前言
其实WIFI开关灯在几个月前就想做了,但是对于没有云平台调试经验的我,一开始有些摸不着头脑,所以就搁置了。十一假期与老同学聊天时了解到他也在做一个远程开关灯的小项目,所以就重新开始了WIFI远程开关灯的小项目。
本文使用到的AT固件,固件烧录工具,烧录方法以及调试上位机,全部在文末公众号中,关注并私信“ESP8266资料”,可以免费获取!
本文设计的PCB工程文件可以关注文末公众号,私信“远程开关灯PCB”获取!
文章目录
- 一、项目简介
- 二、硬件选型
- 三、连接腾讯云测试
- 3.1 AT固件烧录
- 3.2 云平台配置
- 3.2.1 新建产品
- 3.2.2 配置产品
- 3.3 上位机调试
- 四、所需AT指令
- 五、程序编写
- 5.1 ESP8266发送指令程序
- 5.2 接收云平台信息
- 5.3 舵机控制
- 六、PCB设计
- 七、优化方向
一、项目简介
本项目使用STM32F103C8T6作为主控芯片,搭配ESP8266,通过WIFI连接腾讯云来实现远程开关灯。腾讯云有自带的APP“腾讯连连”,但是目前苹果用户不能下载,不过他也有配套的小程序,十分友好。开关灯的功能由sg90舵机来实现。
目前只完成了第一版的软件开发,将功能分成了两种,一种是只需要关灯,也就是收到云平台的指令,就关灯,开灯需要手动。另一种就是既可以远程关灯,也可以远程开灯。之所以分成两种功能,是因为博主的需求只是能够睡前关灯,不再摸黑找床就够了!
二、硬件选型
- 主控芯片:STM32F103C8T6
- ESP8266:暂时使用的是正点原子的ESP8266,由于价格相对不太美丽,后续可能会更换。
- 舵机:sg90
对于ESP8266和sg90不甚了解的小伙伴不要慌,可以移步博主的“STM32外设系列专栏”查看!
三、连接腾讯云测试
其实上云的方法,除了需要了解掌握云平台的配置方法,其他与STM32外设专栏中介绍的,利用WIFI模块访问API并无太大的差别。在上云之前,我们需要先做好前期准备。
3.1 AT固件烧录
安可信提供了可连接腾讯云的AT固件,下载链接在评论区贴出!有需要资料的小伙伴可以直接关注文末公众号,私信发送“ESP8266资料”,获取本文全部资料。
获取到固件后,下一步就是使用固件烧录工具将固件烧录到我们的ESP8266中。这里需要用的USB转TTL,固件烧录工具以及烧录方法全部打包在公众号资料中,这里暂时不在做介绍。
值得注意的是,我们在给正点原子的ESP8266模组烧录固件时,需要注意一下接线方式,这里说明一下
ESP8266 USB-TTL
VCC ----- 5V
GND ----- GND
TXD ----- RXD
RXD ----- TXD
IO_0 ----- GND
在烧录完固件后,再将IO_0置空,重新上电即可。
3.2 云平台配置
首先进入腾讯云平台,连接放在评论区。注册账号后进入到“实例管理”。
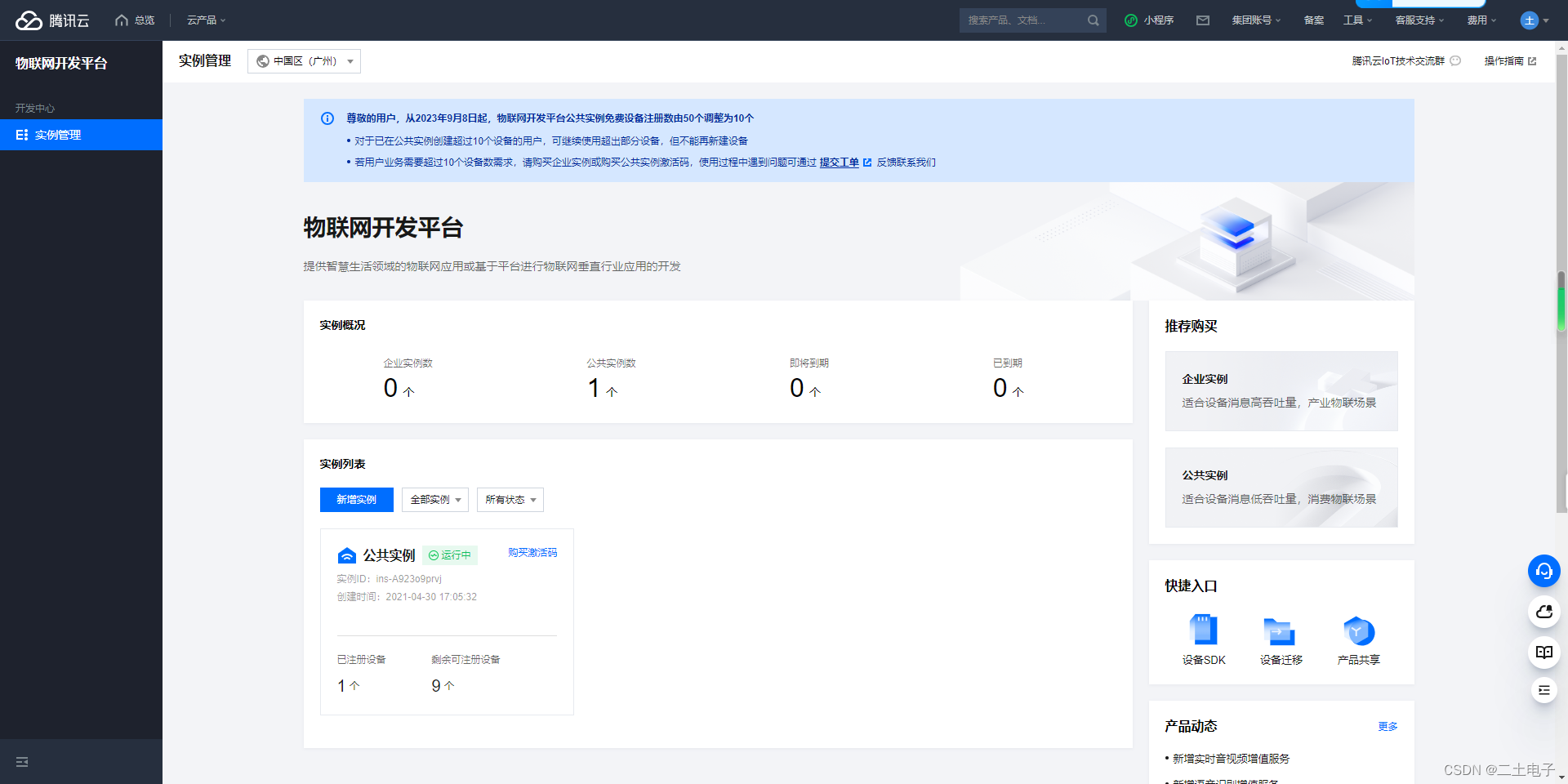
这里因为已经创建过,所以和最开始使用的小伙伴显示的有所不同,但是不影响介绍配置步骤。
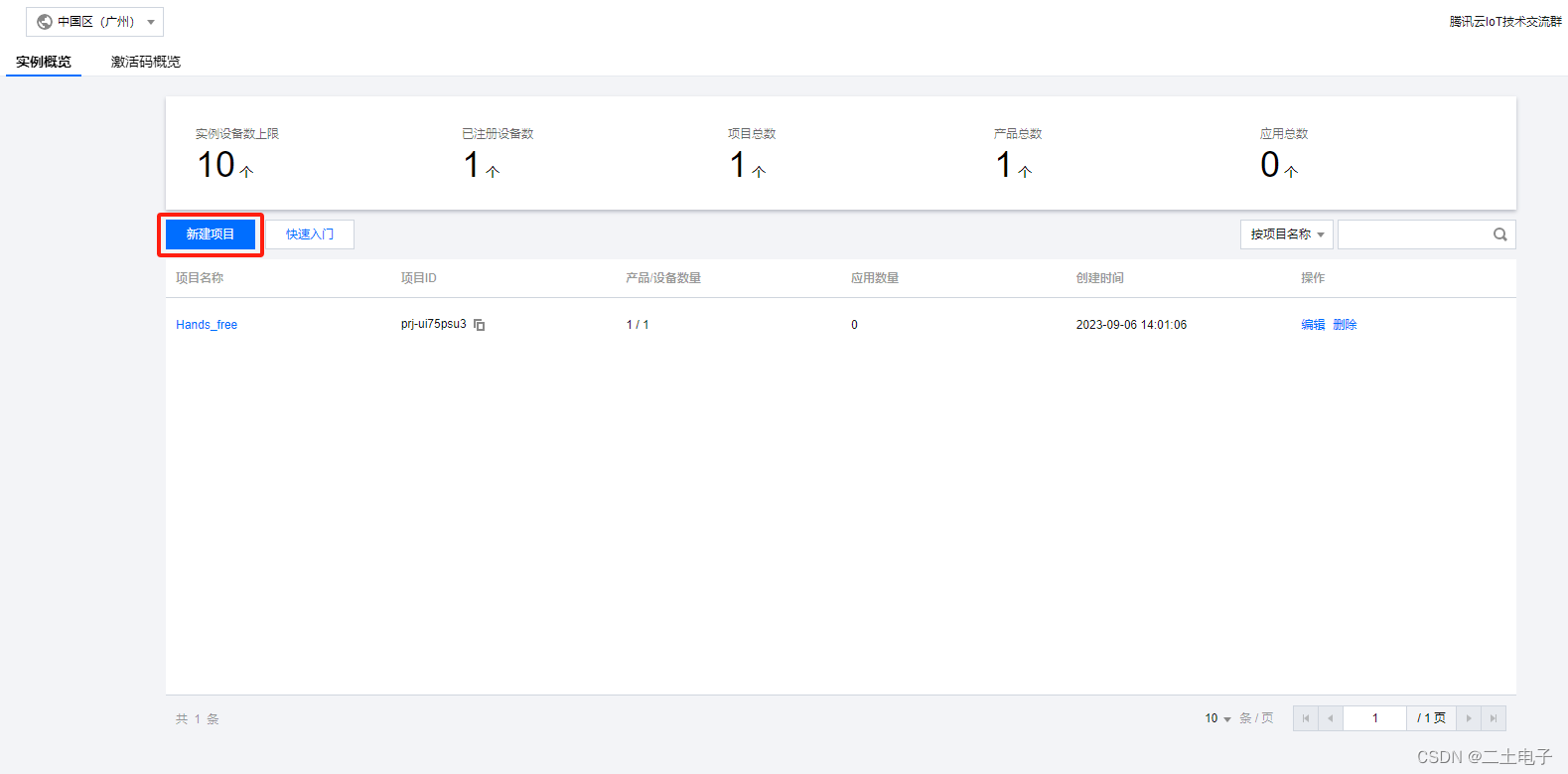
3.2.1 新建产品
点击进入公共实例,点击“新建项目”,输入相关信息。
新建完项目后,点击进入新建的项目,然后点击“新建产品”,按照下图选择并输入相关信息。

3.2.2 配置产品
首先是“物模型”,我们是需要实现开关灯,这里我们只配置一个简单的属性。点击“新建自定义功能”,按照下图配置并输入相关信息。

添加完成后点击下一步,进入“设备开发”,选择“基于模组开发”。

选择模组时选择下面的模组
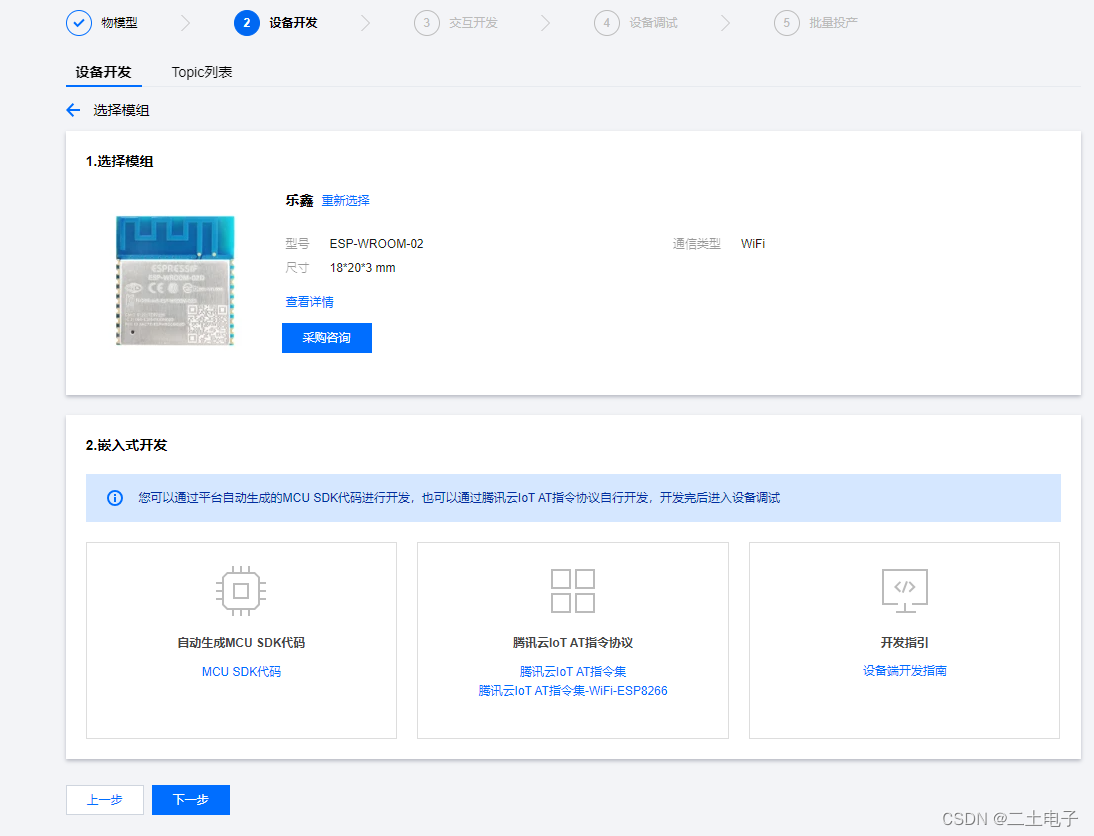
点击下一步之后,进入“交互开发”。除了下图的“配网引导”需要按照下图选择,其他的可自行配置。

配置完成后,来到“设备调试”,新建完设备后,云平台部分就配置完成。新建完设备后点击产品,进入后可以看到设备信息。设备信息中的“设备名称”、“产品ID”、“设备密钥”在后续会使用到。

3.3 上位机调试
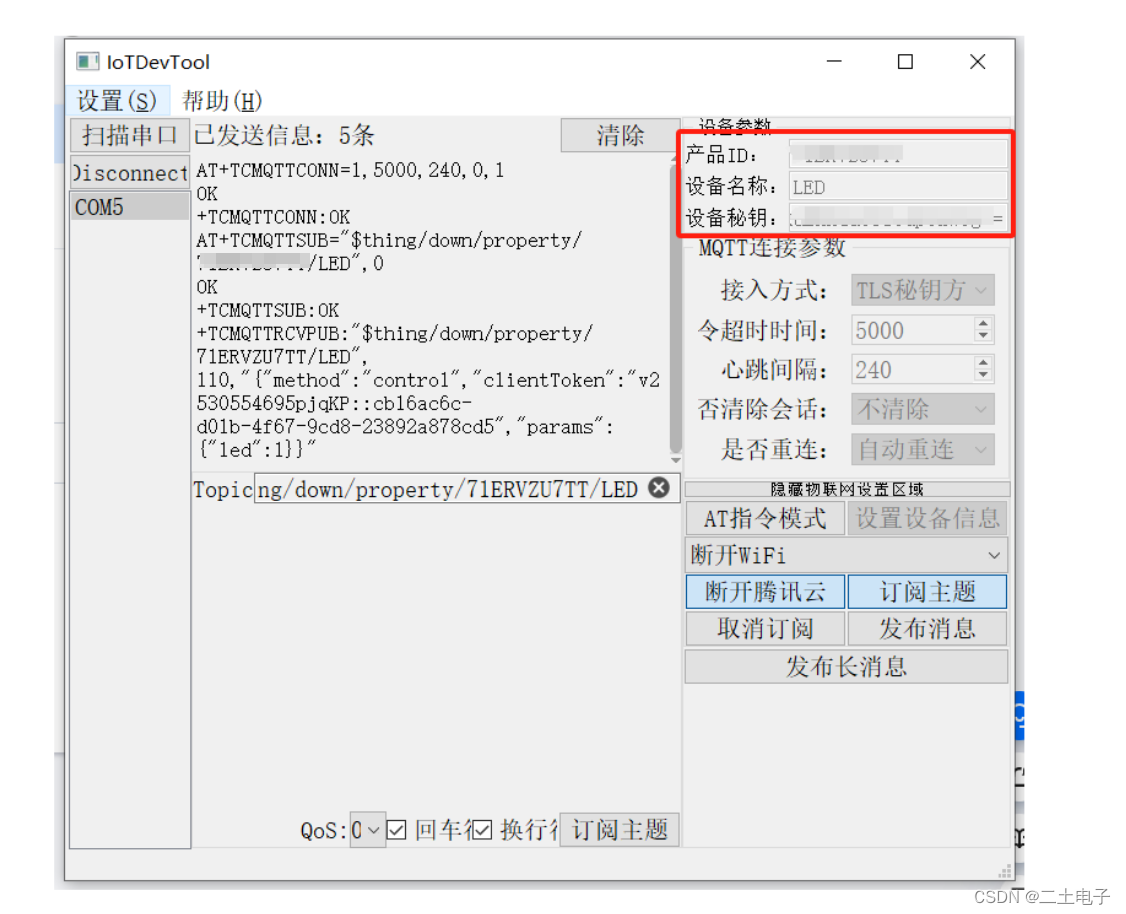
上位机使用公众号资料中提供的上位机。用USB转TTL连接上ESP8266,打开上位机,`打开对应串口。输入上面的设备信息。
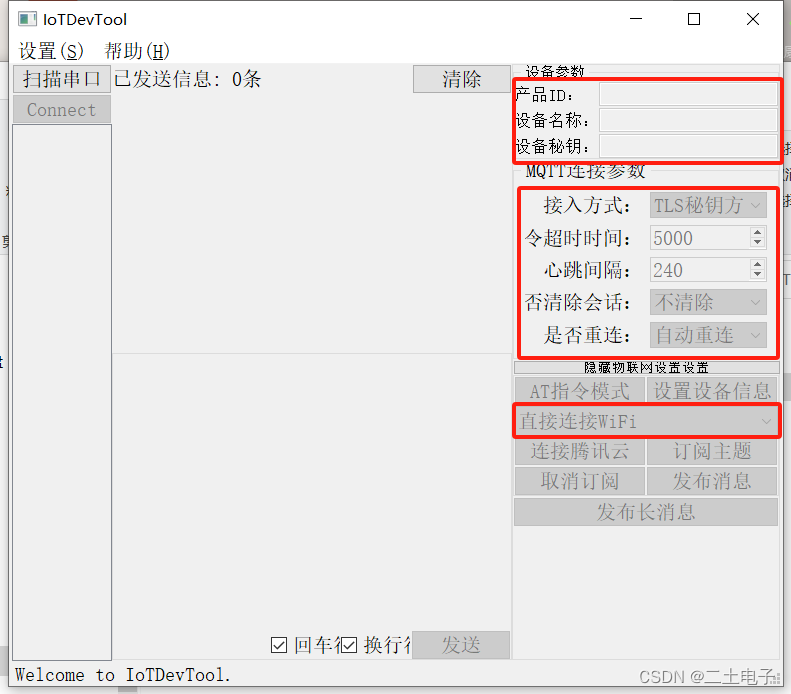
点击“直接连接WIFI”,输入要连接的WIFI名称和WIFI密码。等待连接上WIFI后,点击连接腾讯云。此时可以去云平台的设备调试中看一下设备是否处于在线状态。设备在线后,需要订阅主题,订阅主题时需要输入
$thing/down/property/产品ID/设备名称
订阅完成后就可以在云平台进行控制。点击云平台上在线调试中的“发送”,串口就可以收到服务器发送的消息。
四、所需AT指令
上面介绍了如何利用上位机来实现上云,并且收到云平台发送的指令。我们可以看到,实际上位机也是使用发送AT指令的方式实现的,所以我们在利用单片机+ESP8266上云时,模仿上位机去发送这些AT指令,一样可以上云。这里按发送顺序列举一下需要用到的几条AT指令。
AT+CWJAP="WIFINAME","WIFIPASSWORD" // 连接指定WIFI
AT+TCDEVINFOSET=1,"PRODUCTID","DEVICENAME","DEVICEKEY" // 发送设备信息
AT+TCMQTTCONN=1,5000,240,1,0 // 配置MQTT参数
AT+TCMQTTSUB="$thing/down/property/PRODUCTID/DEVICENAME",0 // 订阅主题
需要注意的是,每条AT指令后面都需要加换行和回车!
五、程序编写
5.1 ESP8266发送指令程序
发送指令程序如下
/*
*==============================================================================
*函数名称:Med_Esp8266_CheckLink
*函数功能:检查ESP8266连接状态
*输入参数:str:要发送的指令;
*返回值:无
*备 注:调用前先将需要发送的内容利用sprintf()函数转换成字符串
串口1发送指令,串口2返回信息
*==============================================================================
*/
void Med_Esp8266_SendCmd (u8 *str)
{
while (!gSetSuccessFlag)
{
// 发送AT指令
USART_Send(UART1,str);
// 这里延时4s,防止出现虚假上云现象
delay_ms(1000);
delay_ms(1000);
delay_ms(1000);
delay_ms(1000);
gSendCunt = gSendCunt + 1; // 发送次数加1
// 检测接收内容
Med_Esp8266_Uartrece_Pares();
if (gSendCunt > 10)
{
// 发送失败
}
}
gSendCunt = 0; // 清零发送次数
gSetSuccessFlag = 0; // 清零配置成功变量
}
其实实质是利用串口1,将需要发送的字符串发送出去。关于串口发送程序,可以到“STM32速成笔记”专栏查看,这里就不再做详细介绍了。
发送AT指令的完整程序如下
/*
*==============================================================================
*函数名称:App_Esp8266_Init
*函数功能:ESP8266初始化
*输入参数:无
*返回值:无
*备 注:检测ESP8266连接状态,并连接指定WIFI
*==============================================================================
*/
void App_Esp8266_Init (void)
{
// 连接指定WIFI
sprintf((char*)gString,"AT+CWJAP=\"%s\",\"%s\"\r\n",WIFINAME,WIFIPASSWORD);
Med_Esp8266_SendCmd(gString);
}
/*
*==============================================================================
*函数名称:App_Esp8266_Connect_Tencentcloud
*函数功能:连接腾讯云
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void App_Esp8266_Connect_Tencentcloud (void)
{
// 设置平台设备信息
sprintf((char*)gString,"AT+TCDEVINFOSET=1,\"%s\",\"%s\",\"%s\"\r\n",PRODUCTID,DEVICENAME,DEVICEKEY);
Med_Esp8266_SendCmd(gString);
// 配置MQTT连接参数
sprintf((char*)gString,"AT+TCMQTTCONN=1,5000,240,1,0\r\n");
Med_Esp8266_SendCmd(gString);
// 订阅MQTT主题信息
sprintf((char*)gString,"AT+TCMQTTSUB=\"$thing/down/property/%s/%s\",0\r\n",PRODUCTID,DEVICENAME);
Med_Esp8266_SendCmd(gString);
}
5.2 接收云平台信息
其实针对云平台信息的接收很简单,是否收到云平台消息的标准是,接收到的字符串中是否有关键词“led”。接收判断程序如下
/*
*==============================================================================
*函数名称:Med_SG90_Uartrece_Pares
*函数功能:解析串口接收内容
*输入参数:无
*返回值:无
*备 注:无
*==============================================================================
*/
void Med_SG90_Uartrece_Pares (void) // 串口接收内容解析函数
{
u16 tempVar = 0; // 临时循环变量
if (gReceEndFlag == 1) // 如果接收完成
{
// 解析接收内容
for (tempVar = 0;tempVar < gReceCount;tempVar ++)
{
// 腾讯云下发消息解析
if (gReceFifo[tempVar] == 'l' && gReceFifo[tempVar + 1] == 'e' && gReceFifo[tempVar + 2] == 'd')
{
// 解析开关灯指令
gRecCloudOrder = 1;
break;
}
}
// 清空接收数组
for (gClearCount = 0;gClearCount < gReceCount;gClearCount ++)
{
gReceFifo[gClearCount] = ' ';
}
gReceEndFlag = 0; // 清除接收完成标志位
gReceCount = 0; // 清零接收计数变量
}
}
关于如何解析接收字符串,如果看上面的程序还是不理解,可以到“STM32外设系列”专栏中WIFI篇查看。或者到“STM32实战项目”专栏中密码锁篇查看。
5.3 舵机控制
舵机使用TIM2的PWM通道2来控制,关于sg90的详细控制资料,可以到“STM32外设系列”专栏查看,程序工程可关注文末公众号私信获取。
这里定义了一个函数,可以控制舵机旋转到指定角度。
/*
*==============================================================================
*函数名称:Med_Sg90_Spin
*函数功能:SG90旋转到指定角度
*输入参数:angle:旋转到的指定角度
*返回值:无
*备 注:无
*==============================================================================
*/
void Med_Sg90_Spin (u16 angle)
{
TIM_SetCompare2(TIM2,195 - angle / 9); // 旋转到指定角度
delay_ms(500);
}
上面介绍了,项目有两种不同的功能,可以利用宏定义开关。舵机根据宏定义开关的不同,可以实现不同的功能。舵机开关灯程序如下
// 以下变量在其头文件中进行了全局声明
u8 gRecCloudOrder = 0; // 收到云平台指令标志位
/*
*==============================================================================
*函数名称:App_Sg90_LedCtrl
*函数功能:SG90开关灯
*输入参数:无
*返回值:无
*备 注:根据需求选择宏定义开关
*==============================================================================
*/
#if CLOSE_AND_OPEN
u8 gOpenCloseCtrlFlag = 0; // 开关控制标志位
#endif
void App_Sg90_LedCtrl (void)
{
Med_SG90_Uartrece_Pares(); // 接收串口内容并解析
#if ONLY_CLOSE
if (gRecCloudOrder == 1)
{
Med_Sg90_Spin(CLOSEANGLE); // 舵机旋转关灯
delay_ms(500);
Med_Sg90_Spin(99); // 舵机归零
delay_ms(500);
gRecCloudOrder = 0;
}
#elif CLOSE_AND_OPEN
if (gRecCloudOrder == 1)
{
gOpenCloseCtrlFlag = gOpenCloseCtrlFlag + 1;
// 范围限制
if (gOpenCloseCtrlFlag >= 3)
{
gOpenCloseCtrlFlag = 1;
}
}
if (gRecCloudOrder == 1 && gOpenCloseCtrlFlag == 1)
{
Med_Sg90_Spin(CLOSEANGLE); // 舵机旋转关灯
delay_ms(500);
Med_Sg90_Spin(99); // 舵机归零
delay_ms(500);
gRecCloudOrder = 0;
}
else if (gRecCloudOrder == 1 && gOpenCloseCtrlFlag == 2)
{
Med_Sg90_Spin(OPENANGLE); // 舵机旋转开灯
delay_ms(500);
Med_Sg90_Spin(99); // 舵机归零
delay_ms(500);
gRecCloudOrder = 0;
}
#endif
}
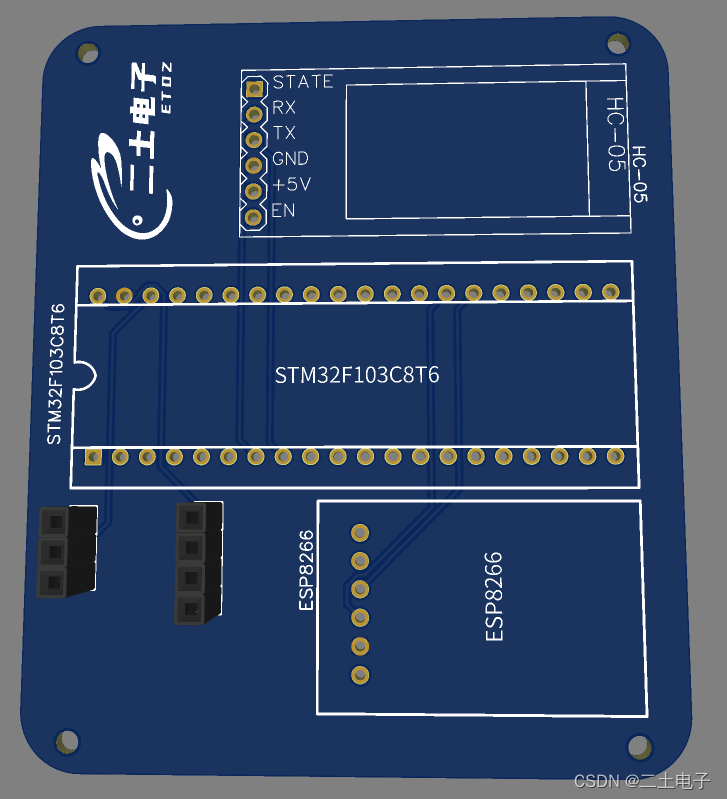
六、PCB设计
本项目的第一版PCB已经设计完成,如有需要,可关注文末公众号,私信“远程开关灯PCB”获取,这里贴一下PCB的3D预览图。
七、优化方向
- 未加入ESP8266连接异常检测程序。
- 如果需要修改连接的WIFI,需要重新烧写程序。可以尝试使用HC-05来输入要连接的WIFI信息,如果小伙伴有其他好的办法,欢迎私信讨论或者评论区讨论。
- PCB没有加入电源部分电路,后续考虑使用电池供电。

![[硬件基础]-快速了解555定时器](https://img-blog.csdnimg.cn/4e4777f47be444f580dcdab1209f35ac.png#pic_center)