嵌入式Linux应用开发-驱动大全-同步与互斥①
- 第一章 同步与互斥①
- 1.1 内联汇编
- 1.1.1 C语言实现加法
- 1.1.2 使用汇编函数实现加法
- 1.1.3 内联汇编语法
- 1.1.4 编写内联汇编实现加法
- 1.1.5 earlyclobber的例子
- 1.2 同步与互斥的失败例子
- 1.2.1 失败例子1
- 1.2.2 失败例子2
- 1.2.3 失败例子3
第一章 同步与互斥①
1.1 内联汇编
要深入理解 Linux内核中的同步与互斥的实现,需要先了解一下内联汇编:在 C函数中使用汇编代码。
现代编译器已经足够优秀,大部分的 C代码转成汇编码后,效率都很高。但是有些特殊的算法需要我们手工优化,这时就需要手写汇编代码;或是有时需要调用特殊的汇编指令(比如使用 ldrex/strex实现互斥访问),这都涉及内联汇编。
实际上你完全可以不使用内联汇编,单独写一个遵守 ATPCS规则的汇编函数,让 C函数去调用它。但是在 C函数中写汇编代码,可以不用另外新建一个汇编文件,比较方便。
内联汇编的完整语法比较复杂,可以参考这 3篇文章:
① GNU C扩展汇编 https://gcc.gnu.org/onlinedocs/gcc/Extended-Asm.html
② ARM GCC 内嵌(inline)汇编手册 http://blog.chinaunix.net/uid-20543672-id-3194385.html
③ C内联汇编 https://akaedu.github.io/book/ch19s05.html
这 3章文章写得细致而深入,也有些难以理解。你跟着我们的视频或文档,就可以掌握到足够的知识。 下面举 3个例子说明汇编函数、用 C函数中使用内联汇编的方法。
1.1.1 C语言实现加法
使用 GIT下载后,源码在“07_驱动大全\source\01_inline_assembly\01_c_code\main.c”:
01 #include <stdio.h>
02 #include <stdlib.h>
03
04 int add(int a, int b)
05 {
06 return a+b;
07 }
08
09 int main(int argc, char **argv)
10 {
11 int a;
12 int b;
13
14 if (argc != 3)
15 {
16 printf("Usage: %s <val1> <val2>\n", argv[0]);
17 return -1;
18 }
19
20 a = (int)strtol(argv[1], NULL, 0);
21 b = (int)strtol(argv[2], NULL, 0);
22
23 printf("%d + %d = %d\n", a, b, add(a, b));
24 return 0;
25 }
上面的 add函数代码最简单,但是对应的汇编也挺复杂:需要入栈、出栈等操作,效率不算高。看看test.dis:
266 00010404 <add>:
267 10404: b480 push {r7}
268 10406: b083 sub sp, #12
269 10408: af00 add r7, sp, #0
270 1040a: 6078 str r0, [r7, #4]
271 1040c: 6039 str r1, [r7, #0]
272 1040e: 687a ldr r2, [r7, #4]
273 10410: 683b ldr r3, [r7, #0]
274 10412: 4413 add r3, r2 // 真正实现加法的只有这条指令 275 10414: 4618 mov r0, r3
276 10416: 370c adds r7, #12
277 10418: 46bd mov sp, r7
278 1041a: f85d 7b04 ldr.w r7, [sp], #4
279 1041e: 4770 bx lr
280
1.1.2 使用汇编函数实现加法
使用 GIT下载后,源码在“07_驱动大全\source\01_inline_assembly\02_assembly\add.S”:
01 .text // 放在代码段
02 .global add // 实现全局函数 add
03 .thumb // 使用 thumb指令, main.c默认使用 thumb指令, 所以这里也使用 thumb指令
04
05 add:
06 add r0, r0, r1
07 bx lr
08
根据 ATPCS规则,main函数调用 add(a, b)时,会把第一个参数存入 r0寄存器,把第二个参数存入 r1寄存器。
在上面第 06行里,把 r0、r1累加后,结果存入 r0:根据 ATPCS规则,r0用来保存返回值。
可以看到,这个 add函数连栈都没有使用,非常高效。
这只是一个很简单的例子,我们工作中并不使用汇编来进行“加法优化”,在计算量非常大的地方可以考虑单独编写汇编函数实现优化。
1.1.3 内联汇编语法
从上面例子可以看到,我们完全可以新建一个汇编文件,在 ATPCS规则之下编写代码,这样 C函数就可以直接调用汇编函数。
但是,需要新建汇编文件,有点麻烦。
使用内联汇编,可以在 C代码中内嵌汇编代码。
先看看内联汇编的语法。
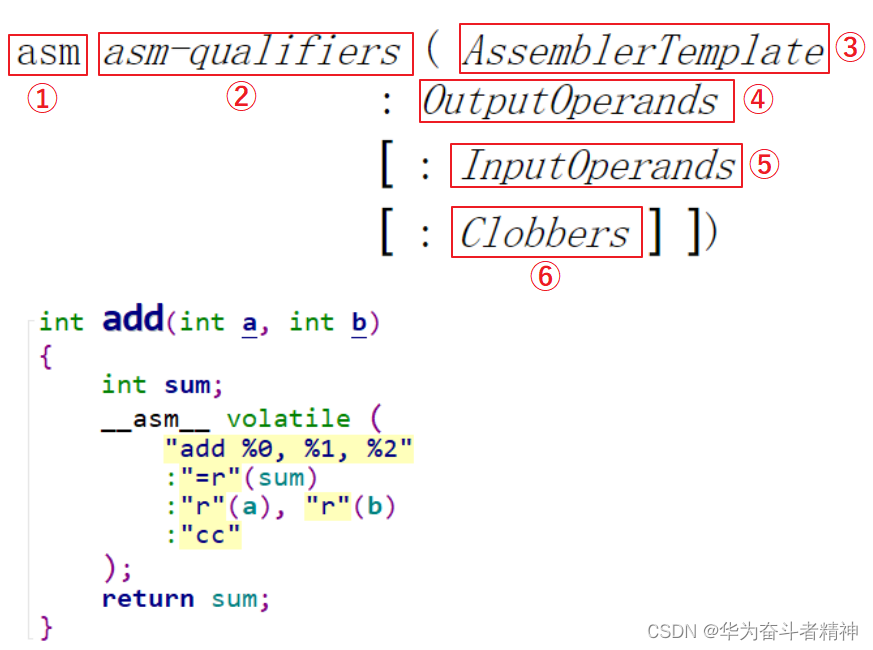
内联汇编语法:
① asm
也可以写作“asm”,表示这是一段内联汇编。
② asm-qualifiers
有 3个取值:volatile、inline、goto。
volatile的意思是易变的、不稳定的,用来告诉编译器不要随便优化这段代码,否则可能出问题。比如汇编指令“mov r0, r0”,它把 r0的值复制到 r0,并没有实际做什么事情,你的本意可能是用这条指令来延时。编译器看到这指令后,可能就把它去掉了。加上 volatile的话,编译器就不会擅自优化。
其他 2个取值我们不关心,也比较难以理解,不讲。
③ AssemblerTemplate
汇编指令,用双引号包含起来,每条指令用“\n”分开,比如:
“mov %0, %1\n”
“add %0, %1, %2\n”
④ OutputOperands
输出操作数,内联汇编执行时,输出的结果保存在哪里。
格式如下,当有多个变量时,用逗号隔开:
[ [asmSymbolicName] ] constraint (cvariablename)
asmSymbolicName是符号名,随便取,也可以不写。 constraint表示约束,有如下常用取值:

constraint前还可以加上一些修饰字符,比如“=r”、“+r”、“=&r”,含义如下:

variablename:C语言的变量名。
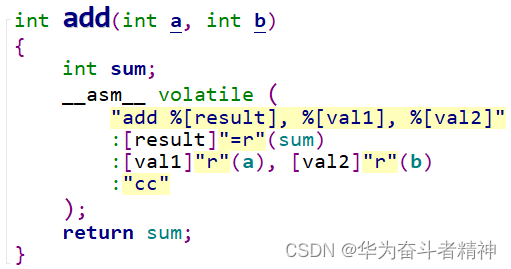
示例 1如下:
[result] “=r” (sum)
它的意思是汇编代码中会通过某个寄存器把结果写入 sum变量。在汇编代码中可以使用“%[result]”来引用它。
示例 2如下:
“=r” (sum)
在汇编代码中可以使用“%0”、“%1”等来引用它,这些数值怎么确定后面再说。
⑤ InputOperands
输入操作数,内联汇编执行前,输入的数据保存在哪里。
格式如下,当有多个变量时,用逗号隔开:
[ [asmSymbolicName] ] constraint (cexpression)
asmSymbolicName是符号名,随便取,也可以不写。
constraint表示约束,参考上一小节,跟 OutputOperands类似。
cexpression:C语言的表达式。
示例 1如下:
[a_val]“r”(a), [b_val]“r”(b)
它的意思变量 a、b的值会放入某些寄存器。在汇编代码中可以使用%[a_val]、%[b_val]使用它们。
示例 2如下:
“r”(a), “r”(b) 它的意思变量 a、b的值会放入某些寄存器。在汇编代码中可以使用%0、%1等使用它们,这些数值后面再说。
⑥ Clobbers 在汇编代码中,对于“OutputOperands”所涉及的寄存器、内存,肯定是做了修改。但是汇编代码中,也许要修改的寄存器、内存会更多。比如在计算过程中可能要用到 r3保存临时结果,我们必须在“Clobbers”中声明 r3会被修改。 下面是一个例子: : “r0”, “r1”, “r2”, “r3”, “r4”, “r5”, “memory”
我们常用的是有“cc”、“memory”,意义如下:

1.1.4 编写内联汇编实现加法
使用 GIT下载后,源码在“07_驱动大全\source\01_inline_assembly\03_inline_assembly\main.c”:
04 int add(int a, int b)
05 {
06 int sum;
07 __asm__ volatile (
08 "add %0, %1, %2"
09 :"=r"(sum)
10 :"r"(a), "r"(b)
11 :"cc"
12 );
13 return sum;
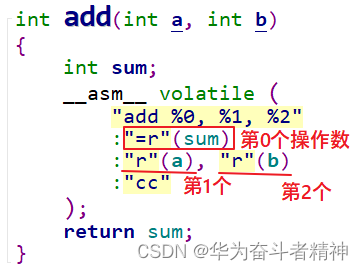
所以第 08行代码就是:把第 1、2个操作数相加,存入第 0个操作数。也就是把 a、b相加,存入 sum。
还可以使用另一种写法,在 Linux内核中这种用法比较少见。
使用 GIT下载后,源码在“07_驱动大全\source\01_inline_assembly\03_inline_assembly\main2.c”:
1.1.5 earlyclobber的例子
OutputOperands的约束中经常可以看到“=&r”,其中的“&”表示 earlyclobber,它是最难理解的。有
一些输出操作数在汇编代码中早早就被写入了新值 A,在这之后,汇编代码才去读取某个输入操作数,这个输出操作数就被称为 earlyclobber(早早就被改了)。
这可能会有问题:假设早早写入的新值 A,写到了 r0寄存器;后面读输入操作数时得到数值 B,也可能写入 r0寄存器,这新值 A就被破坏了。
核心原因就在于输出操作数、输入操作数都用了同一个 r0寄存器。为什么要用同一个?因为编译器不知道你是 earlyclobber的,它以为是先读入了所有输入操作数,都处理完了,才去写输出操作数的。按这流程,没人来覆盖新值 A。
所以,如果汇编代码中某个输出操作数是 earlyclobber的,它的 constraint就要加上“&”,这就是告诉编译器:给我分配一个单独的寄存器,别为了省事跟输入操作数用同一个寄存器。
使用 GIT下载后,源码在“07_驱动大全\source\01_inline_assembly\04_earlyclobber\main.c”:
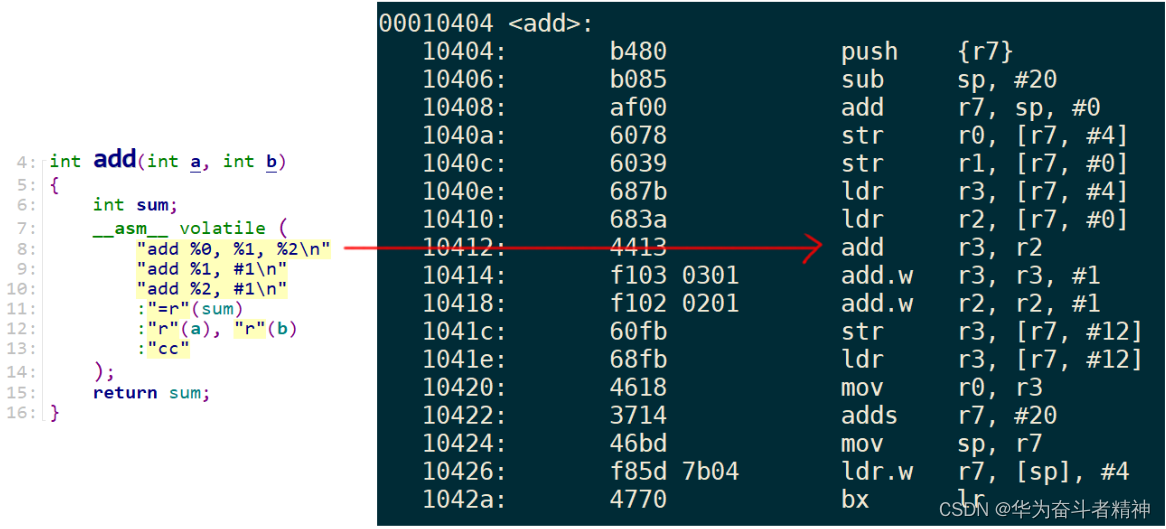
上面的代码中,输出操作数%0对应的寄存器是 r3,输入操作数%1对应的寄存器也是 r3。
第 8行更新了%0的值后,第 9行修改%1的值,由于%0、%1是同一个寄存器,所以%0的值也被修改了。 最终返回的累加值是错的,增加了 1,如下图所示:

怎么修改?在第 11行加“&”就可以了,这是告诉编译器,对于%0操作数它是 earlyclobber的,不能跟其他操作数共用寄存器,如下:
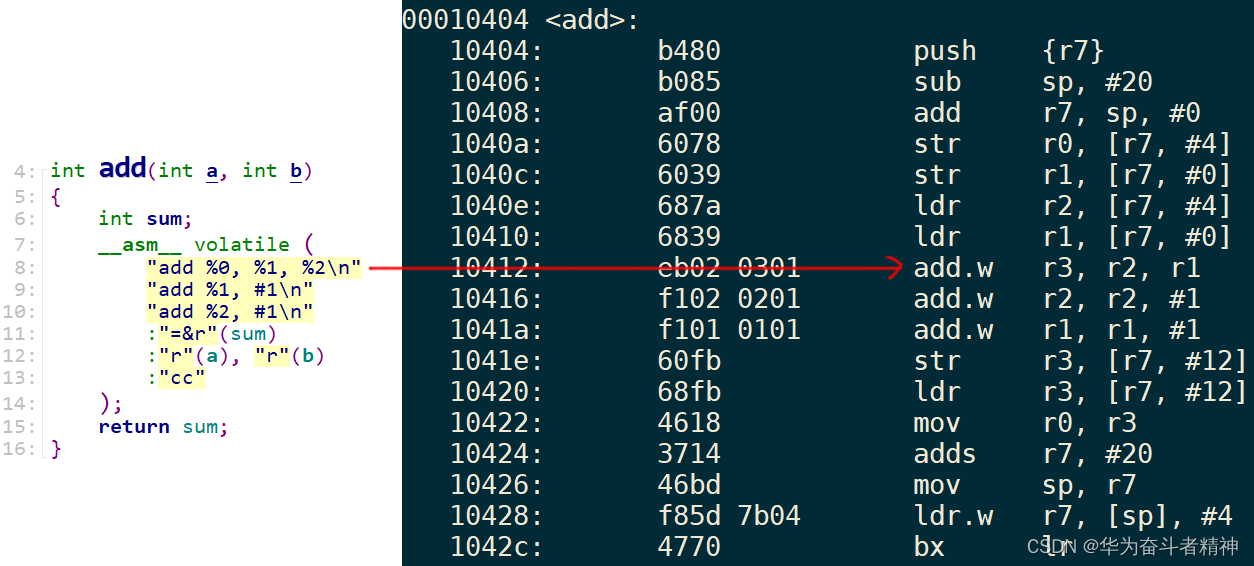
从右边的反汇编码可以知道,%0跟%1、%2使用不一样的寄存器,所以后面第 9、10行无法影响到%0的值。
程序运行结果如下图所示:

1.2 同步与互斥的失败例子
注意:本节在 GIT上没有源码。
一句话理解同步与互斥:我等你用完厕所,我再用厕所。
什么叫同步?就是条件不允许,我要等等。
什么是互斥?你我早起都要用厕所,谁先抢到谁先用,中途不被打扰。
同步与互斥经常放在一起讲,是因为它们之的关系很大,“互斥”操作可以使用“同步”来实现。我“等”你用完厕所,我再用厕所。这不就是用“同步”来实现“互斥”吗?
有时候看代码更容易理解,伪代码如下:
01 void 抢厕所(void)
02 {
03 if (有人在用) 我眯一会;
04 用厕所;
05 喂,醒醒,有人要用厕所吗;
06 }
假设有 A、B两人早起抢厕所,A先行一步占用了;B慢了一步,于是就眯一会;当 A用完后叫醒 B,B也就愉快地上厕所了。
在这个过程中,A、B是互斥地访问“厕所”,“厕所”被称之为临界资源。我们使用了“休眠-唤醒”的同步机制实现了“临界资源”的“互斥访问”。
上面是一个有“味道”的例子,回到程序员的世界,一个驱动程序同时只能有一个 APP使用,怎么实现?
1.2.1 失败例子1
01 static int valid = 1;
02
03 static ssize_t gpio_key_drv_open (struct inode *node, struct file *file) 04 {
05 if (!valid)
06 {
07 return -EBUSY;
08 }
09 else
10 {
11 valid = 0;
12 }
13
14 return 0; //成功
15 }
16
17 static int gpio_key_drv_close (struct inode *node, struct file *file)
18 {
19 valid = 1;
20 return 0; 21 }
22
看第 5行,我们使用一个全局变量 valid来实现互斥访问。这有问题吗?很大概率没问题,但是并非万无一失。
注意:编写驱动程序时,要有系统的概念,程序 A调用驱动程序时,它可能被程序 B打断,程序 B也去调用这个驱动程序。
下图是一个例子,程序 A在调用驱动程序的中途被程序 B抢占了 CPU资源:
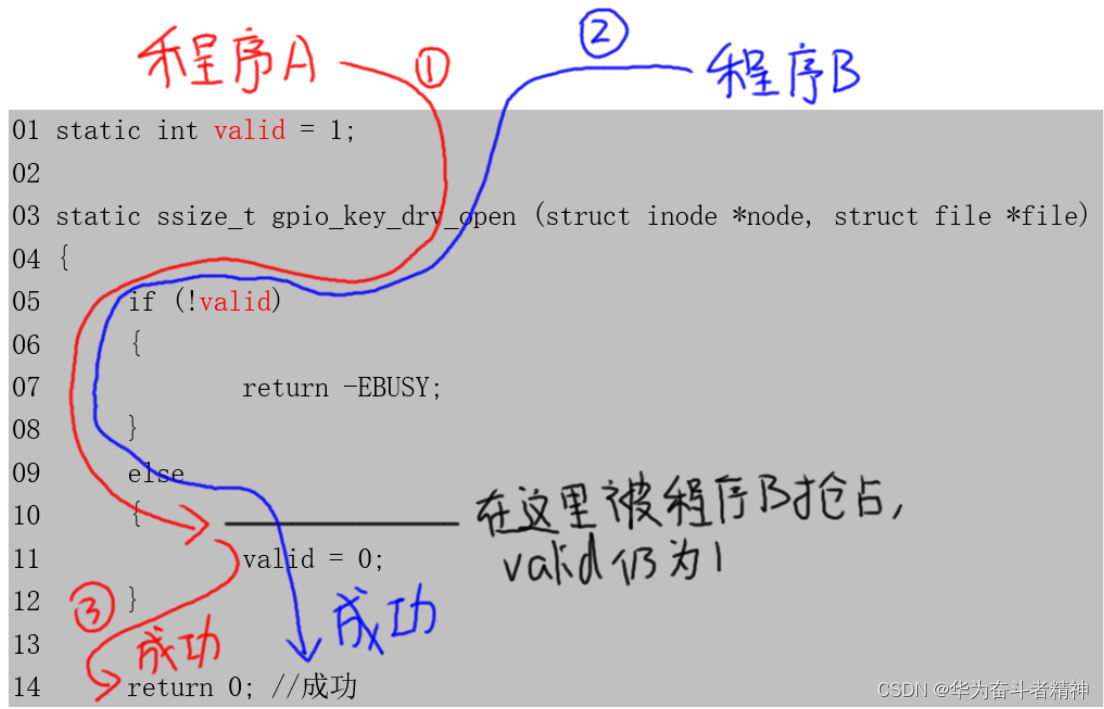
程序 A执行到第 11行之前,被程序 B抢占了,这时 valid尚未被改成 0;
程序 B调用 gpio_key_drv_open时,发现 valid等于 1,所以成功返回 0;
当程序 A继续从第 11行执行时,它最终也成功返回 0;
这样程序 A、B都成功打开了驱动程序。
注意:在内核态,程序 A不是主动去休眠、主动放弃 CPU资源;而是被优先级更高的程序 B抢占了,这种行为被称为“preempt”(抢占)。
1.2.2 失败例子2
上面的例子是不是第 5行到第 11行的时间跨度大长了?再优化一下程序行不行?代码如下:
01 static int valid = 1;
02
03 static ssize_t gpio_key_drv_open (struct inode *node, struct file *file)
04 {
05 if (--valid)
06 {
07 valid++;
08 return -EBUSY;
09 }
10 return 0;
11 }
12
13 static int gpio_key_drv_close (struct inode *node, struct file *file)
14 {
15 valid = 1;
16 return 0;
17 }
18
第 5行先减 1再判断,这样可以更大概率地避免问题,但是还是不能确保万无一失。对数据的修改分为 3步:读出来、修改、写进去。请看下图:
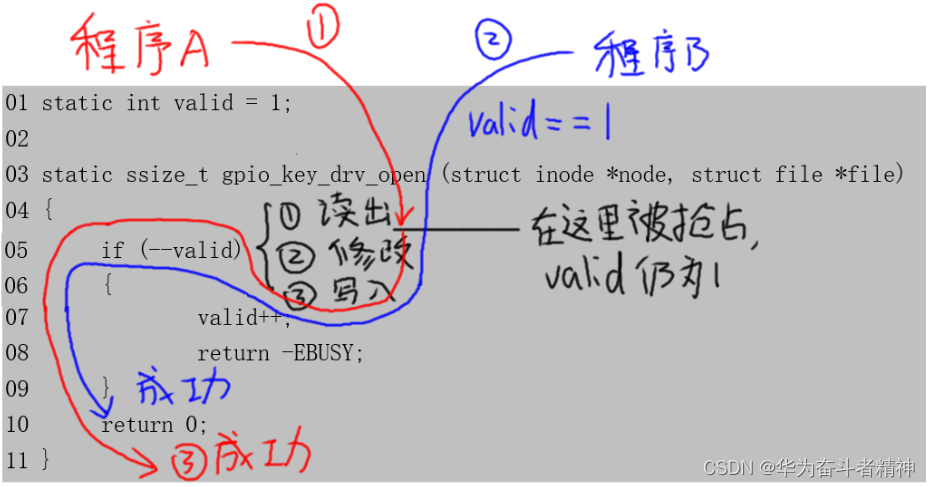
进程 A在读出 valid时发现它是 1,减 1后为 0,这时 if不成立;但是修改后的值尚未写回内存; 假设这时被程序 B抢占,程序 B读出 valid仍为 1,减 1后为 0,这时 if不成立,最后成功返回; 轮到 A继续执行,它把 0值写到 valid变量,最后也成功返回。
这样程序 A、B都成功打开了驱动程序。
1.2.3 失败例子3
前面 2个例子,都是在修改 valid的过程中被别的进程抢占了,那么在修改 valid的时候直接关中断不就可以了吗?
01 static int valid = 1;
02
03 static ssize_t gpio_key_drv_open (struct inode *node, struct file *file)
04 {
05 unsigned long flags;
06 raw_local_irq_save(flags); // 关中断
07 if (--valid)
08 {
09 valid++;
10 raw_local_irq_restore(flags); // 恢复之前的状态
11 return -EBUSY;
12 }
13 raw_local_irq_restore(flags); // 恢复之前的状态
14 return 0;
15 }
16
17 static int gpio_key_drv_close (struct inode *node, struct file *file)
18 {
19 valid = 1;
20 return 0;
21 }
第 06行直接关中断,这样别的线程、中断都不能来打扰本线程了,在它读取、修改 valid变量的过程中无人打扰。
没有问题了?
对于单 CPU核的系统上述代码是没问题的;但是对于 SMP系统,你只能关闭当前 CPU核的中断,别的CPU核还可以运行程序,它们也可以来执行这个函数,同样导致问题,如下图:
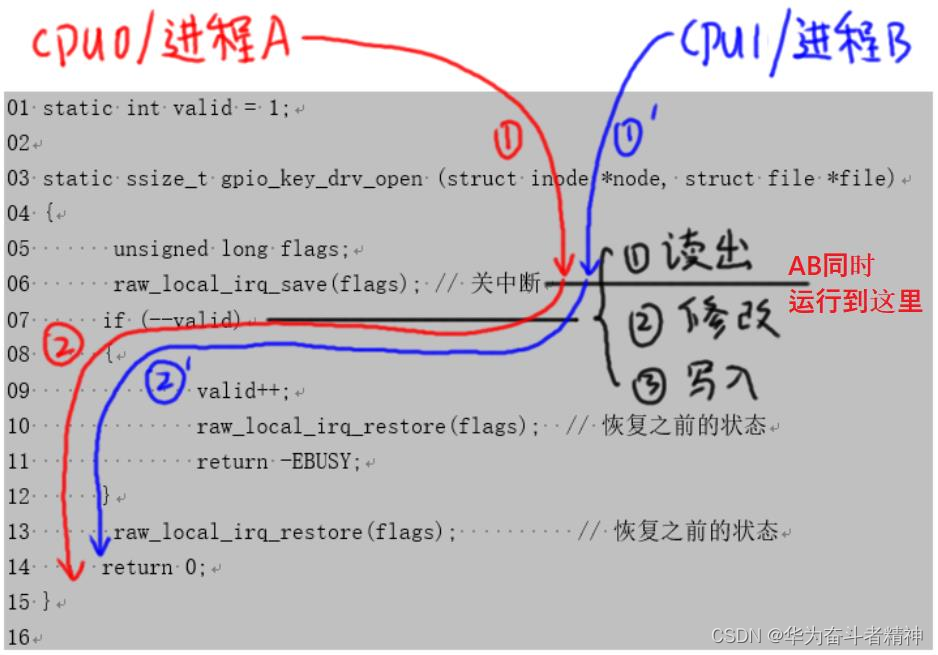
假设 CPU0上进程 A、CPU1上进程 B同时运行到上图中读出 valid的地方,它们同时发现 valid都是 1,减减后都等于 0,在第 07行判断条件都不成立,所以在第 14行都可以返回 0,都可以成功打开驱动。