原始 Markdown文档、Visio流程图、XMind思维导图见:https://github.com/LiZhengXiao99/Navigation-Learning
文章目录
- 一、GICI-LIB 简介
- 1、程序概述
- 2、资源获取
- 3、功能简介
- 4、代码分析
- 5、第三方库
- 6、manual
- 7、程序执行流程图
- 8、定位模式
- 1. GNSS
- 2. GNSS+ INS
- 3. GNSS + INS + Camera
- 4. Estimator 类型封装
- 二、GICI-LIB 编译
- 1、安装需要的库
- 1. 安装 Eigen
- 2. 安装 OpenCV
- 3. 安装 glfg、glog
- 4. 安装 Yaml-cpp
- 5. 安装 ceres-solver
- 2、GICI-LIB 编译
- 四、glog 日志系统
- 五、YMAL 配置文件
- 1、YAML 简介
- 2、读取 YAML 的语法
- 3、GICI-LIB 配置文件结构
- 4、示例配置文件
- 六、数据集
- 1、数据集介绍
- 2、非 ROS 方式使用数据集
- 3、把原始数据转为 rosbag
- 4、ROS 方式
- 5、结果评估
一、GICI-LIB 简介
作者的介绍:为了阐明 GNSS 的算法模型,加快在多源融合应用中针对 GNSS 的开发效率,我们开源了 GICI-LIB,并辅以详尽的文档和全面的数据集。GICI-LIB 以可扩展的设计理念,实现了GIC传感器之间多种形式的松紧组合。评估结果表明,GIC 系统能够在多种复杂环境下,提供分米到米级的高精度导航。
1、程序概述
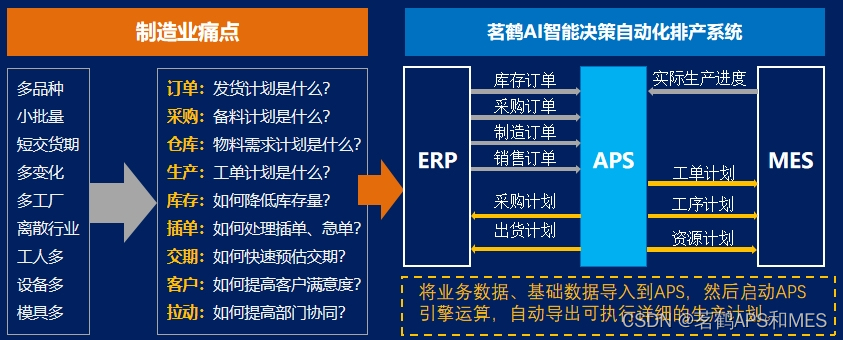
GICI-LIB 全称 GNSS/INS/Camera Integrated Navigation Library,是上海交大最新开源的一套基于图优化的 GNSS+INS+Camera 集成导航定位库。基于 RTKLIB 处理 I/O 流、编解码;基于 OKVIS 因子图优化类型封装;基于 SVO 做特征提取。以 GNSS 为主,再加入 INS、Camera 做组合,支持相当多的数据格式、定位模式,包含很多 GNSS 因子、惯导因子、视觉因子及运动约束。以处理实时数据为主,后处理也采用模拟实时数据处理的方式进行。典型的应用方式如下图:

2、资源获取
- 论文:GICI-LIB: A GNSS/INS/Camera Integrated Navigation Library,可以在这下载
- 源码:https://github.com/chichengcn/gici-open
- 数据:https://github.com/chichengcn/gici-open-dataset
- manual 的参考论文:
- Keyframe-based visual–inertial odometry using nonlinear optimization,下载
- SVO: Semidirect visual odometry for monocular and multicamera systems,下载
- Ionospheric time-delay algorithm for single-frequency GPS users,下载
- GPS meteorology: Mapping zenith wet delays onto precipitable water,下载
- Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data,下载
- Features from Accelerated Segment Test ( FAST ),下载
- An iterative image registration technique with an application to stereo vision,下载
- On-manifold preintegration for real-time visual–inertial odometry,下载
- MLAMBDA: A modified LAMBDA method for integer least-squares estimation,下载
3、功能简介
-
支持非 ROS 模式和 ROS 模式,ROS 模式下可以使用 ROS 话题、RVIZ 显示轨迹。
-
支持多种数据形式:serial 串口、TCP/IP server、TCP/IP client、Ntrip server、Ntrip client、V4L2、file 文件。
-
支持多种数据编码:RTCM2、RTCM3、 Ublox raw、Septentrio raw、Tersus raw、NMEA、DCB file、ATX file、V4L2 image pack、GICI image pack、GICI IMU pack
-
支持多种数据传输方式:I/O 端口、串口、ROS topics、TCP/IP、NTRIP、V4L2、文件
-
支持多种定位模式:SPP、SDGNSS、DGNSS、RTK、PPP、SPP-based LC GINS、TC GINS、RTK-based LC GINS、SRR GVINS、RRR GVINS。
-
支持多种因子:
- GNSS 松组合因子:Position Error Factor、Velocity Error Factor
- GNSS 紧组合因子:Pseudorange Error Factors、Carrier Phase Error Factors、Doppler Error Factors
- Camera 因子:Reprojection Error Factor
- INS 因子:Pre-integration Factors、Zero Motion Update Factor、Heading Measurement Constraint Factor、Non-holonomic Constraint Factor
- 公共因子:Parameter Error Factors、Relative Constant Error Factors、Relative Integral Error Factors
-
支持三个层级的 SSR 服务:
- 一级:提供精密星历、精密钟差、码偏差。
- 二级:除一级改正信息外,还提供载波相位偏差。
- 三级:除二级改正信息外,还提供大气延迟信息,能够支持 PPP-AR、PPP-RTK。
-
GICI 不支持时间系统偏差的估计,需要进行硬件层面的时间对准,且最好精度要达到 5ms。
4、代码分析
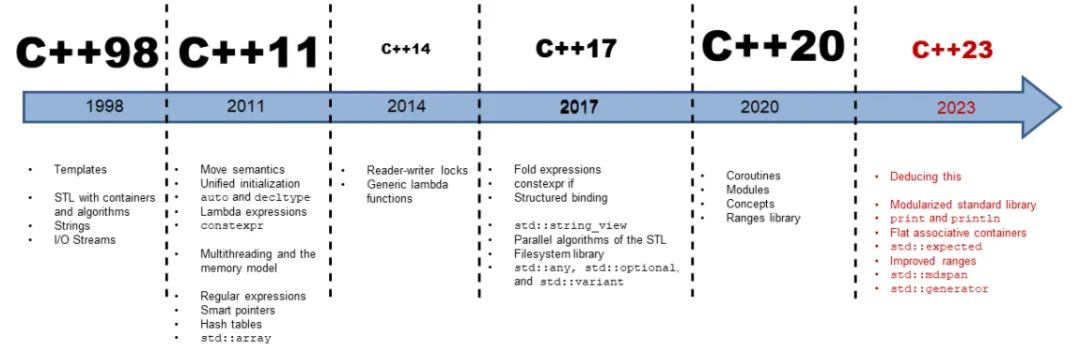
GICI-LIB 主要使用 C++ 编写,且大量使用 C++ 高级语法,CMake 文件里规定以 C++11 的标准编译,采用多线程、面向对象程序设计方法,写法"很C++",想看懂源码需要有一定的 C++ 基础。C++11 语法的内容可以看下图:
具体来说,还有以下特点:
- 程序面向对象设计,大量使用继承、多态、友元、虚函数等面向对象特性。
- 大量使用模板泛型技术,用了很多 STL 容器、迭代器,用了
std::function、std::bind。 - 大量使用智能指针管理内存,还用 using 给智能指针起别名 xxxPtr。
- 使用多线程技术,接受数据和解算由不同的线程来做。
- 比较友好的地方是代码的注释还算完善,基本每个文件开头、每个函数、程序的关键代码段都有注释。
- 代码质量很高,但还可以再整理整理,比如有的紧挨着的地方上面用了 auto 而下面没用、有些函数名太长、构造函数写太长、streamer 和 estimator 线程有好几种命名,看着有点乱。
用 cloc 统计 include、src、tools 文件夹代码量,结果如下:
| 语言 | 文件数 | 空行 | 注释行 | 代码行 |
|---|---|---|---|---|
| C++ | 110 | 3704 | 4547 | 26189 |
| C/C++ Header | 104 | 2746 | 4841 | 8452 |
| MATLAB | 16 | 111 | 232 | 666 |
| C | 10 | 98 | 93 | 394 |
| CMake | 9 | 71 | 36 | 262 |
| YAML | 4 | 8 | 17 | 185 |
| Gencat NLS | 13 | 0 | 0 | 94 |
| XML | 2 | 8 | 0 | 56 |
| 总计 | 268 | 6746 | 9766 | 36298 |
src 和 tools 文件夹内各子文件夹功能信息如下表所示:
| 文件名 | 功能 | 代码行数 |
|---|---|---|
| estimate | 因子图优化相关类型、函数 | 2451 |
| fusion | 多源融合导航相关:估计器、初始化器类型定义 | 2872 |
| gnss | GNSS相关:误差改正、模糊度固定、SPP、PPP、RTK | 9347 |
| imu | IMU相关:数值更新、误差改正 | 1725 |
| stream | 数据流相关、Node处理相关类型定义 | 2829 |
| utility | 全局变量、配置选项、信号处理函数、 Spin线程定义 | 1159 |
| vision | 视觉相关:初始化、特征提取、处理、跟踪、相对位置计算 | 1900 |
| conversions | 时间转换、坐标转换 | 175 |
| edit_binary | 二进制数据处理、处理采样间隔 | 1137 |
| evaluation | NMEA相关 | 1672 |
| ros | ros 相关、话题消息发布、msg定义 | 2149 |
| matlab_plot | MATLAB 画图脚本 | 666 |
5、第三方库
- RTKLIB:开源 GNSS 软件包,由一个程序库和多个应用程序工具库组成。
- fast:Features from Accelerated Segment Test,特征检测算法。
- svo:半直接发法稀疏直接法视觉里程计(Visual Odometry)算法,用到其中函数做视觉前端
- OKVIS:Open Keyframe-based Visual-Inertial SLAM,用到了其中的因子图函数
- Eigen:线性代数库,用于处理矩阵和向量的计算,它提供了许多线性代数运算的功能,包括矩阵运算、向量运算、特征值分解、奇异值分解、矩阵求逆等。
- Ceres:Google 的非线性最小二乘库,用于实现因子图优化解算。
- glog:Google 的日志库。
- OpenCV:Open Source Computer Vision Library,跨平台计算机视觉库。
- yaml-cpp:GICI 采用 YAML 配置文件格式,YAML-CPP 是一个 C++ 的 YAML 库,用于 yaml 格式的解析和生成。
6、manual
GICI-LIB 的 manual 足足有 117 面,挺详细的,内容如下:
- 1~2:对软件简单介绍。
- 3~5:软件编译,下文会对每个步骤详细展开介绍。
- 5~39:介绍配置文件格式,下文会做总结,具体设置看文档。
- 40~45:介绍常见使用场景及配置,内容主要就是本文开头的图。
- 47~58:硬件设置:输入数据方式和格式、ROS 系统、硬件时间同步。
- 60~64:介绍因子图优化基本模型,下文会详细展开描写。
- 62~98:介绍各种因子。
- 98~110:介绍各种定位模式,下文会简单概括,详细的公式还是要看文档和代码。
- 111~113:坐标系框架定义和转换,多源融合涉及很多的坐标系,各种坐标系的统一至关重要。值得注意的是:导航坐标系(n 系)用ENU(东北天)、载体坐标系(b 系)用RFU(右前上)。
- 114~115:GNSS 线性组合和差分模型。
- 116:参考文献,上文已经给出下载链接。
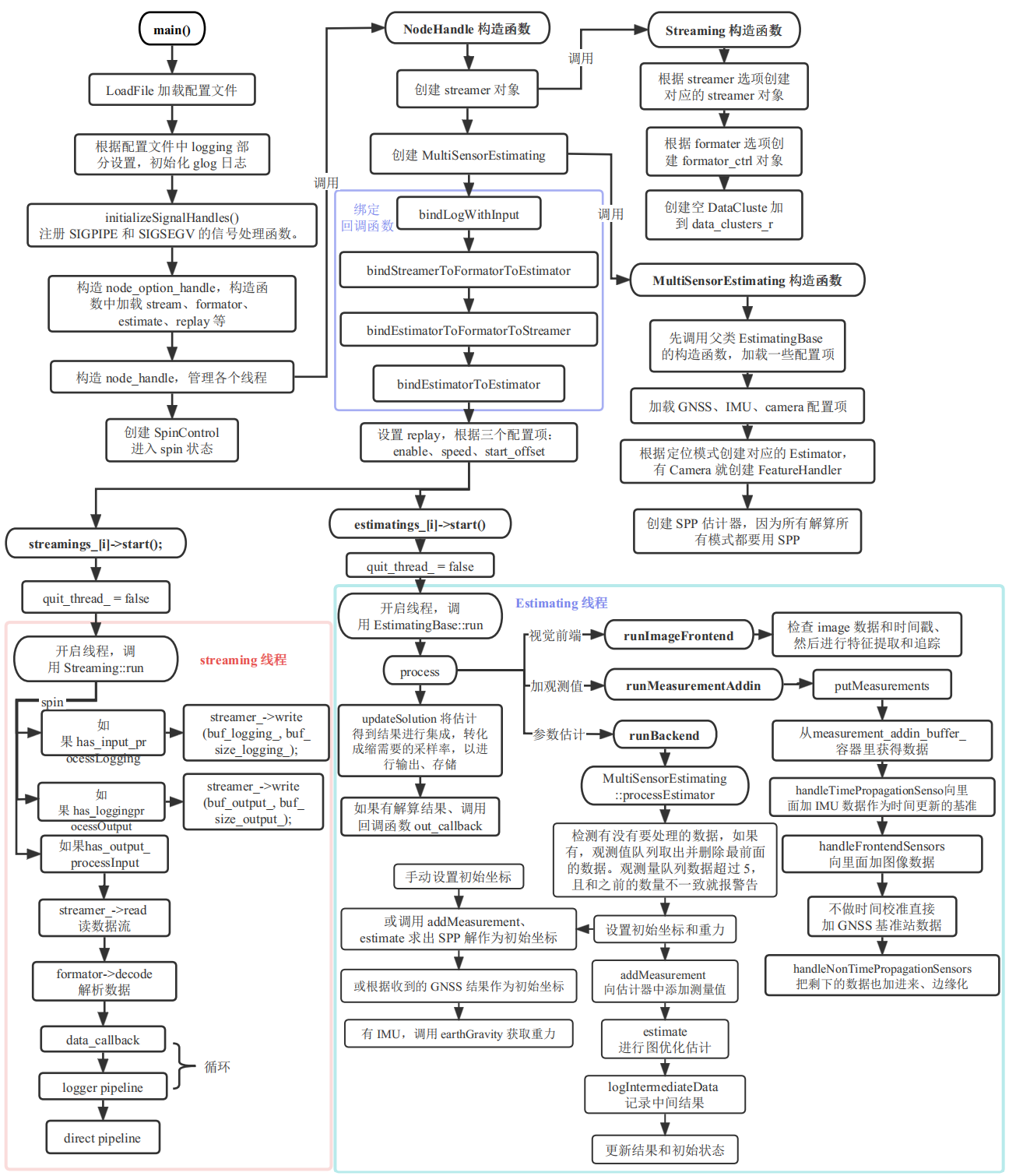
7、程序执行流程图
8、定位模式
1. GNSS

- Single Point Positioning(SPP):用单历元的伪距、多普勒测量值,解算接收机的位置、速度、钟差。只实现了单频非差伪距的 SPP,没做消电离层,因为多频组合要额外估计 IFB,模型复杂的同时也提高不了多少 SPP 的精度。
- Real-Time Differential(RTD):用单历元的双差伪距、非差多普勒测量值,解算接收机位置、速度。RTD 中可以很方便的使用多频观测值,因为 IFB 在双差中被大大消除,可以通过更改配置文件中 estimator 节点的输入项来设置。
- Real-Time Kinematic(RTK):用多历元的双差伪距,双差载波,非差多普勒观测值,计算接收机位置、速度。估计了单差模糊度,如果有 m 颗共视卫星、n 个共同频率,需要估计 m × n m \times n m×n 个单差模糊度。除了图优化估计,RTK 还有模糊度固定的步骤,GICI-LIB 支持部分模糊度固定。
- Precise Point Positioning(PPP):使用非差的伪距、载波、多普勒观测值,估计接收机速度、位置、钟差、大气延迟、IFB。GICI-LIB 支持 PPP-AR,但没有完全测试,由于 PPP 比 RTK 浮点解的噪声更大,想固定必须要有偏差产品,并进行改正。
- Global Frame Initialization:纯 GNSS 解算在 ECEF 框架进行,而进行组合需要在 ENU 框架进行,因此需要进行转换。全局框架初始化定义一个基准点,用于将 ECEF 框架中的状态转换为 ENU 框架中的状态。基准点也可用于计算重力加速度,用于惯导惯导。设置基准点有两种方法:
- 我们运行 SPP 估计,将基准点设置为该估计的第一个有效解。
- 如果将
force initial global position选项设置为 true,我们通过initial global position选项从配置文件中加载点坐标。
2. GNSS+ INS
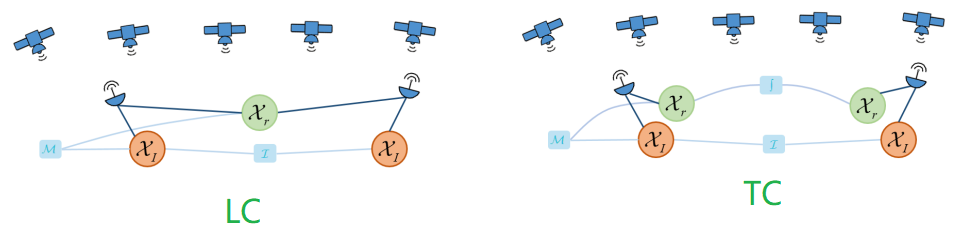
- Loosely Integration(LC):GNSS/INS 松组合用 GNSS 解算结果(位置、速度),和 INS 的原始数据(比力、角增量)进行组合解算。
- Tightly Integration(TC):GNSS/INS 紧组合用 GNSS 的原始数据(伪距、载波、多普勒),和 INS 的原始数据(比力、角增量)进行组合解算。
- Initialization:GNSS/INS 初始化会估计速度、位置和偏差;为了提高效率,无论松紧组合都使用松组合的方程。先用加速度计比力量测值计算俯仰角和横滚角,当有足够比力量测值之后再对航向角进行估计,因子图结构与松组合一致,不同的是,我们使用多普勒来计算初始位置的增量,因为初始位置噪声过大,而多普勒噪声较低。
3. GNSS + INS + Camera
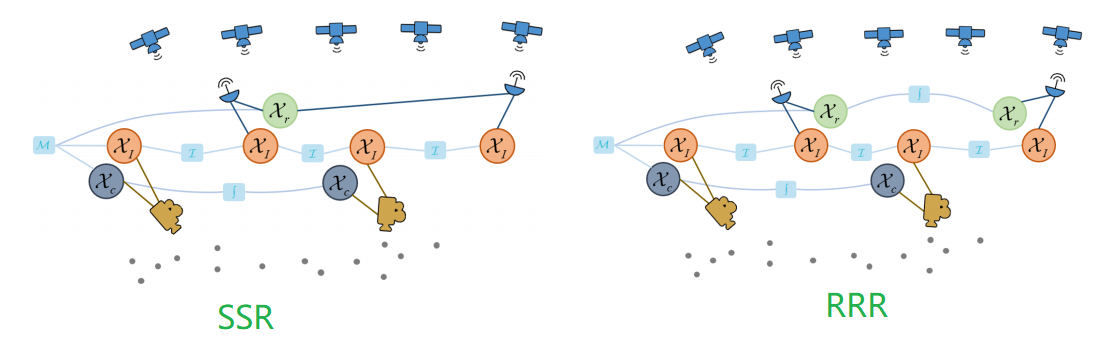
摄像机状态之间没有相互联系,因为相应的参数是时变的。我们在图中保留了连接,以表示由于跟踪地标的切换,各次的估计参数会发生变化。
- Solution/Raw/Raw Integration(SRR):SRR 采用 GNSS 的解算结果(速度、位置),和 INS 的原始数据(比力、角增量),以及 Camera 数据(特征点),进行组合解算。
- Raw/Raw/Raw Integration(RRR):RRR 采用 GNSS 的原始数据(伪距、载波、多普勒),和 INS 的原始数据(比力、角增量),以及 Camera 数据(特征点),进行组合解算。
- Initialization:GNSS/INS/Camera 初始化位置、速度、偏差、特征点位置。分两步进行,先进行 GNSS/INS 初始化,再通过空间交汇对特征点追踪。
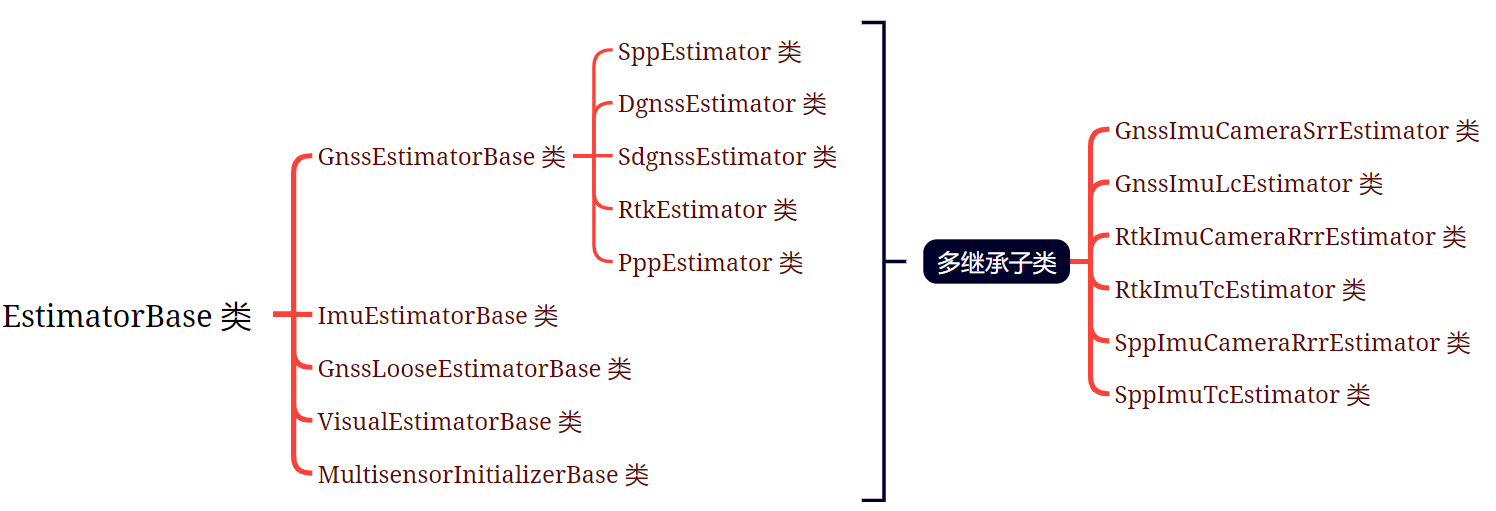
4. Estimator 类型封装
GICI-LIB 提供的多种传感器在不同定位模式下的很多因子,并封装了一个基类,为所有传感器提供基础的函数去操作变量因子和量测因子,具体可以看各种 xxx_estimator_base.h,看算法的时候肯定重点要看这些文件。
二、GICI-LIB 编译
git clone下载不了,可以去git clone后面的网站上手动下载。本文只介绍非 ROS 版。
我使用的环境是 VSCode + WSl,很多导航定位的开源软件都基于 Linux,比起虚拟机,VSCode + WSl 要流畅一些,不熟悉的推荐看这篇文章。
确保之前已经配置好 C++ 环境(g++、Cmake、VScode 插件)。
看别人的博客,都提到了曾经安装过 glog/gflag 会出问题:GICI-OPEN多源融合导航框架编译及问题说明
构建、编译的时候找不到库,可能是因为库装到
/usr/local/lib里了,试试创建软链接到/usr/libln -s /usr/local/lib/库名.a /usr/lib/库名.a
1、安装需要的库
1. 安装 Eigen
sudo apt-get install libeigen3-dev
2. 安装 OpenCV
-
文件下载
- OpenCV:https://opencv.org/releases/,下载太慢可以去:https://www.raoyunsoft.com/wordpress/index.php/2020/03/09/opencvdownload/
- 下载opencv_contrib(与 OpenCV 版本一致):https://opencv.org/releases/
- 两个都下载好以后,把opencv_contrib放到解压后opencv文件夹里面
-
环境配置
sudo apt-get install cmake git libgtk2.0-dev pkg-config libavcodec-dev libavformat-dev libswscale-dev sudo apt-get install python-dev python-numpy libtbb2 libtbb-dev libjpeg-dev libpng-dev libtiff-dev libjasper-dev libdc1394-22-dev -
进入 opencv 目录编译安装
cd opencv mkdir build cd build sudo cmake -D CMAKE_BUILD_TYPE=Release -D CMAKE_INSTALL_PREFIX=/usr/local .. sudo make -j8 sudo make install -
将 OpenCV 的库添加到路径,从而可以让系统找到
sudo vim /etc/ld.so.conf.d/opencv.conf 在文件中加上并保存退出 /usr/local/lib sudo ldconfig -
配置 bash
sudo vim /etc/bash.bashrc # 在打开的文件最末尾添加以下代码并保存退出 PKG_CONFIG_PATH=$PKG_CONFIG_PATH:/usr/local/lib/pkgconfig export PKG_CONFIG_PATH source /etc/bash.bashrc -
执行
pkg-config --cflags opencv如果报错,可以看博客
3. 安装 glfg、glog
参考:Ubantu下glog编译安装与使用简介
-
下载 glfg
git clone https://github.com/gflags/gflags -
进入 glfg 目录编译安装
cd glfg mkdir build cd build/ cmake -DBUILD_SHARED_LIBS=ON -DBUILD_STATIC_LIBS=ON -DINSTALL_HEADERS=ON -DINSTALL_SHARED_LIBS=ON -DINSTALL_STATIC_LIBS=ON -DCMAKE_INSTALL_PREFIX=/usr/ .. make sudo make install -
下载 glog
git clone https://github.com/google/glog -
进入 glog 目录编译安装
cd glog mkdir build cd build cmake -DGFLAGS_NAMESPACE=google -DCMAKE_CXX_FLAGS=-fPIC -DBUILD_SHARED_LIBS=ON -DCMAKE_INSTALL_PREFIX=/opt/glog .. make sudo make install -
为使 glog 库生效,需要在
/etc/ld.so.conf.d下新建配置文件并使其生效cd /etc/ld.so.conf.d sudo vim glog.conf 输入 /opt/glog/lib sudo ldconfig
4. 安装 Yaml-cpp
-
下载
git clone https://github.com/jbeder/yaml-cpp.git -
进入 Yaml-cpp 目录编译安装
cd yaml-cpp mkdir build cd build cmake -D BUILD_SHARED_LIBS=ON .. make -j16 sudo make install
5. 安装 ceres-solver
-
下载
git clone https://ceres-solver.googlesource.com/ceres-solver -
进入 ceres-solver 目录编译安装
mkdir ceres-bin cd ceres-bin cmake ../ceres-solver-2.1.0 make -j3 make test make install
2、GICI-LIB 编译
-
下载
git clone https://github.com/chichengcn/gici-open -
编译
在工程目录下打开终端,输入以下命令:
mkdir build cd build cmake .. make -j4 # 编译需要一段时间
四、glog 日志系统
glog 即 Google Log ,是一个 Google 开源的日志库,它提供了一个轻量级的、可扩展的、跨平台的日志系统。 glog 的用法包括:
-
引入头文件:需要包含 glog 的头文件:
include <glog/logging.h> -
初始化库:在开始使用 glog 之前, 初始化库,例如:
google::InitGoogleLogging(argv[0]) -
配置日志:可以通过配置文件或代码来配置 glog 的参数,例如:
google::SetLogDestination(LOG_TO_FILE, "/path/to/logfile.log") -
输出日志:使用
LOG(level)宏函数来输出日志。level表示日志的严重程度,可以是以下几个级别之一:INFO:一般信息、WARNING:警告信息、ERROR:错误信息、FATAL:致命错误信息,输出后会终止程序。例如输出一般信息:LOG(INFO) << "This is an informational message." -
条件输出日志:使用
LOG_IF()、LOG_EVERY_N()和LOG_FIRST_N()宏函数来条件输出日志。例如:LOG_IF(INFO, num_cookies > 10) << "Got lots of cookies" -
关闭日志:在程序结束之前,关闭 glog:
google::ShutdownGoogleLogging()
五、YMAL 配置文件
在手册的 9~39 面,详细的介绍了配置文件的具体内容。GICI-LIB 采用 YAML 配置文件格式,下面先对 YMAL 做个简单介绍。
1、YAML 简介
链接时找不到 yaml-cpp,可以参考博客:error while loading shared libraries的解决方案,在
/etc/ld.so.conf文件中加上/usr/local/lib
YAML(YAML Ain’t Markup Language)是一种轻量级的数据序列化格式,可以用于配置文件、数据交换、API请求等多种场景。它是一种简单易用的数据序列化格式,使得数据可以以人类可读的方式进行存储和传输。YAML的语法非常简单,它使用缩进和符号来表示数据结构。以下是一些YAML的基本语法:
-
字符串:用引号括起来的文本,例如:“hello world”。
-
数字:没有引号的数字,例如:42。
-
布尔值:用 true 或 false 表示的真或假。
-
缩进:YAML使用缩进来表示嵌套关系,每个缩进级别用空格数表示。例如,下面的代码段表示一个包含两个列表的字典:
-
字典/对象/键值对:用短横线
-或中括号[]表示的键值对的集合。例如:{name: John, age: 30}或- name: John age: 30。多层对象可表示为:key: {key1: value1, key2: value2}或者
key: key1: value1 key2: value2 -
数组/列表:用短横线
-或中括号[]表示的值的列表。例如:[apple, banana, orange]或- apple - banana - orange。复杂一点的如:streamers: - streamer: tag: str_gnss_rov output_tags: [fmt_gnss_rov] type: file path: <data-directory>/gnss_rover.bin - streamer: tag: str_gnss_ref output_tags: [fmt_gnss_ref] type: file path: <data-directory>/gnss_reference.bin -
引用:
&用来建立锚点,<<表示合并到当前数据,*用来引用锚点。 -
注释:在YAML中,使用
#表示注释。
YAML 需要特别注意的几个点:
- 大小写敏感。
- 缩进不允许使用 tab,只允许空格。
- 缩进的空格数不重要,只要相同层级的元素左对齐即可。
2、读取 YAML 的语法
-
YMAL 在 C++ 中以 Node 类表示。
-
LoadFile():从文件中加载 YAMl 到 C++ 中 Node 对象:
yaml_node = YAML::LoadFile(文件名); -
[]:Node 对象可以理解为是树形的,用中括号可以取出里面的子数,创建一个新的 Node 对象:
YAML::Node logging_node = yaml_node["logging"]; -
safeGet():第一个参数为 Node,第二个参数为关键字,判断配置文件的 Node 里有没有你要的那个关键字,有的话再把对应的值作为第三个参数返回。
option_tools::safeGet(logging_node, "log_to_stderr", &FLAGS_logtostderr); -
checkSubOption():第一个参数为 Node、第二个参数为子配置选项,检查参一中是否存在参二子配置选项,如果不存在有两种处理:
- 当参三为 true 时,LOG(FATAL) 退出程序。
- 当参三为 false 时,LOG(INFO) 输出错误到日志文件。
下面三个函数都是写了函数模板,然后重载写了很多的 :
- convert():参一传入 YAML 配置种类字符串,转换成 StreamerType、FormatorType 等枚举值作为参二返回。
- sensorType():传入 formator_role 字符串,转换成传感器种类枚举值 SensorType 返回。
- loadOptions():参一传入文档 18~39 对应 estimate 的选项 Node,转换成对应的 ImuParameters、AmbiguityResolutionOptions 等选项结构体作为参二返回。
3、GICI-LIB 配置文件结构
配置文件以 数组 + 键值对 的方式组织,每一个键值对都是一个配置项,用多级数组来分模块组织配置项键值对。有三大模块:stream、estimate、logging,其中 stream 模块内还分为三个子模块 steamers、formators、replay。如下图:
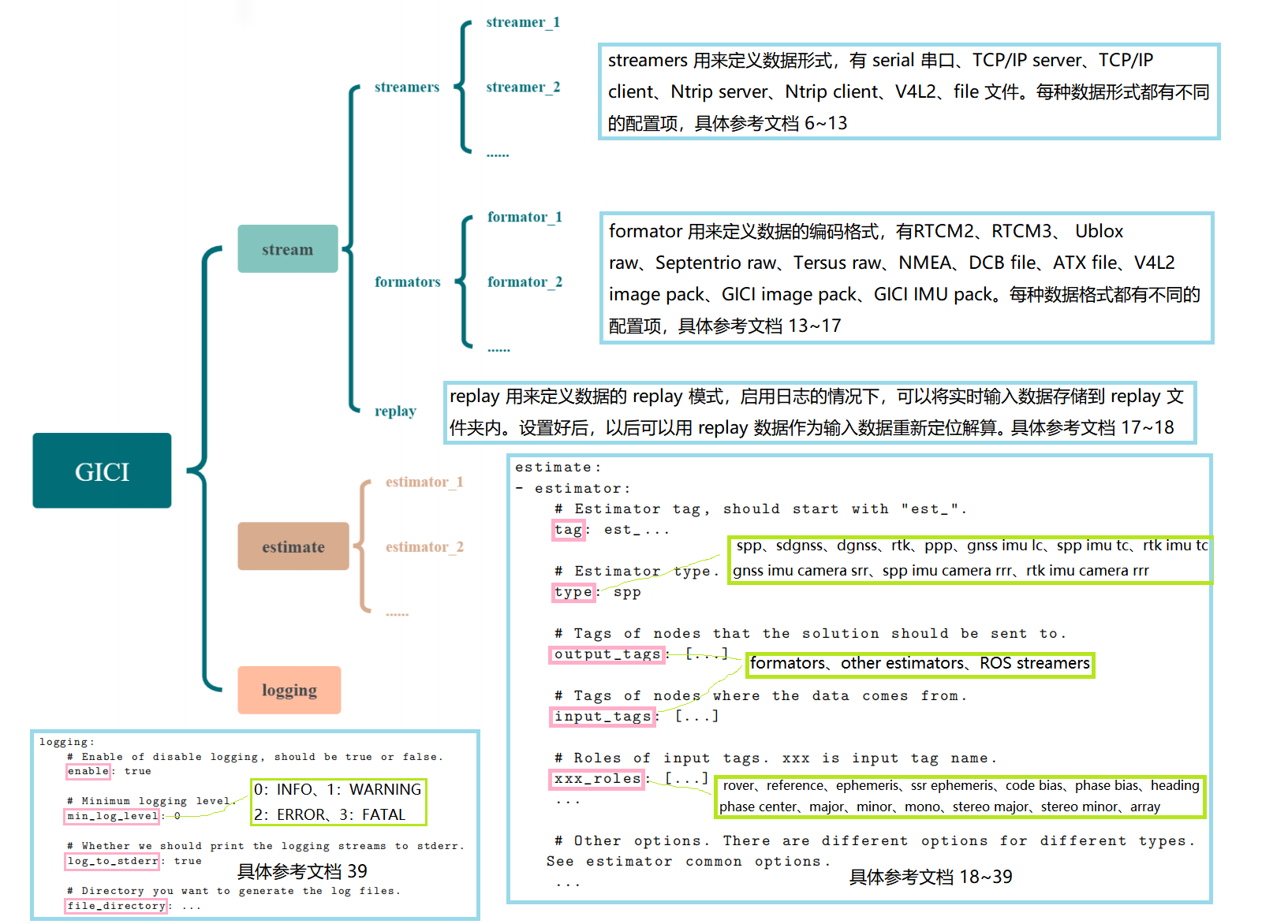
4、示例配置文件
option 文件夹里有一些配置文件,以伪实时定位解算为主,对应于下面的应用方式,图上每个模块都对应着咱们要配置的内容。

使用方式:
- 建立 data、output 文件夹,存放数据和输出。
- 将 yaml 配置文件中的
<data-directory>、<gici-root-directory>和<output-directory>分别换成你的数据文件夹路径、gici-open 文件夹的路径、和输出文件夹路径。 - 改配置中的
start_time,起始时间。 streamer写了两套,非 ROS 模式和 ROS 模式,想用哪套就把另一套注释掉。- 注意看
streamers里一项项streamer的路径项path,确保数据文件夹中都有对应的数据。 - 有些
streamer中路径设置在 option 文件夹中,程序会从gici-open 文件夹的路径找 option 文件夹,确保 option 文件夹和里面数据在对应位置,最好不要动 option 文件夹。 - 程序运行前,把 yaml 配置文件的路径加到命令行参数中。
- 结果在 output 文件夹下,
xxx_solution.txt文件可以直接用rtkplot打开查看结果。用matlab_plot里的脚本应该也行。
一定注意,配置文件中有好几处
<data-directory>、<gici-root-directory>、<output-directory>、start_time要改,不能漏,我在这卡了很久。没运行成功,仔细看看报错信息,INFO不用看,关注ERROR,看对应配置是否正确。
六、数据集
对 GitHub 上的介绍简单做个翻译
1、数据集介绍
- Github地址:https://github.com/chichengcn/gici-open-dataset
- 百度网盘下载:https://pan.baidu.com/share/init?surl=xZS-C_42LrGtUB0x6Bw_0A&pwd=6ncd,提取码:6ncd
作者专为开发 GICI-LIB 而搭建的数据采集的平台如下图所示:
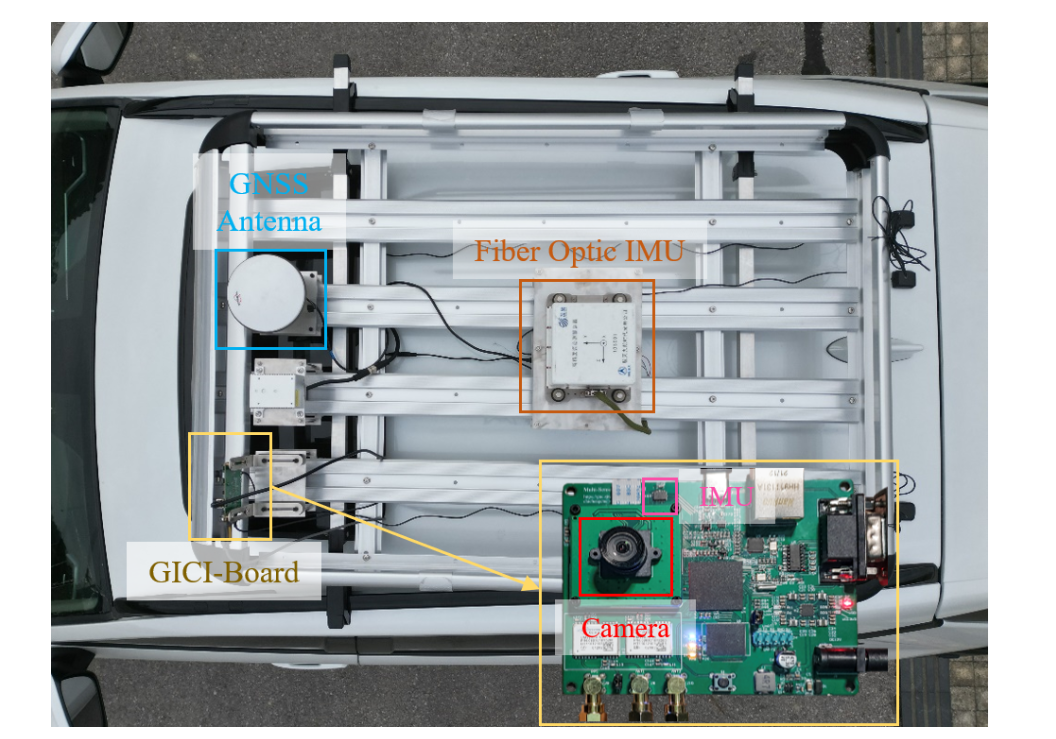
开发了一块 GICI 板,用于收集 IMU 和摄像头数据,并在整个平台中应用了与其他传感器同步的硬件。板载 IMU 和摄像头分别为博世 BMI088 和 Onsemi MT9V034。GNSS 接收器为 Tersus David30 多频接收器。我们还从千寻 SI 数据流中收集了参考站数据,用于 RTD 和 RTK ,并从国际 GNSS 服务(IGS)数据流中收集了状态空间表示(SSR)数据,用于 PPP。光纤 IMU 通过对其数据和 GNSS 原始数据进行后处理来提供参考值。
收集了两种数据集:不同场景的短期(几分钟)实验(1.1 ~ 4.3)和涵盖多个场景的长期(几十分钟)实验(5.1 ~ 5.2)。在短期实验中,我们将场景分为 4 类: 开阔天空、绿树成荫、典型城市和密集城市。对于每个场景,我们提供 2 ~ 3 条轨迹。在长期实验中,我们提供了在上海市中心收集到的涵盖这些场景的两个轨迹。
| ID | Scene | Size | Date | Scene View |
|---|---|---|---|---|
| 1.1 | Open-sky | 0.7 GB | 2023.03.20 | Images |
| 1.2 | Open-sky | 0.5 GB | 2023.03.27 | Images |
| 2.1 | Tree-lined | 1.4 GB | 2023.03.20 | Images |
| 2.2 | Tree-lined | 0.6 GB | 2023.03.27 | Images |
| 3.1 | Typical urban | 1.7 GB | 2023.03.27 | Images |
| 3.2 | Typical urban | 1.4 GB | 2023.03.27 | Images |
| 3.3 | Typical urban | 1.9 GB | 2023.03.27 | Images |
| 4.1 | Dense urban | 1.4 GB | 2023.05.21 | Images |
| 4.2 | Dense urban | 0.8 GB | 2023.03.27 | Images |
| 4.3 | Dense urban | 1.6 GB | 2023.03.27 | Images |
| 5.1 | Long-term | 8.2 GB | 2023.05.21 | Images |
| 5.2 | Long-term | 5.8 GB | 2023.05.21 | Images |
用对应数据的时候记得改时间
2、非 ROS 方式使用数据集
提供了各种 YAML 配置文件示例,在 <gici-root-directory>/option。请记住替换所有 <path> 和 "start_time"。通过命令来运行软件处理数据集:
./gici_main <gici-config-file>
要将实时输出流连接到 RTKLIB,应执行以下步骤:
- 指定 NMEA 格式的 TCP 服务器输出。配置示例见pseudo_real_time_estimation_RTK_RRR.yaml
- 在 Windows 计算机中打开 RTKPLOT。想要访问 Linux 计算机的 IP 地址,Windows 计算机必须位于同一网段。
- 单击文件->连接设置。启用 TCP 客户端。单击选项配置 TCP 客户端选项。填写服务器地址(Linux 计算机的 IP)和端口(在 GICI YAML 文件中配置)。
- 点击文件->连接,形成连接。然后就可以看到实时绘制的结果图了。
3、把原始数据转为 rosbag
我们提供了一个将 bin 文件转换为 rosbags 的工具,请参见 <gichi-root-directory>/tools/ros/gici_tools/src/gici_files_to_rosbag.cpp。其配置文件位于 <gici-root-directory>/tools/ros/gici_tools/option/convert_rosbags.yaml 中。请记住替换所有 <path> 和 "start_time"。
可以通过以下方式编译转换器:
cd \<gici-root-directory\>/tools/ros
catkin_make -DCMAKE_BUILD_TYPE=Release
然后可以通过以下方式运行转换器:
./devel/lib/gici_tools/gici_files_to_rosbag <config-file>
4、ROS 方式
YAML 配置文件示例,请参见 <gichi-root-directory>/ros_wrapper/src/gici/option。使用前要替换所有<path>和 "start_time"。在运行 ROS 可执行文件之前,请记得运行一个 roscore。然后,可以通过以下方式运行可执行文件:
rosrun gici_ros gici_ros_main <gici-config-file>
或者:
cd \<gici-root-directory\>/ros_wrapper
./devel/lib/gici_ros/gici_ros_main <gici-config-file>
之后,您可以通过以下方式播放从我们的 bin 文件转换而来的 rosbags
rosbag play <data1.bag> <data2.bag> <data3.bag> ...
为了实现可视化,您可以通过以下方式运行我们的 RVIZ 配置:
rviz -d \<gici-root-directory\>/ros_wrapper/src/gici/rviz/gici_gic.rviz
5、结果评估
我们为每个数据集提供 ground_truth.txt。参考数据采用光纤 IMU 的框架。在比较结果之前,您应该进行坐标转换。对于包含 IMU 的估计器,GICI 以 IMU 框架输出解决方案。我们提供将参考值转换为 IMU 框架的工具。首先要编译这个工具:
cd \<gici-root-directory\>tools/evaluation/alignment
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8
cd \<gici-root-directory\>tools/evaluation/format_converters
mkdir build
cd build
cmake .. -DCMAKE_BUILD_TYPE=Release
make -j8
然后,您可以通过以下方法转换参考值:
\<gici-root-directory\>tools/evaluation/format_converters/build/ie_to_nmea ground_truth.txt
\<gici-root-directory\>tools/evaluation/alignment/build/nmea_pose_to_pose ground_truth.txt.nmea
nmea_pose_to_pose.cpp 中的默认设置是将姿势从光纤 IMU 帧转换为数据集的 IMU 帧。如果您有其他要求,应修改 nmea_pose_to_pose.cpp 中的参数。现在,您将获得以 NMEA 格式转换的参考值文件 ground_truth.txt.nmea.transformed。为了便于可视化,您可以通过以下方法将该文件转换为 TUM 格式
\<gici-root-directory\>tools/evaluation/format_converters/build/nmea_to_tum ground_truth.txt.nmea.transformed
还可以将 GICI NMEA 输出转换为 TUM 格式,然后用任何软件进行比较。
对于纯 GNSS 估计器,GICI 以 GNSS 天线框架输出解决方案。您应进一步将参考值转换为 GNSS 天线,方法是
\<gici-root-directory\>tools/evaluation/alignment/build/nmea_pose_to_position ground_truth.txt.nmea.transformed
现在您会得到一个参考值文件 ground_truth.txt.nmea.transformed.translated。然后就可以继续上面的操作了。
nd_truth.txt.nmea
nmea_pose_to_pose.cpp 中的默认设置是将姿势从光纤 IMU 帧转换为数据集的 IMU 帧。如果您有其他要求,应修改 nmea_pose_to_pose.cpp 中的参数。现在,您将获得以 NMEA 格式转换的参考值文件 ground_truth.txt.nmea.transformed。为了便于可视化,您可以通过以下方法将该文件转换为 TUM 格式
```bash
\<gici-root-directory\>tools/evaluation/format_converters/build/nmea_to_tum ground_truth.txt.nmea.transformed
还可以将 GICI NMEA 输出转换为 TUM 格式,然后用任何软件进行比较。
对于纯 GNSS 估计器,GICI 以 GNSS 天线框架输出解决方案。您应进一步将参考值转换为 GNSS 天线,方法是
\<gici-root-directory\>tools/evaluation/alignment/build/nmea_pose_to_position ground_truth.txt.nmea.transformed
现在您会得到一个参考值文件 ground_truth.txt.nmea.transformed.translated。然后就可以继续上面的操作了。