1.情景概述
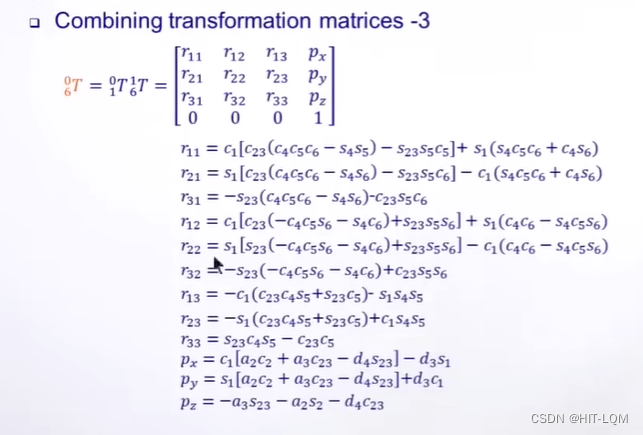
假设最一般的情况,我们的机械臂有六个自由度,那么从初始状态想要变化到目标的状态,一般情况下我们至少需要进行六次的变换,而这六次变换的矩阵参数隐含在整体的变换矩阵中。
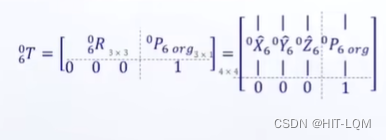
根据之前的知识,左上角的3*3代表了三个单位向量的转置,这九个数6个限制条件:模长为一、两两垂直,决定了有三个自由度。右上角的3*1代表了平移变换,共三个自由度。而我们6次的变换都有12个三角函数关系式,对应着6个未知数和6个限制条件,我们的目标就是为了求解这六个未知数。
2.求解概念

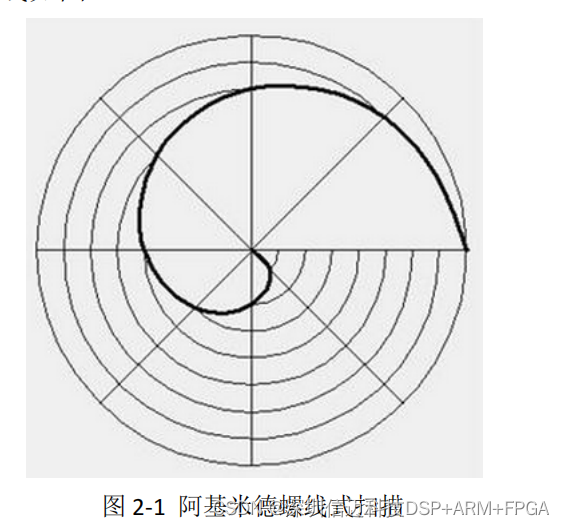
2.1Reachable workspace
机械臂可以用一种以上的姿态到达的位置,左图的同心圆以及右图的圆(不包括边界)。
2.2Dexterous workspace
机械臂可以用任何的姿态到达的位置,右图的中心点。
2.3Subspace
机械臂在定义头尾的变换矩阵T所能到达的变动范围
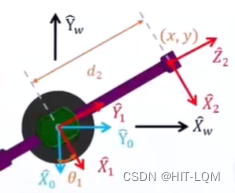
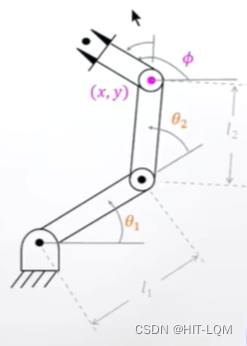
比如这个2自由度的机械臂,引入(x,y)坐标,那么他的T是固定的:
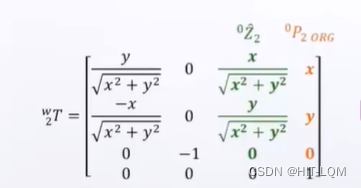
可以看到,如果(x,y)一定,那么实际上左边的角度也都是确定的;而且,所能到达的位置也是有限的,因为旋转矩阵的九个数字已经有五个数字是确定的,只有四个数字可以发生变化。
2.4多重解
很多时候,到达一个点有多种驱动的实现方式,举一个例子,PUMA(6 rotational joints)

针对特定的工作点,前三轴会对应四种姿态,而每种姿态,具有两种的手腕转动姿态,因此共有八组解。不难发现这些角度有如下的关系:
但是由于机械结构的限制,未必每组解都会成为可行解。
选择解的方式要考虑以下几点:
1.相对于目前状态最快实现
2.相对于目前状态最节能
3.可以躲避障碍物
3.求解方法
3.1解析法
解析法分为代数法或几何法。目前来讲设计的大多数手臂都存在解析解,而且为了便于求解,通常将后三个轴交于一点。
3.2数值法
3.3求解过程
下面我们来看一个例子,分析其求解过程。
我们已知的条件是(x,y,φ),目标是要求解(θ1,θ2,θ3),即:
已知: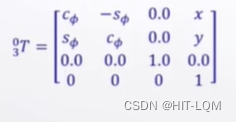 ,来求解
,来求解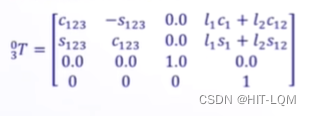
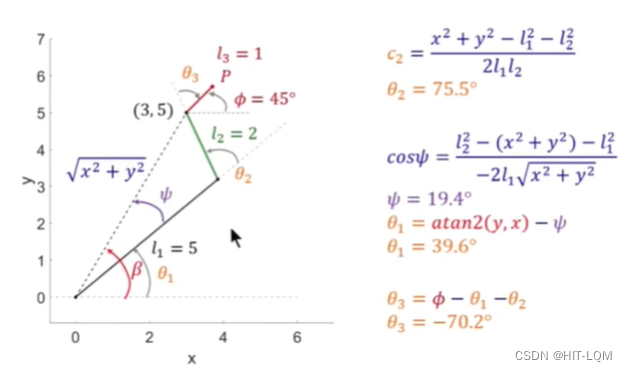
几何法:空间几何拆解成平面几何
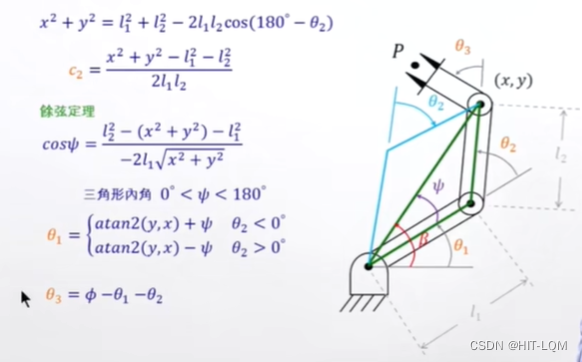
量化计算结果如下所示:
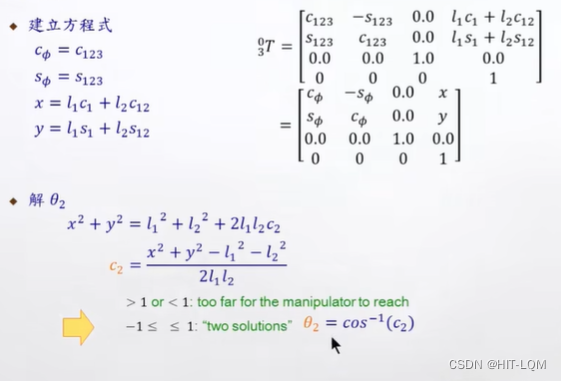
代数法:建立方程式
首先根据两个矩阵建立方程式,通过观察首先求解θ2,然后通过大小判断是否有解,有几组解:
其次将θ2带入方程式:

再进行变数变换:
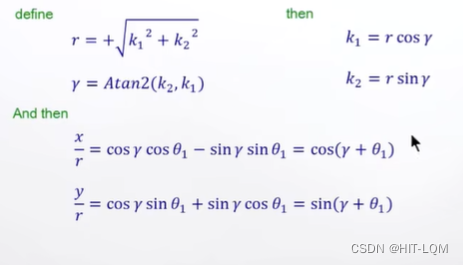
随后求解θ1:
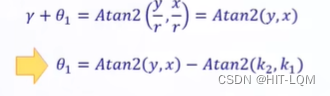
当我们的θ2选择不同的解,θ1也会跟着产生变化。
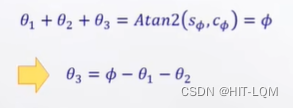
最后求解θ3:
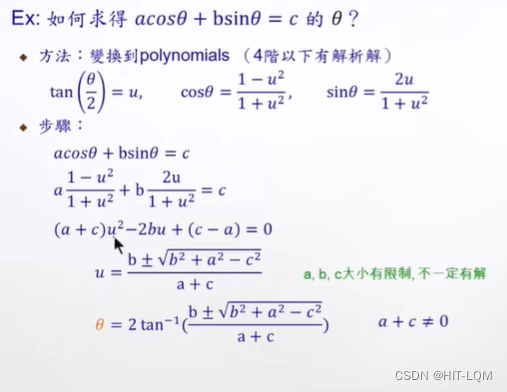
三角函数方程式的求解