💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
地图汽车UGV(无人地面车辆)与IMU(惯性测量单元)的跟踪研究在自动驾驶和导航领域具有重要意义。这项研究旨在通过融合UGV的地图信息和IMU的惯性测量数据,实现对车辆精确位置和运动状态的估计和跟踪。
对于地图汽车UGV来说,地图提供了预先建立的环境信息,包括道路网络、标记物、障碍物等。而IMU则通过测量车辆的加速度和角速度,提供了关于车辆运动的即时测量值。将这两者融合起来,可以实现对车辆位置、方向和运动轨迹的连续估计。
在地图汽车UGV + IMU跟踪研究中,通常会使用状态估计方法,比如扩展卡尔曼滤波器(EKF)或无迹卡尔曼滤波器(UKF)。这些方法通过组合地图信息、IMU数据和其他传感器数据(如视觉、激光雷达等),进行状态的预测和更新,以实现对车辆位置的实时估计。
此外,地图汽车UGV + IMU跟踪研究还需要考虑传感器数据之间的时间同步、精度误差以及环境变化对跟踪性能的影响。因此,研究人员还需要进行传感器校准、数据预处理和误差补偿等工作,以提高跟踪的准确性和鲁棒性。
这项研究的目标是实现对地图汽车UGV的精确跟踪和定位,为自动驾驶、路径规划和导航系统等提供可靠的位置信息,以及增强对车辆运动状态的理解和判断能力。
📚2 运行结果
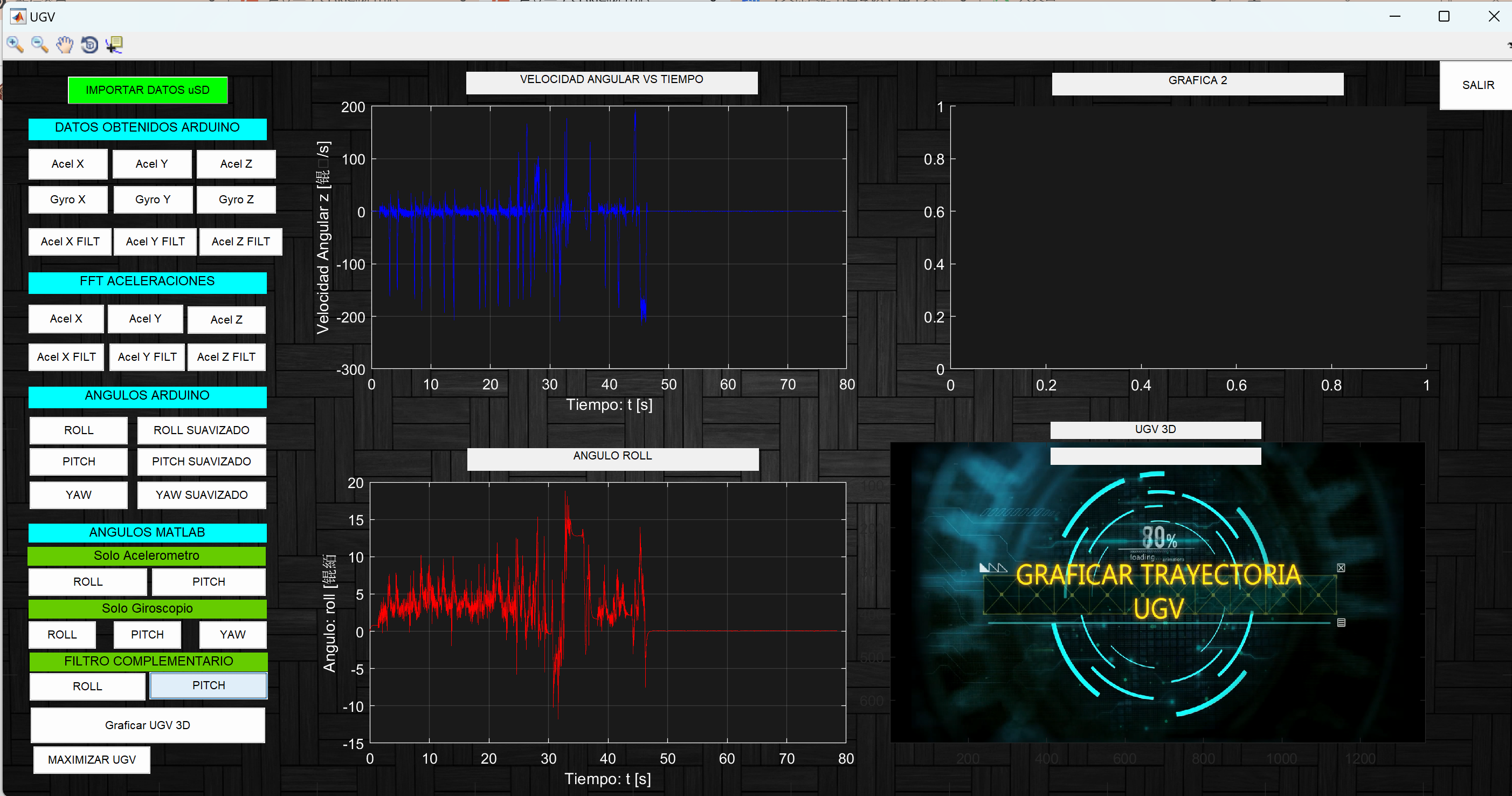
部分代码:
function [x4 ,y4 ,z4]=Rotacion3D_q2(x,y,z,teta3,teta2,teta)
%Grafica vector en 3D, x y z representan los vectores desde donde empieza el movimiento ..teta3,teta2,teta (en �) representan los angulos alrededor de los ejes X,Y,Z de la IMU
teta3=(teta3*2*pi)/360;
teta2=(teta2*2*pi)/360;
teta=(teta*2*pi)/360;
%OPERADOR ROTACION CUATERNION v�=q*v*r (r=q^-1)
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta/2)*z;
Q = [cos(teta/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
d1=[0 x(1) x(2) x(3)];
d2=[0 y(1) y(2) y(3)];
d3=[0 z(1) z(2) z(3)];
n1 = quatmultiply(Q,d1);
n1 = quatmultiply(n1,R);
n2 = quatmultiply(Q,d2);
n2 = quatmultiply(n2,R);
n3 = quatmultiply(Q,d3);
n3 = quatmultiply(n3,R);
x2=[n1(2) n1(3) n1(4)];
y2=[n2(2) n2(3) n2(4)];
z2=[n3(2) n3(3) n3(4)];
%Ahora un giro de teta2 con respecto al eje y
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta2/2)*y2;
Q = [cos(teta2/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta2/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Qfunction [x4 ,y4 ,z4]=Rotacion3D_q2(x,y,z,teta3,teta2,teta)
%Grafica vector en 3D, x y z representan los vectores desde donde empieza el movimiento ..teta3,teta2,teta (en �) representan los angulos alrededor de los ejes X,Y,Z de la IMU
teta3=(teta3*2*pi)/360;
teta2=(teta2*2*pi)/360;
teta=(teta*2*pi)/360;
%OPERADOR ROTACION CUATERNION v�=q*v*r (r=q^-1)
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta/2)*z;
Q = [cos(teta/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
d1=[0 x(1) x(2) x(3)];
d2=[0 y(1) y(2) y(3)];
d3=[0 z(1) z(2) z(3)];
n1 = quatmultiply(Q,d1);
n1 = quatmultiply(n1,R);
n2 = quatmultiply(Q,d2);
n2 = quatmultiply(n2,R);
n3 = quatmultiply(Q,d3);
n3 = quatmultiply(n3,R);
x2=[n1(2) n1(3) n1(4)];
y2=[n2(2) n2(3) n2(4)];
z2=[n3(2) n3(3) n3(4)];
%Ahora un giro de teta2 con respecto al eje y
%VECTOR SOBRE EL QUE GIRO b multiplicado por sin(angulo que giro/2)
b=sin(teta2/2)*y2;
Q = [cos(teta2/2) b(1) b(2) b(3)];%Quaternion
R = [cos(teta2/2) -b(1) -b(2) -b(3)];%INVERSO del Quaternion Q
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1]杨傲.基于RGB-D与IMU融合的SLAM算法研究与实现[J].[2023-10-04].
[2]姚姗.基于GPS/IMU数据融合的车辆位姿控制方法研究[D].燕山大学[2023-10-04].
[3]阮凤立,安倩,王克己,等.室内定位中融合IMU的地图匹配算法研究与实现[J].数字通信世界, 2014(S2):4.DOI:10.3969/j.issn.1672-7274.2014.z1.003.