关键词:windows docker tensorRT Ultralytics YoloV8
配置开发环境的方法:
1.Windows的虚拟机上配置:
Python3.10
使用Ultralytics 可以得到pt onnx,但无法转为engine,找不到GPU,手动转也不行,找不到GPU。这个应该是需要可以支持硬件虚拟化的GPU,才能在虚拟机中使用GPU。
2.Windows 上配置:
Python3.10
Cuda 12.1
Cudnn 8.9.4
TensorRT-8.6.1.6
使用Ultralytics 可以得到pt onnx,但无法转为engine,需要手动转换。这个实际上是跑通了的。
3.Docker中的配置(推荐)
Windows上的docker
使用的是Nvidia配置好环境的docker,包括tensorflow,nvcc,等。
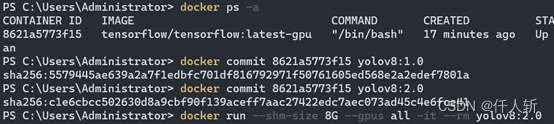
启动镜像:
docker run --shm-size 8G --gpus all -it --rm tensorflow/tensorflow:latest-gpu
在docker上安装libgl,Ultralytics等。
apt-get update && apt-get install libgl1
pip install ultralytics
pip install nvidia-tensorrt
然后进行提交,重新生成一个新的镜像文件:
如果不进行提交,则刚才安装的所有软件包,在重启以后就会丢失,需要重新再装一遍。
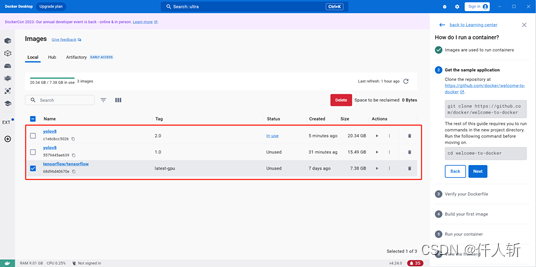
在docker desktop中可以看到所有的镜像
后续启动镜像可以使用
docker run --shm-size 8G --gpus all -it --rm yolov8:2.0
–shm-size 8G 一定要有,否则在dataloader阶段会报错,如下所示:

为了搜索引擎可以识别到这篇文章,将内容打出来:
RuntimeError: DataLoader worker (pid 181032) is killed by signal: Bus error. It is possible that dataloader’s workers are out of shared memory. Please try to raise your shared memory limit
更加详细的介绍,可以参考:https://blog.csdn.net/zywvvd/article/details/110647825
新生成的镜像,可以进行打包,在离线环境中使用。
docker save yolov8:2.0 |gzip > yolov8.tar.gz
将生成的镜像拷贝到离线环境,
docker load < yolov8.tar.gz
ultralytics 快速上手
参考:https://docs.ultralytics.com/modes/
官网的介绍很详细,按照指引,基本上可以配置成功。
模型训练:
def train():
#model = YOLO("yolov8n.yaml") # build a new model from scratch
model = YOLO("yolov8n.pt") # load a pretrained model (recommended for training)
model.train(data="coco128.yaml", epochs=3,batch=8) # train the model
metrics = model.val() # evaluate model performance on the validation set
#results = model("https://ultralytics.com/images/bus.jpg") # predict on an image
path = model.export(format="onnx") # export the model to ONNX format
模型转换:
def eval():
model = YOLO("best.pt") # load a pretrained model (recommended for training)
model.export(format="engine",device=0,simplify=True)
model.export(format="onnx", simplify=True) # export the model to onnx format
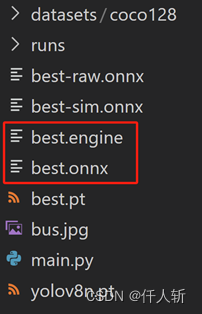
此时在目录下的文件如下:
当使用Ultralytics无法导出engine格式的文件时,需要使用tensorRT提供的trtexec进行转换。
事实上,在笔者的测试过程中,即使Ultralytics可以导出engine格式的模型,c++API的tensorrt也无法加载使用。即使python中和c++中使用的tensorRT的版本一致。
在windows平台下,我们可以使用如下的方法进行转换,可以写一个.bat脚本
@echo off
trtexec.exe --onnx=best.onnx --saveEngine=best.engine --fp16 --workspace=2048
:end
PAUSE
对于可变尺寸,需要
@echo off
trtexec.exe --onnx=best.onnx --saveEngine=best.engine --minShapes=images:1x3x640x640 --optShapes=images:8x3x640x640 --maxShapes=images:8x3x640x640 --fp16 --workspace=2048
:end
PAUSE
使用tensorrt加载engine文件进行推理
方法1:python
Python,需要安装pycuda
直接使用
pip install pycuda
进行安装。
def engineeval():
# 创建logger:日志记录器
logger = trt.Logger(trt.Logger.WARNING)
# 创建runtime并反序列化生成engine
with open("best.engine", "rb") as f, trt.Runtime(logger) as runtime:
engine = runtime.deserialize_cuda_engine(f.read())
# 创建cuda流
stream = cuda.Stream()
# 创建context并进行推理
with engine.create_execution_context() as context:
# 分配CPU锁页内存和GPU显存
h_input = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32)
h_output = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32)
d_input = cuda.mem_alloc(h_input.nbytes)
d_output = cuda.mem_alloc(h_output.nbytes)
# Transfer input data to the GPU.
cuda.memcpy_htod_async(d_input, h_input, stream)
# Run inference.
context.execute_async_v2(bindings=[int(d_input), int(d_output)], stream_handle=stream.handle)
# Transfer predictions back from the GPU.
cuda.memcpy_dtoh_async(h_output, d_output, stream)
# Synchronize the stream
stream.synchronize()
# Return the host output. 该数据等同于原始模型的输出数据
在调试界面,可以看到输入矩阵维度是1228800=13640*640
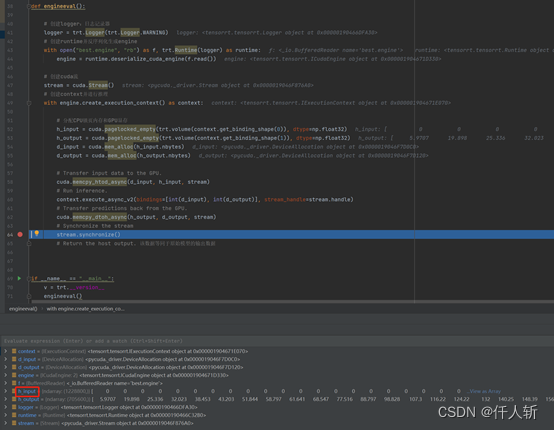
至于推理的精度,还需要传入实际的图像进行测试。这里就不在python环境下测试了。
方法2:c++
生产环境一般是c++,使用tensorrt c++ API进行engine文件的加载与推理,
参考:https://docs.nvidia.com/deeplearning/tensorrt/developer-guide/index.html#perform_inference_c
代码实现:
#include <iostream>
#include <fstream>
#include "NvInfer.h"
#include "cuda_runtime.h"
using namespace nvinfer1;
class Logger : public ILogger
{
void log(Severity severity, const char* msg) noexcept override
{
// suppress info-level messages
if (severity <= Severity::kWARNING)
std::cout << msg << std::endl;
}
};
int main()
{
Logger gLogger;
IRuntime* runtime = createInferRuntime(gLogger);
std::ifstream model("best.engine", std::ios::binary);
std::string modelString((std::istreambuf_iterator<char>(model)), std::istreambuf_iterator<char>());
ICudaEngine* engine =
runtime->deserializeCudaEngine(modelString.c_str(), modelString.length());
int nNum = engine->getNbBindings(); //获取绑定的数量
auto nDim0 = engine->getBindingDimensions(std::min(0, nNum - 1));
auto nDim1 = engine->getBindingDimensions(std::min(1, nNum - 1));
int nSize0 = nDim0.d[0] * nDim0.d[1] * nDim0.d[2] * nDim0.d[3];
int nSize1 = nDim1.d[0] * nDim1.d[1] * nDim1.d[2];
//都是浮点类型
auto dt0 = engine->getBindingDataType(0);
auto dt1 = engine->getBindingDataType(1);
auto name = engine->getName();
auto input = engine->getBindingName(0);
auto output = engine->getBindingName(1);
//准备输入输出空间
auto inputBuffer = new float[nSize0];
auto outputBuffer = new float[nSize1];
memset(inputBuffer, 0, nSize0 * sizeof(float));
memset(outputBuffer, 0, nSize1 * sizeof(float));
bool ret = false;
//创建执行上下文
IExecutionContext* context = engine->createExecutionContext();
//执行推理:拷贝到GPU->enqueueV3->拷贝回CPU
if(1)
{
void* buffers[2];
//Allocate GPU memory for Input / Output data
cudaMalloc(&buffers[0], nSize0 * sizeof(float));
cudaMalloc(&buffers[1], nSize1 * sizeof(float));
cudaStream_t stream;
cudaStreamCreate(&stream);
cudaMemcpyAsync(buffers[0], inputBuffer, nSize0 * sizeof(float), cudaMemcpyHostToDevice, stream);
context->setTensorAddress(input, buffers[0]);
context->setTensorAddress(output, buffers[1]);
ret = context->enqueueV3(stream);
if (!ret)
std::cout << "error" << std::endl;
cudaMemcpyAsync(outputBuffer, buffers[1], nSize1 * sizeof(float), cudaMemcpyDeviceToHost, stream);
cudaStreamSynchronize(stream);
cudaStreamDestroy(stream);
cudaFree(buffers[0]);
cudaFree(buffers[1]);
}
delete[]inputBuffer;
delete[] outputBuffer;
std::cout << "Done!" << std::endl;
context->destroy();
engine->destroy();
runtime->destroy();
return 0;
}
执行结果:
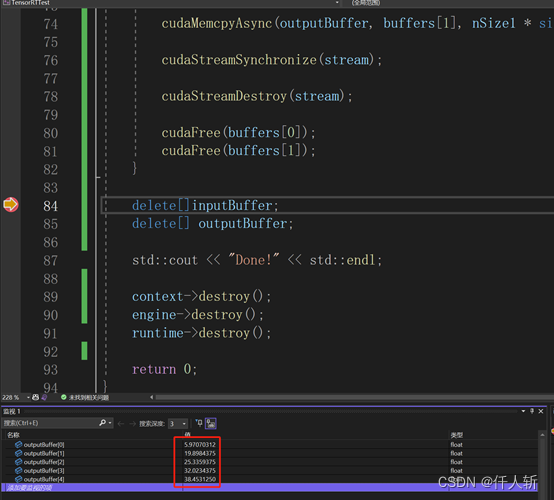
可以看到和python端是相同的。
然后可以做一些工程化的工作,比如对c++代码封装成为一个dll。后面还需要加一些前处理和后处理的步骤,将模型的结果进行解析。




![[React源码解析] React的设计理念和源码架构 (一)](https://img-blog.csdnimg.cn/75242141fe5646f2a123486823875d6a.png)