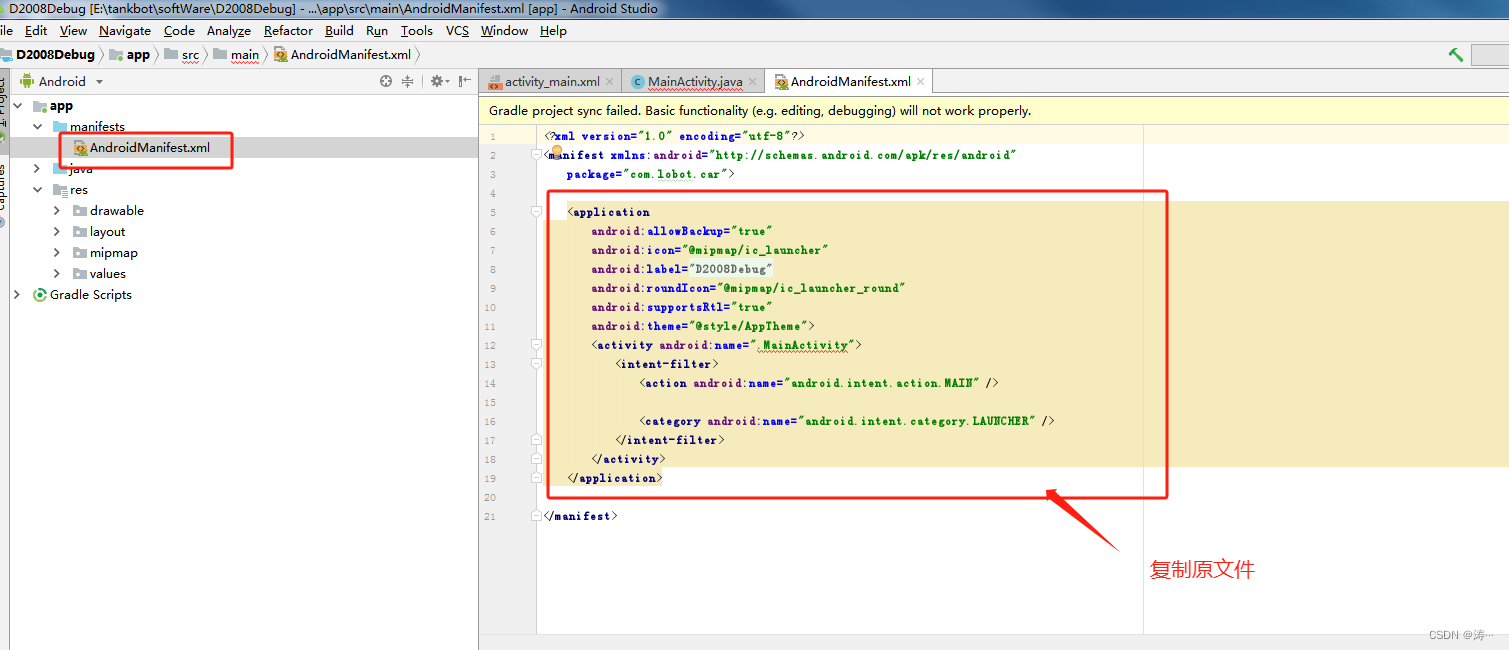
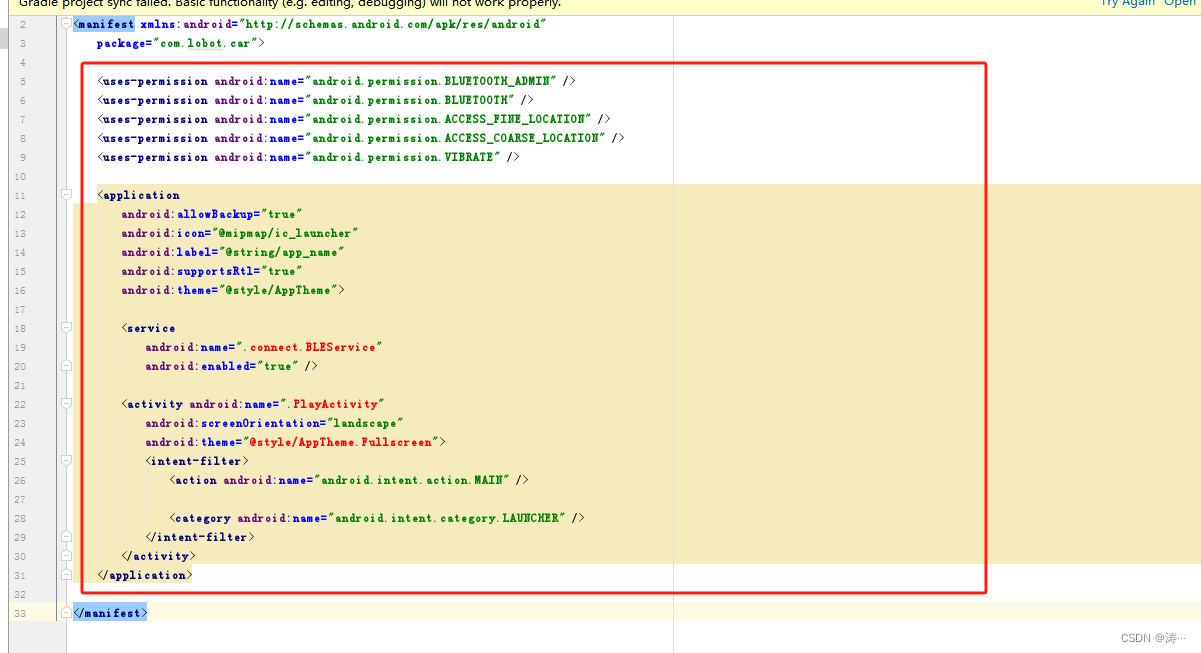
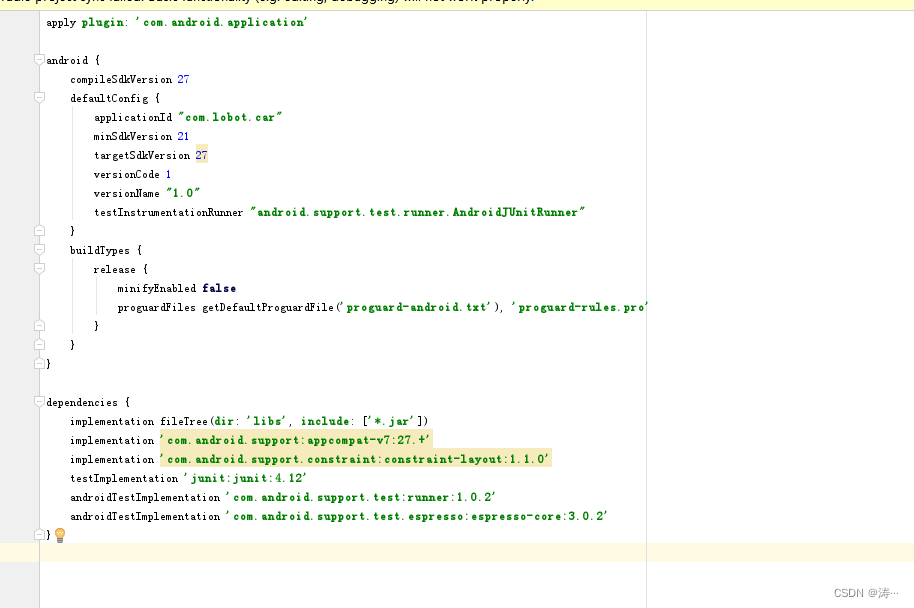
android studio 移植工程
news2026/2/13 8:08:24


本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1092575.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

第 125 场周赛 三元组
可恶,被longlong的长度卡住了,要是longlong再大一点就好了(bushi),其实是算法有问题,里面涉及1e9*1e9*1e9,longlong肯定存不下,一会儿去改改,先记录一下。
题目:竞赛 - …

树莓派玩转openwrt软路由:12.OpenWrt安装MySQL
1、安装MySQL
#下载MySQL镜像
docker pull arm64v8/mysql:latest#运行MySQL镜像
docker run --name mysql --restartalways --privilegedtrue \
-v /usr/local/mysql/data:/var/lib/mysql \
-v /usr/local/mysql/conf.d:/etc/mysql/conf.d \
-e MYSQL_ROOT_PASSWORD123456 -p …

C++——C++入门
C 前言一、认识C二、C入门C关键字(C98)命名空间命名空间定义命名空间使用 C输入&输出缺省参数缺省参数概念缺省参数分类 函数重载函数重载概念C支持函数重载的原理--名字修饰(name Mangling) 总结 前言
C的学习开始啦! 来吧~让我们拥抱更广阔的知识海洋&#x…
msvcp140.dll文件下载方法,找不到msvcp140.dll丢失的解决方法
在我日常的计算机维护和故障排除工作中,我遇到了许多由于丢失或损坏MSVCP140.dll文件而导致的程序无法正常运行的问题。这个DLL文件是Microsoft Visual C 2010 Redistributable Package的一部分,它是许多Windows应用程序(尤其是使用C编写的程…
![C++11中类与对象推出的新功能 [补充讲解final/override关键字]](https://img-blog.csdnimg.cn/faa13ab66d8e464a982dacbe8058a1f9.png)
C++11中类与对象推出的新功能 [补充讲解final/override关键字]
文章目录 1.移动构造2.移动赋值对于移动构造/移动赋值的想法 3.类成员定义时初始化4.强制生成默认函数的关键字default5.禁止生成默认函数的关键字delete5.1介绍5.2应用场景1.法一:析构函数私有化2.法二: delete关键字思考 6.final关键字7.override关键字 1.移动构造 编译器自动…
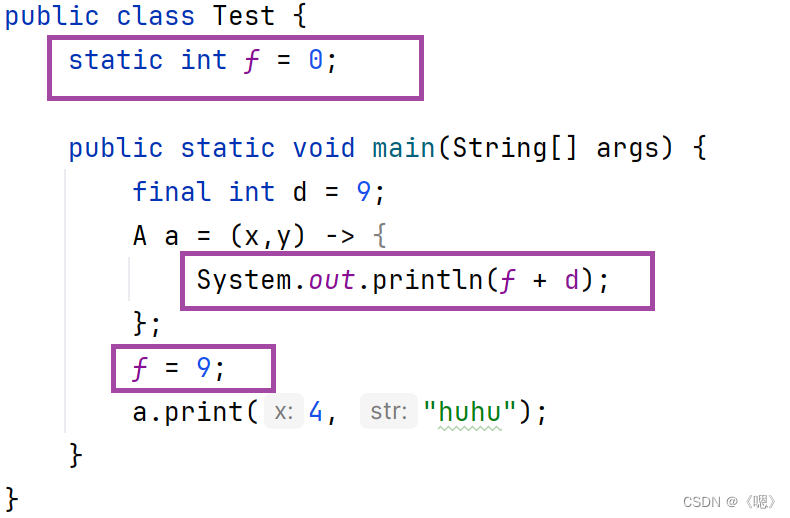
Lambda表达式(JAVA)
注:如果没有学过匿名内部类和接口不推荐往下看。
Lambda表达式的语法:
(parameters) -> expression 或 (parameters) ->{ statements; }
parameters:表示参数列表;->:可理解为“被用于”的意思;…

苹果修复了旧款iPhone上的iOS内核零日漏洞
导语 近日,苹果发布了针对旧款iPhone和iPad的安全更新,回溯了一周前发布的补丁,解决了两个被攻击利用的零日漏洞。这些漏洞可能导致攻击者在受影响的设备上提升权限或执行任意代码。本文将介绍这些漏洞的修复情况以及苹果在修复漏洞方面的持续…

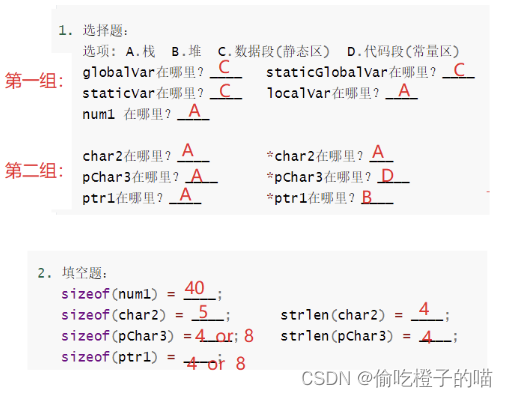
自定义类型:结构体,枚举,联合 (2)
2. 位段
位段的出现就是为了节省空间。
2.1 什么是位段 位段的声明和结构是类似的,有两个不同: 1.位段的成员必须是 int、unsigned int 或signed int 。 2.位段的成员名后边有一个冒号和一个数字。 比如:
struct A
{int _a:2;int _b:5;int…

ArcGIS笔记5_生成栅格文件时保存报错怎么办
本文目录 前言Step 1 直接保存到指定文件夹会报错Step 2 先保存到默认位置再数据导出到指定文件夹 前言
有时生成栅格文件时,保存在自定义指定的文件夹内会提示出错,而保存到默认位置则没有问题。因此可以通过先保存到默认位置,再数据导出到…

Vite与Webpack谁更胜一筹,谁将引领下一代前端工具的发展
你知道Vite和Webpack吗?也许有不少“程序猿”对它们十分熟悉。 Webpack
Webpack是一个JavaScript应用程序的静态模块打包工具,它会对整个应用程序进行依赖关系图构建。而这也会导致一个不可避免的情况,使用Webpack启动应用程序的服务器&…

GO-SLAM——论文简析
GO-SLAM
位姿估计效果很好,有高效的回环检测和 full BA(每个关键帧),适用于单目、双目和 RGB-D。
一、简介
消费级深度传感器容易产生噪声,这就导致 RGB-D SLAM 会丢失一些几何细节,导致过度平滑。使用轻…
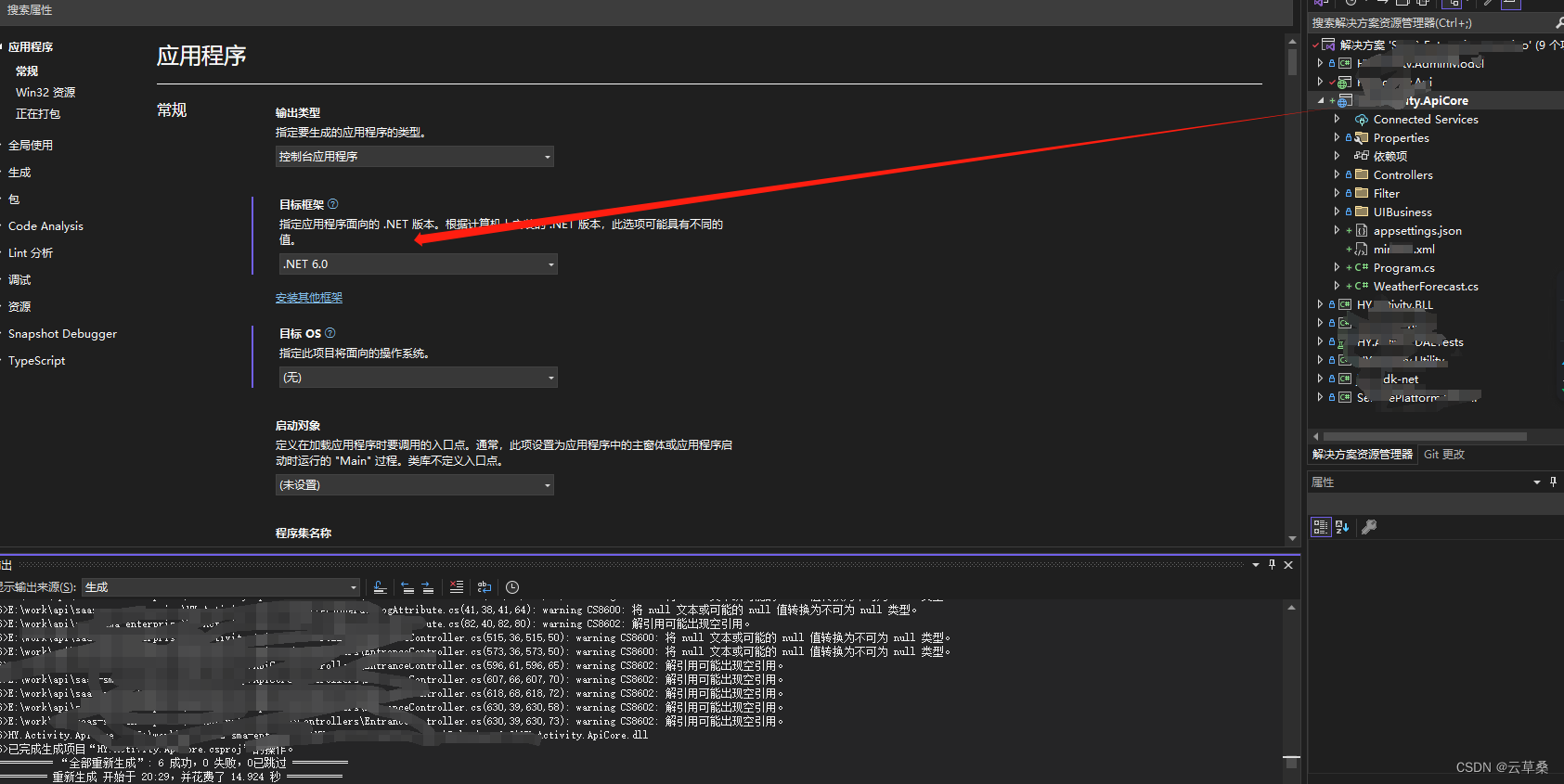
ASP.NET framework升级core .NET 6.0
C# ASP.NET framework 升级core .NET 6.0 .NET 7.0 .NET 8.0 或者以上 using System.Web.Http; using HttpPostAttribute Microsoft.AspNetCore.Mvc.HttpPostAttribute; using RouteAttribute Microsoft.AspNetCore.Mvc.RouteAttribute; using HttpGetAttribute Mic…
c++初阶--内存管理
目录 c/c 内存分布c内存管理方式new/delete操作内置类型new和delete操作自定义类型 operator new与operator delete函数new和delete的实现原理内置类型自定义类型 malloc/free和new/delete的区别内存泄露什么是内存泄漏,内存泄露的危害如何避免内存泄漏 在c语言中我…
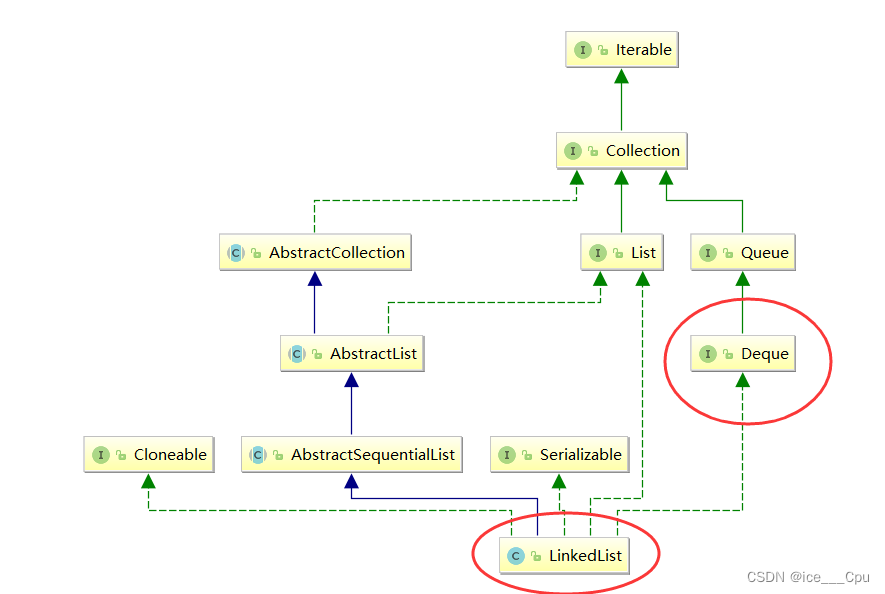
数据结构 - 4(栈和队列6000字详解)
一:栈
1.1 栈的概念
栈:一种特殊的线性表,其只允许在固定的一端进行插入和删除元素操作。进行数据插入和删除操作的一端称为栈顶,另一端称为栈底。栈中的数据元素遵守后进先出LIFO(Last In First Out)的原…

Go语言入门心法(三): 接口
Go语言入门心法(一)
Go语言入门心法(二): 结构体 一:go语言接口认知 Go语言中接口认知升维:解决人生问题的自我引导法则: 复盘思维|结构化思维|金字塔思维|体系化思维|系统化思维
面向对象编程(oop)三大特性: 封装,继承,多态
Go语言中,可以认为接口是一种自定义的抽…
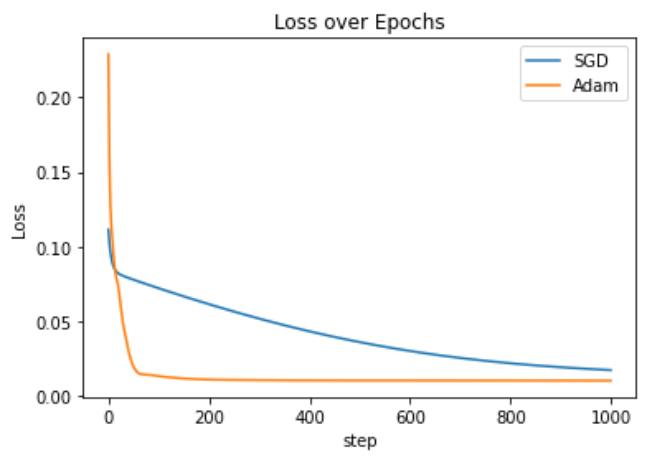
【Pytorch】深度学习之优化器
文章目录 Pytorch提供的优化器所有优化器的基类Optimizer 实际操作实验参考资料 优化器 根据网络反向传播的梯度信息来更新网络的参数,以起到降低loss函数计算值,使得模型输出更加接近真实标签的工具 学习目标 Pytorch提供的优化器
优化器的库torch.opt…
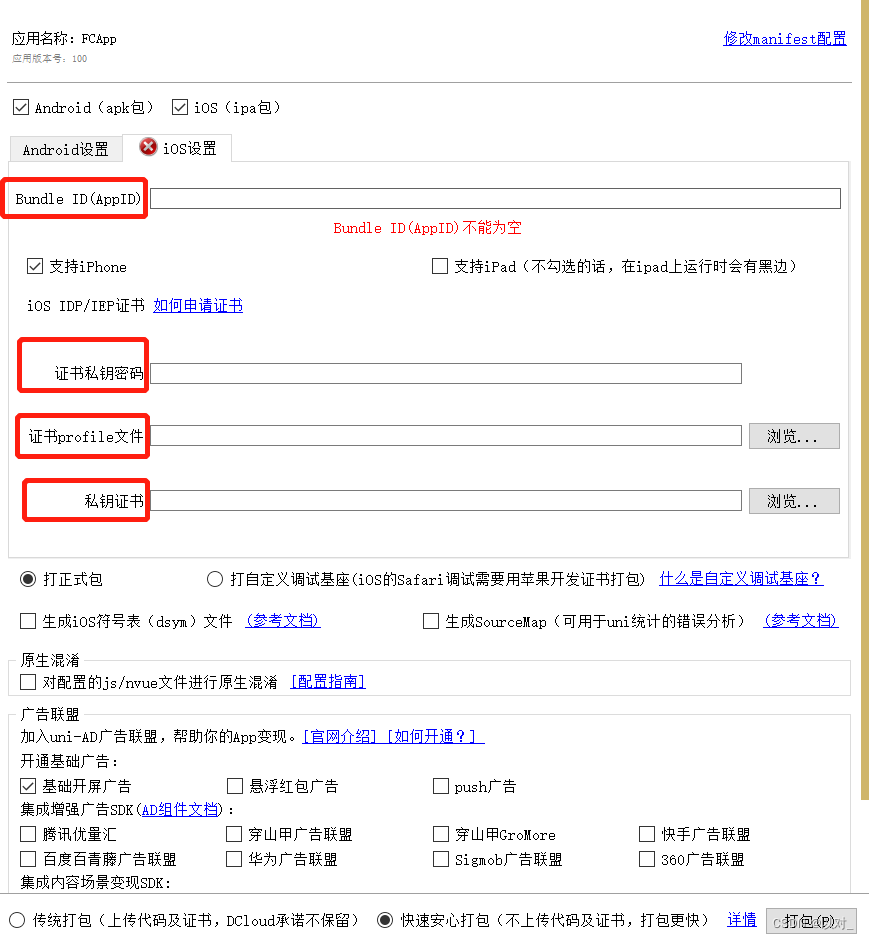
uniapp打包配置
安卓: 首先不管是什么打包都需要证书,安卓的证书一般都是公司提供或者自己去申请。然后把包名等下图框住的信息填上,点击打包即可。
ios:ios需要使用mac到苹果开发者平台去申请证书,流程可以参考下边的链接 参考链接…

Ceph 中的写入放大
新钛云服已累计为您分享769篇技术干货 介绍 Ceph 是一个开源的分布式存储系统,设计初衷是提供较好的性能、可靠性和可扩展性。 Ceph 独一无二地在一个统一的系统中同时提供了对象、块、和文件存储功能。 Ceph 消除了对系统单一中心节点的依赖,实现了无中…
基于单片机的感应自动门系统
目录
摘 要......................................................................................................................... 3
第一章 绪论.............................................................................................................…