前言:
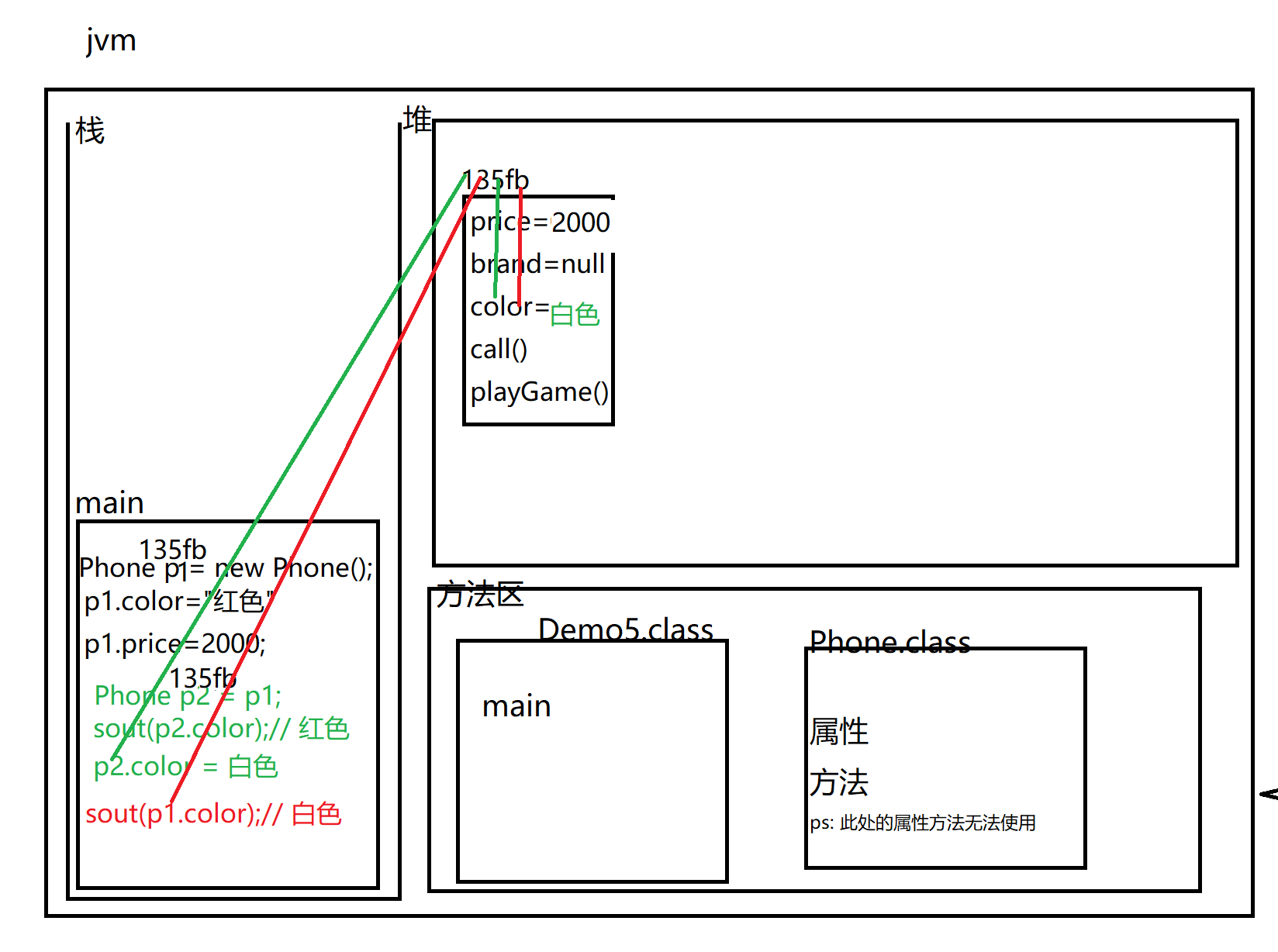
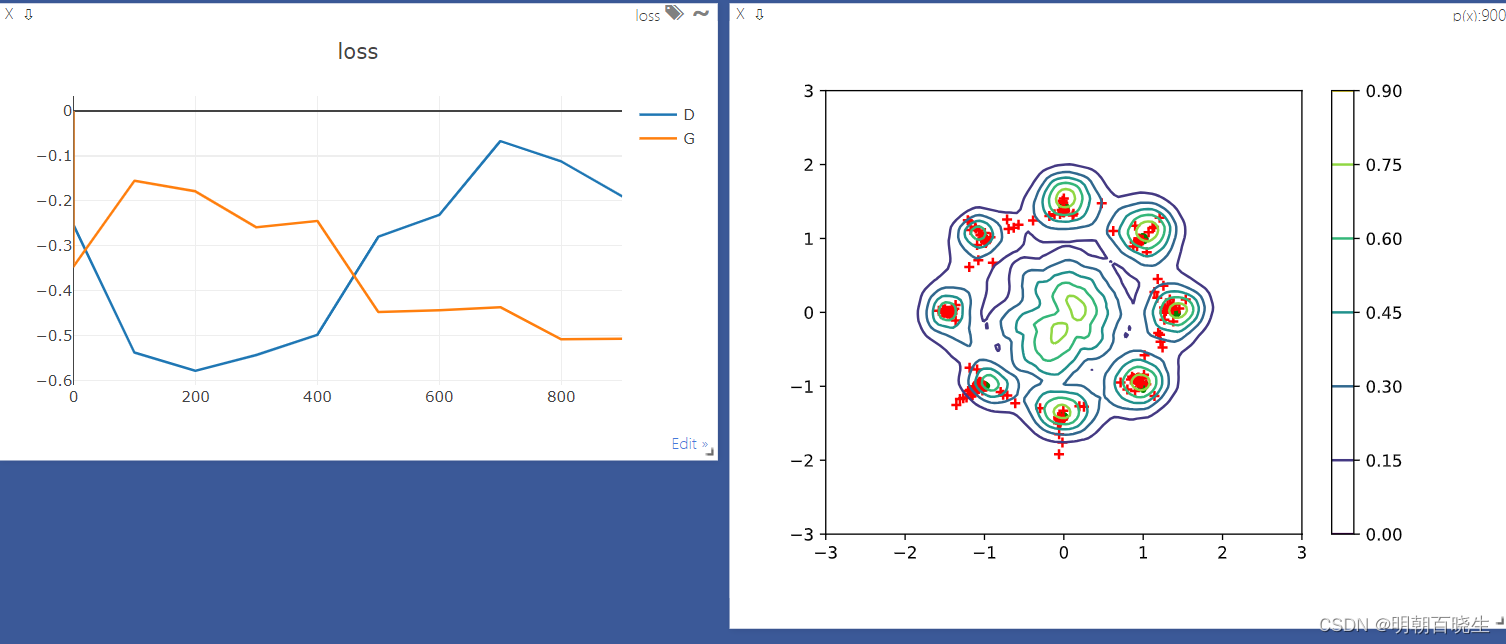
下图为WGAN 的效果图:
绿色为真实数据的分布: 8个高斯分布
红色: 为随机产生的数据分布,跟真实分布基本一致
WGAN-GP:
1 判别器D: 最后一层去掉sigmoid
2 生成器G 和判别器D: loss不取log
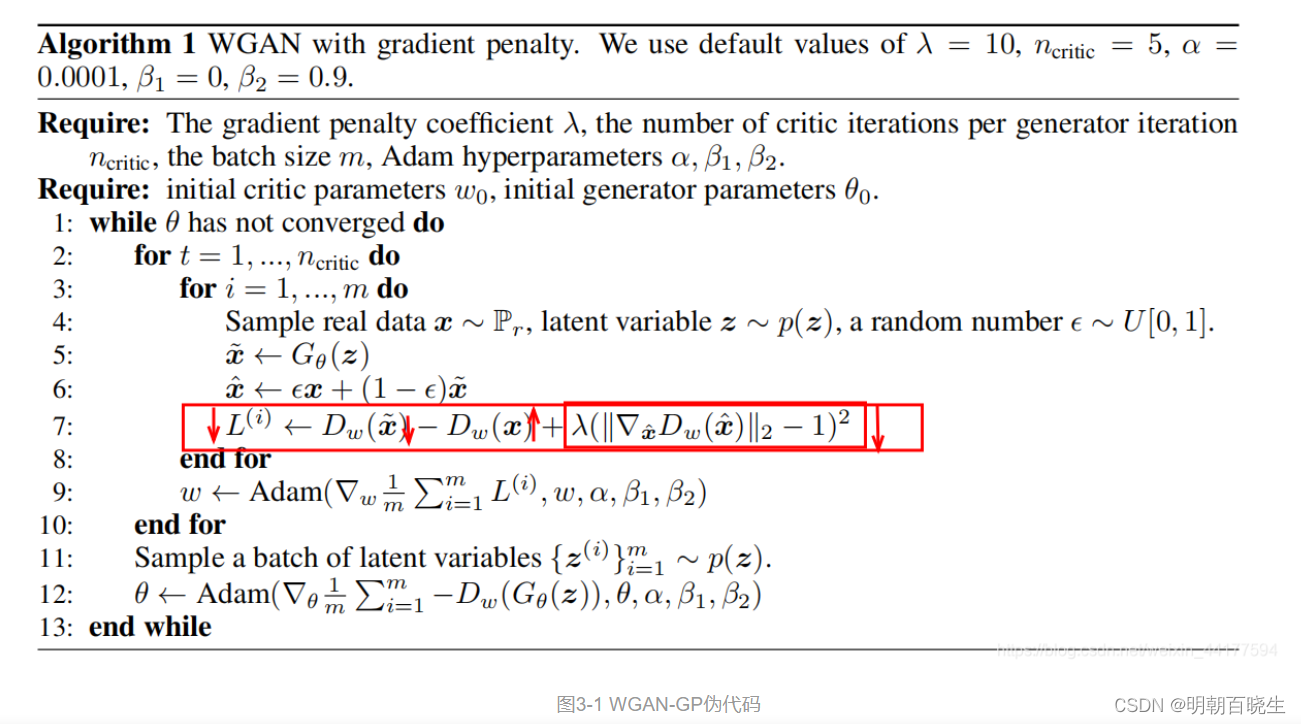
3 损失函数 增加了penalty,使用Adam
Wasserstein GAN
1 判别器D: 最后一层去掉sigmoid
2 生成器G 和判别器D: loss不取log
3 每次更新判别器的参数之后把它们的绝对值截断到不超过一个固定常数c
4 不要用基于动量的优化算法(包括momentum和Adam),推荐RMSProp,SGD也行
一 简介
1.1 模型结构

1.2 伪代码
二 wgan.py
主要变化:
Generator 中 去掉了之前的logit 函数
# -*- coding: utf-8 -*-
"""
Created on Thu Sep 28 11:10:19 2023
@author: chengxf2
"""
import torch
from torch import nn
#生成器模型
h_dim = 400
class Generator(nn.Module):
def __init__(self):
super(Generator,self).__init__()
# z: [batch,input_features]
self.net = nn.Sequential(
nn.Linear(2, h_dim),
nn.ReLU(True),
nn.Linear( h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, h_dim),
nn.ReLU(True),
nn.Linear(h_dim, 2)
)
def forward(self, z):
output = self.net(z)
return output
#鉴别器模型
class Discriminator(nn.Module):
def __init__(self):
super(Discriminator,self).__init__()
hDim=400
# x: [batch,input_features]
self.net = nn.Sequential(
nn.Linear(2, hDim),
nn.ReLU(True),
nn.Linear(hDim, hDim),
nn.ReLU(True),
nn.Linear(hDim, hDim),
nn.ReLU(True),
nn.Linear(hDim, 1),
)
def forward(self, x):
#x:[batch,1]
output = self.net(x)
out = output.view(-1)
return out
三 main.py
主要变化:
损失函数中增加了gradient_penalty
# -*- coding: utf-8 -*-
"""
Created on Thu Sep 28 11:28:32 2023
@author: chengxf2
"""
import visdom
from gan import Discriminator
from gan import Generator
import numpy as np
import random
import torch
from torch import nn, optim
from matplotlib import pyplot as plt
from torch import autograd
h_dim =400
batchsz = 256
viz = visdom.Visdom()
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
def weights_init(net):
if isinstance(net, nn.Linear):
# net.weight.data.normal_(0.0, 0.02)
nn.init.kaiming_normal_(net.weight)
net.bias.data.fill_(0)
def data_generator():
"""
8- gaussian destribution
Returns
-------
None.
"""
scale = 2
a = np.sqrt(2.0)
centers =[
(1,0),
(-1,0),
(0,1),
(0,-1),
(1/a,1/a),
(1/a,-1/a),
(-1/a, 1/a),
(-1/a,-1/a)
]
centers = [(scale*x, scale*y) for x,y in centers]
while True:
dataset =[]
for i in range(batchsz):
point = np.random.randn(2)*0.02
center = random.choice(centers)
point[0] += center[0]
point[1] += center[1]
dataset.append(point)
dataset = np.array(dataset).astype(np.float32)
dataset /=a
#生成器函数是一个特殊的函数,可以返回一个迭代器
yield dataset
def generate_image(D, G, xr, epoch): #xr表示真实的sample
"""
Generates and saves a plot of the true distribution, the generator, and the
critic.
"""
N_POINTS = 128
RANGE = 3
plt.clf()
points = np.zeros((N_POINTS, N_POINTS, 2), dtype='float32')
points[:, :, 0] = np.linspace(-RANGE, RANGE, N_POINTS)[:, None]
points[:, :, 1] = np.linspace(-RANGE, RANGE, N_POINTS)[None, :]
points = points.reshape((-1, 2)) # (16384, 2)
x = y = np.linspace(-RANGE, RANGE, N_POINTS)
N = len(x)
# draw contour
with torch.no_grad():
points = torch.Tensor(points) # [16384, 2]
disc_map = D(points).cpu().numpy() # [16384]
plt.contour(x, y, disc_map.reshape((N, N)).transpose())
#plt.clabel(cs, inline=1, fontsize=10)
plt.colorbar()
# draw samples
with torch.no_grad():
z = torch.randn(batchsz, 2) # [b, 2]
samples = G(z).cpu().numpy() # [b, 2]
plt.scatter(xr[:, 0], xr[:, 1], c='green', marker='.')
plt.scatter(samples[:, 0], samples[:, 1], c='red', marker='+')
viz.matplot(plt, win='contour', opts=dict(title='p(x):%d'%epoch))
def gradient_penalty(D, xr,xf):
#[b,1]
t = torch.rand(batchsz, 1).to(device)
#[b,1]=>[b,2] 保证每个sample t 相同
t = t.expand_as(xr)
#sample penalty interpoation [b,2]
mid = t*xr +(1-t)*xf
mid.requires_grad_()
pred = D(mid) #[256]
'''
grad_outputs: 如果outputs 是向量,则此参数必须写
retain_graph: True 则保留计算图, False则释放计算图
create_graph: 若要计算高阶导数,则必须选为True
allow_unused: 允许输入变量不进入计算
'''
grads = autograd.grad(outputs= pred, inputs = mid,
grad_outputs= torch.ones_like(pred),
create_graph=True,
retain_graph=True,
only_inputs=True)[0]
gp = torch.pow(grads.norm(2, dim=1)-1,2).mean()
return gp
def main():
lambd = 0.2 #超参数
maxIter = 1000
torch.manual_seed(10)
np.random.seed(10)
data_iter = data_generator()
G = Generator().to(device)
D = Discriminator().to(device)
G.apply(weights_init)
D.apply(weights_init)
optim_G = optim.Adam(G.parameters(),lr =5e-4, betas=(0.5,0.9))
optim_D = optim.Adam(D.parameters(),lr =5e-4, betas=(0.5,0.9))
K = 5
viz.line([[0,0]], [0], win='loss', opts=dict(title='loss', legend=['D', 'G']))
for epoch in range(maxIter):
#1: train Discrimator fistly
for k in range(K):
#1.1: train on real data
xr = next(data_iter)
xr = torch.from_numpy(xr).to(device)
predr = D(xr)
#max(predr) == min(-predr)
lossr = -predr.mean()
#1.2: train on fake data
z = torch.randn(batchsz,2).to(device) #[b,2] 随机产生的噪声
xf = G(z).detach() #固定G,不更新G参数 tf.stop_gradient()
predf =D(xf)
lossf = predf.mean()
#1.3 gradient_penalty
gp = gradient_penalty(D, xr,xf.detach())
#aggregate all
loss_D = lossr + lossf +lambd*gp
optim_D.zero_grad()
loss_D.backward()
optim_D.step()
#print("\n Discriminator 训练结束 ",loss_D.item())
# 2 train Generator
#2.1 train on fake data
z = torch.randn(batchsz, 2).to(device)
xf = G(z)
predf =D(xf) #期望最大
loss_G= -predf.mean()
#optimize
optim_G.zero_grad()
loss_G.backward()
optim_G.step()
if epoch %100 ==0:
viz.line([[loss_D.item(), loss_G.item()]], [epoch], win='loss', update='append')
generate_image(D, G, xr, epoch)
print("\n epoch: %d"%epoch,"\t lossD: %7.4f"%loss_D.item(),"\t lossG: %7.4f"%loss_G.item())
if __name__ == "__main__":
main()
参考:
课时130 WGAN-GP实战_哔哩哔哩_bilibili
WGAN基本原理及Pytorch实现WGAN-CSDN博客
CSDN

![[C++基础]-多态](https://img-blog.csdnimg.cn/8daed871137246219ff7dfe3c58fb5a3.png)