前言
哈希其实是一种搜索方式,像暴力查找,有序数组的二分查找,二分查找就很快了,可以达到O(log n)。但是有序数组有一个 弊端,就是要先进行排序,这就有消耗,这还好,当要插入删除修改数据的时候,那么这种效率就不可看了。
然后就有了平衡搜索树的出现:
比如 AVL树 , B树 , B+树 , 红黑树等等,可以看下面几篇博客的讲解:
C++ - set 和 map 的实现(下篇)- set 和 map 的迭代器实现_chihiro1122的博客-CSDN博客
C++ - map 和 set 的模拟实现上篇 - 红黑树当中的仿函数 - 红黑树的迭代器实现-CSDN博客
C++ - 红黑树 介绍 和 实现-CSDN博客
C++ - AVL树实现(下篇)- 调试小技巧_chihiro1122的博客-CSDN博客
C++ - AVL 树 介绍 和 实现 (上篇)-CSDN博客
平衡搜索树好就好在,它的增删查改都是 O(log N) ,它插入删除虽然在实现上很复杂,但是真正运行起来,效率非常高,因为 其中的 旋转等等的操作都没有用到多少循环,都是 O(1)级别的。
但是平衡搜索树也是有缺点的,比如当数据量重复或者 相对有序或有序的情况下,虽然查找还是O(log n) 级别的,但是插入和删除在效率上就会明显下降,但是最多也就下降到 二分查找的级别。因为比如是有序数据的话,它会蜕变成类似链表的形式。
所以,就有了哈希 更 平衡二叉树补全。两者之间可谓是 各有各的优缺点,具体可以看这篇博客:
C++ - unordered系列关联式容器介绍 - 和 set map 的比较-CSDN博客
其中的 set 和 map 底层是红黑树实现,而 unordered_map 和 unordered_set 底层是哈希。
认识哈希
顺序结构以及平衡树中,元素关键码与其存储位置之间没有对应的关系,因此在查找一个元素
时,必须要经过关键码的多次比较。顺序查找时间复杂度为O(N),平衡树中为树的高度,即
O(log_2 N),搜索的效率取决于搜索过程中元素的比较次数。
理想的搜索方法:可以不经过任何比较,一次直接从表中得到要搜索的元素。如果构造一种存储结构,通过某种函数(hashFunc)使元素的存储位置与它的关键码之间能够建立一一映射的关系,那么在查找时通过该函数可以很快找到该元素。
哈希(散列表):存储的值跟存储的位置建立出一个映射关系(对应关系)。这个映射关系是使用 函数来表示和实现的。把 存储的值跟存储的位置建立出一种规则,在查找的时候,可以按照这个规则,快速的跳过不需要遍历的数据,跳跃式的查找到我们想要查找到的数据。也就是在查找当中,有了规则,有了查找的方向,不再像暴力查找当中一样,一头查到底,无向的查找。
比如计数排序当中就有哈希的影子:数据结构-基数排序_chihiro1122的博客-CSDN博客
哈希寻找数据的过程,就跟在学校图书馆找书差不多,图书馆一般是分区的,比如 有 计算机类的,有金融类的等等,而在这些区当中又是按照 拼音,比如 开头是A 的放在一堆,B 开头的放在 一堆的···········:
我们发现,不管是 计数排序还是 上述图书馆排列书籍,排列出来的区间都太分散了,不太好寻找。像上述的属于 直接定值法,比如上述图书馆就是按照字母的大小排序,直接和存储地址进行匹配,适合于数据比较集中的,但是遇到数据比较分散的就不适合了。
当,数据比较分散,不好用直接定值法,所以就有人提出了除留余数法。他就是创建一个规则,然后数据按照这个规则计算出应该存储的应该存储的位置,在除留余数法的数组当中,同样有多个区,每一个区当中都有一个数的映射位置,每次存储数据可以按照这个映射关系来在这个表当中进行存储,这样每个数据存储的位置就有了规则,在查找的时候,计算出需要查找的数在这个区当中的映射位置,如果没有,就查找往下遍历元素,具体可以参考 下述 线性探测。
在数据结构当中学习的哈希表,一般是使用下述这种规则进行存储的:
hash = key % size;其中的 key 是要存储的数据,size 的值一般是刚开始给数据个数,或者是小一些的数,这样就可以以 size 大小把 整个数组分成一个一个区间,而每一个 key 值 模上 size 之后肯定是 0 - size 的数,那么就可以在某一个区间当中有一席之地了。
但是这一种方法有一个很大弊端,它只能支持 类似整形这样 数据,如果是string类型的数据,或者是一些自定义类型,那么上述的规则就不适用了,但是总会有解决办法的,具体在哈希实现当中具体介绍。
建立一个哈希表不一定一定要是用 除留余数法,还有很多方法可以建立,如下所示:
平方取中法
假设关键字为1234,对它平方就是1522756,抽取中间的3位227作为哈希地址;再比如关键字为4321,对它平方就是18671041,抽取中间的3位671(或710)作为哈希地址平方取中法比较适合:不知道关键字的分布,而位数又不是很大的情况。
折叠法
折叠法是将关键字从左到右分割成位数相等的几部分(最后一部分位数可以短些),然后将这几部分叠加求和,并按散列表表长,取后几位作为散列地址。折叠法适合事先不需要知道关键字的分布,适合关键字位数比较多的情况。
随机数法
选择一个随机函数,取关键字的随机函数值为它的哈希地址,即H(key) = random(key),其中
random为随机数函数。通常应用于关键字长度不等时采用此法。
数学分析法
设有n个d位数,每一位可能有r种不同的符号,这r种不同的符号在各位上出现的频率不一定相同,可能在某些位上分布比较均匀,每种符号出现的机会均等,在某些位上分布不均匀只有某几种符号经常出现。可根据散列表的大小,选择其中各种符号分布均匀的若干位作为散列地址。
本博客主要介绍 除留余数法。
哈希冲突
相信你已经猜到会有冲突的情况了,就是前面插入的数据肯定会占用某一个区间的某一个映射位置,那么在后序插入的数据肯定会有情况,在规则计算之后,和之前插入数据的位置冲突,图喜爱图所示:
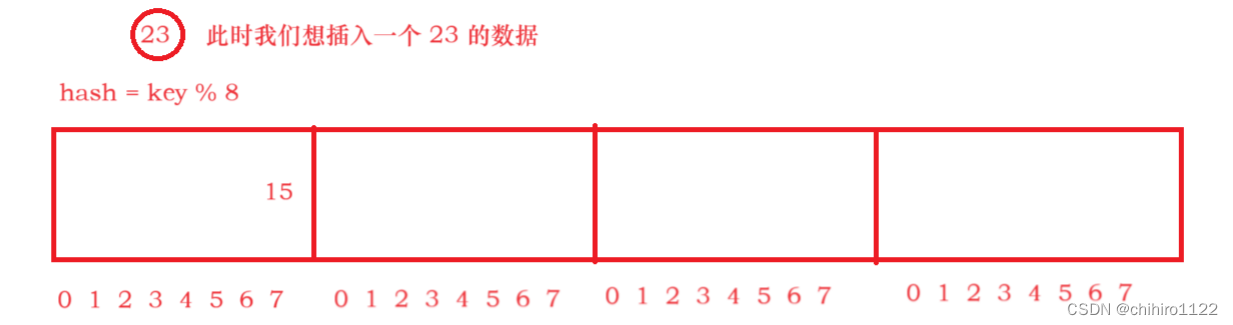
我们发现,当我们想要插入 23 这个数据的时候,23 % 8 = 7,那么我们应该插入到 第一区间当中的 7 这个位置,但是 这个位置已经被 15 占了。这种情况就是哈希冲突。
闭散列
线性探测
解决哈希冲突的有三种解决方案,这里先不列出,先举个闭散列当中的线性探测进行理解,因为三种解决方案虽然不一样,但是大思路都是往后寻找可以插入的位置:
如果我们当前想插入数据 ,和数组当中的某个数据的存储位置冲突了,按规则,找下一个位置(占用几个别人的位置)。
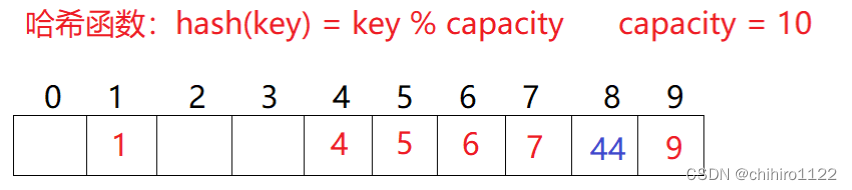
如上述所示,我们当前要插入元素 44 ,原本插入的位置应该是 下标为 4 的位置,但是这个位置就已经被 4 给占用了,发生了哈希冲突。此时就要在这个区间当中往后寻找空位置,如上,就找到了 8 这个位置是空的,那么就在这个位置进行插入。
如上述所示,如果当前到插入的位置已经被人占了,往后寻找位置的时候已经超出了 capacity 数组大小了,首先要做的不是开空间,而是从这个区间的首元素地址开始再次寻找前面是否有空位置,如果有,就插入,没有才会进行扩容操作。
如果,没有像上述一样先往前寻找,没有空位再扩容,就是如果冲突就扩容的话,就会造成下述的情况的空间浪费:

如上所示,数组此时就之后一个19 元素,如果我们插入一个 9 的话,就会发生哈希冲突,那么正常应该是先从头开始寻找,然后插入到第一个位置,如果直接扩容的话,前面这个数组空间此时就极大的浪费了。
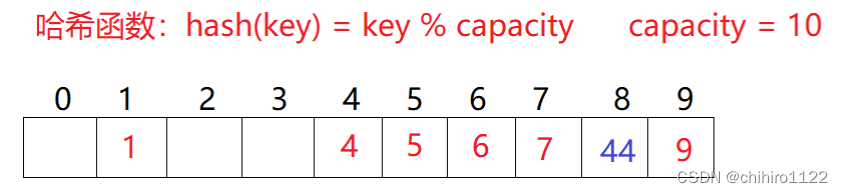
此时 查找 44 是这样查找的:
首先计算 44 的应该存储位置,也就是 下标为 4 的这个位置,如果这个位置不是 44 的话,那么就要往后线性探测,找到了就停止。
如果此时要寻找的是 54 ,54 是数组当中没有的,那么首先一样找到 下标为 4 的位置,然后往后寻找,找到9 的时候这个区间就到头了,就要往前寻找,当找到 位置0的时候,因为 位置 0 是空,此时就停止了;或者再次走到 下标为4 的这个位置,都代表着这个区间当中没有这个元素。
按照上述这种查找规则,意味着,如果表当中的很满的话,查找效率会下降,所以这也就引出了一个问题,哈希表不会纵容这种事情的发生,肯定不会让一个区间当中的数据太满的。那么就会涉及到 什么时候扩容的问题了。这个问题后面再介绍。
哈希表的删除数据也是有讲究的,比如要上述数组的 6 这个元素,不能直接删除掉6 这个元素,小的影响是 ,如果把 上述的 1 4 5 6 7 9 都删除了,值剩下一个 44 ,那么其中的空间不就浪费了。
更大影响是,如果直接删除了 6 这个元素,那么 下标为 6 的这个位置就是空了,那么在删除之后,去查找 44 这个元素的时候,从4 位置开始遍历,按照上述的查找规则,遇到空就停止了,但是此时没有查找到 44 这个元素,但是这个元素到 数组当中是真实存在的,那么就出大问题了。
也不能直接填上一个无效值,应为我们当前要实现的哈希表要是一个模版,泛型编程要能存储多种数据,所以无效值是什么都不太好。
我们选择标记的方式解决上述问题:
数组当中的一个元素不止存储值,还有存储该元素当前的一个状态,有三种状态:
- EXITS:存在
- EMPTY:空
- DELETE:删除
所以现在删除这个 6 ,就不要真删除这个 6 了,直接把这个元素的状态修改为 DELETE就行了。
按照上述进行修改之后,我们在寻找 44 的时候,是遇到 EMPTY 才会停止,遇到 DELETE 就不会停止了。
哈希表的闭散列线性探测方式实现
insert()插入函数
按照上述对 线性探测的说明和一些细节的探讨,我们先来实现一下 哈希表的 闭散列当中的 线性探测:
因为哈希表的物理存储是一个数组,所以直接使用 vector 来存储数据。还考虑到 一个元素有三种状态,所以,我们创建一个枚举类型来列举出着三种类型,方便后续修改这三种状态。
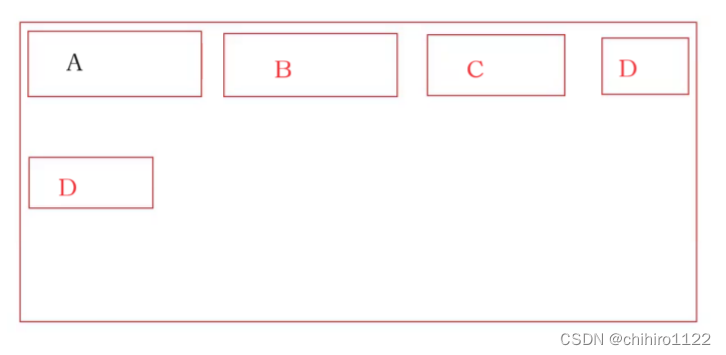
在 vector 当中就有 _size这个成员变量来维护vector 当中的有效数据个数,但是这时不够的,我们还需要在哈希当中创建一个成员变量 _n 用于存储 哈希当中的有效数据个数。以为 哈希当中的数据不是挨着存储的,他是哈希又叫散列表,其中的元素是散着存储的,而在 vector 当中的 _size 存储的是vector 当中的有效数据个数,这两者之间是不一样的,我们用一张图来解释:

当表中的数据没有满的时候, vector 当中的 _size 存储的是 0 - 9 整个数组的长度,而 哈希当中的 _n 存储是在这个表当中没有不为空的数据个数。
我们需要一个 _n 用于维护不为空的数据个数,当这个表满了或者快满的时候,我们需要进行扩容。关于扩容,我们先实现哈希的基本算法之后再来说明。
某一个数据如果要插入到表当中,需要一个起始位置,我们先来计算这个起始位置:
首先我们要考虑的是,我们取模使用的 数,应该是 vector 当中的 _capacity 还是 _size。
如果我们使用 _capacity 的话,那么下述就不能使用 vector当中的 operator[]()这个函数来对其中的成员当中的属性进行修改了,因为,operator[]() 这个函数,只能访问 下标小于 size() 的元素,不能访问超出 size()的元素,比如:
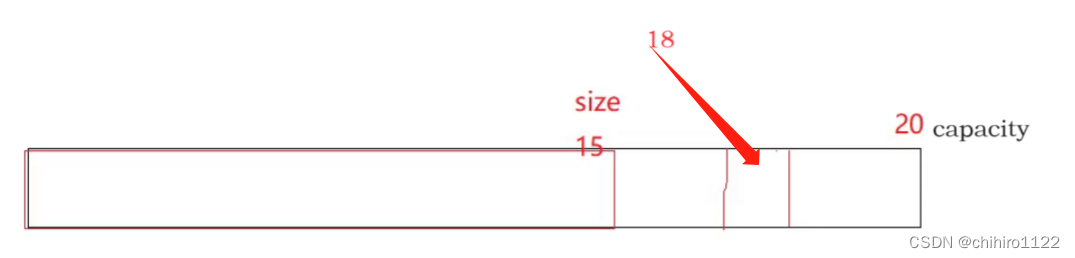
现在我们想插入一个 18 ,那么如果是按照 capacity 20 来取模的话,就是 size - capacity 中间的这个位置,那么此时的这个位置就会超出 operator[]()这个函数访问的元素范围,在这个函数当中就会直接断言报错。空间确实是开出了 capacity 的大小,但是 在 operator[]() 当中就会限制在 size()当中去访问。
所以,我们为了后续能够使用 operator[]()更方便的修改 vector 也就是哈希表当中的元素,我们还是控制 在 size()之内。
而且,我们还考虑到 ,让 size 和 capacity 相等,这样的话就会大大的减少空间的浪费。控制相等我们可以使用 vector 当中的 resize()函数来进行扩容,这样就可以保持size 和 capacity 相等。
现在解决了初始位置的问题,但是如果初始位置上有元素,那么我们还需要往后继续遍历,当访问到 某一个元素的 状态是 EMPTY 或者是 DELETE的就可以插入了。因为 DELETE 的元素,在顺序表当中是要被直接删除掉然后往前挪数据的,但是在哈希表当中,我们引入了状态这个值,那么可以对元素进行个性化的赋值,直到这个元素当中处于哪一种状态,所以,当我们给这个元素的状态修改为 DELETE 就直接代表这个元素已经不要了。
当我们实现好基础插入逻辑之后,就要来看看 扩容问题了。
在介绍线性探测的时候说过,哈希表不敢让自己太满,或者满,因为哈希表满的话,插入的效率会下降得很快。因为,表快满了,其中的值已经很多了,随便插入几个数就会冲突。冲突就会往后进行遍历,又因为表快满了,遍历的次数就会很多,当表满的时候,相当于全部遍历一遍。找一个 不存在的值不进行特殊判断还会死循环。
哈希表的扩容问题
哈希表当中用一个 值来存储 其中元素个数和 开空间个数的关系:

看这个 α ,就可以知道当前 表当中的有效元素个数和 表的长度的关系。显然,这个 α 越大,产生哈希冲突的概率就越大,但是空间利用率越高,反之。
这个 载荷因子 是哈希表当中一个非常重要的一个 数,因为这个数的大小会直接影响到整个哈希表的插入效率。
一般:
对于开放定址法,应该严格控制载荷因子在 0.7 - 0.8 一下,超过 0.8 ,在查表的时候CPU花村不命中按照指数曲线飞速上升。所以,一些采用开放定址法的hash库,如JAVA的系统库限制了载荷因子0.75,超过0.75 就会 resize 散列表。
我们本博客实现的哈希表使用上述方法进行扩容。
重新映射
而且,不能直接还用 resize()函数来直接进行扩容:

如果像上述一样直接库容的话,就会出问题,如下所示:

如果在扩容之后,我们想找到 111 这个元素,那么应该是 111 % 20 找到 初始位置,是 11,那么就会在 11 这个位置去找的,但是我们发现,这个初始位置其实是错误的。
所以扩容之后就要重新映射。
此处实现就重新创建一个 vector ,然后把 原 vector 当中的数据都按照新的 hash 函数插入到新的vector 当中。
当然,要直接创建一个 vector也行,但是我们使用现代写法,让编译器帮我们把原vector 释放掉,如下所示,创建一个 hash对象 - newhash,把 newhash对象当中的 vector 空间开成扩容之后的大小,把 原vector 当中的数据按照新的hash 规则插入到 新的vector 当中之后,直接将两个 hash 当中的两个 vector 进行交换,这样原vector就复制给新的hash 当中去了,这个 newhash 出了 insert()函数作用域就会自动销毁:
我们发现,哈希表的插入会有不小的消耗,但是扩容不是每一次都发生的,如果把哈希表执行之间化成一个曲线的话,大概是这样的:
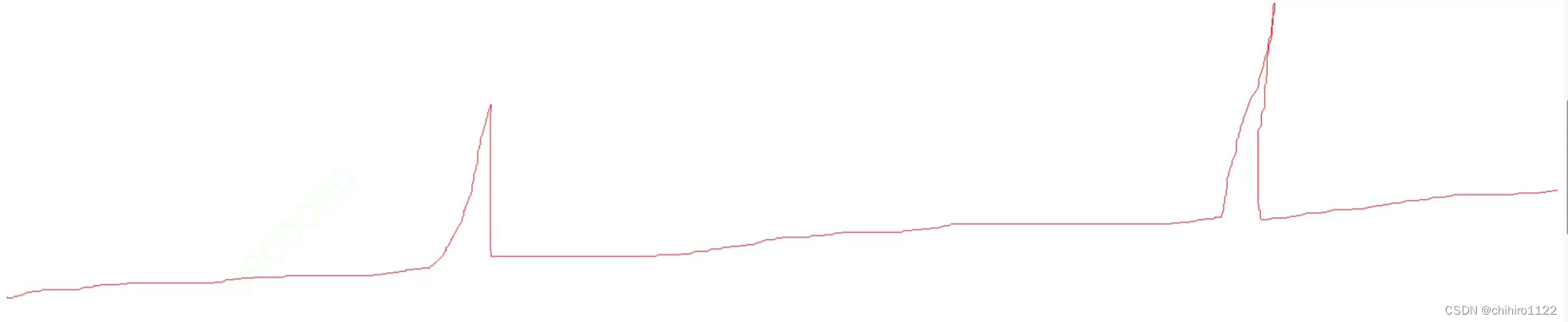
他会有一个峰值,这个峰值就是扩容,但是不是扩容的话,哈希表效率是非常高的。而且,哈希表的扩容不频繁。
insert完整代码:
hash()
{
// 使用 resize 函数可以让 size 和 capacity 保持一致
_table.resize(10);
}
bool insert(const pair<K, V>& kv)
{
// 扩容
// 要考虑一个问题,当 初始的时候 _table当中的没有元素
// 可以直接判断_table.size() == 0
// 但是有更好的方式,就是写个构造函数,初始就开一点点空间
// 至少得强转一个为 double(另一个就会隐式的转),不然 int类型 7 / 10 = 0
if (_n * 10 / _table.size() >= 7)
{
size_t newsize = _table.size() * 2;
hash<K, V> newhash;
newhash._table.resize(newsize);
for (size_t i = 0; i < _table.size(); i++)
{
if (_table[i].state == EXITS)
{
// 不会死循环,以为空间已经开好了,在这次结束之间不会满的
newhash.insert(_table[i]._kv);
}
}
// 交换
_table.swap(newhash._table);
}
size_t hashi = kv.first % _table.size();
// 如果遍历的元素不为空就继续遍历
while (_table[hashi].state == EXITS)
{
++hashi;
// 每一次都按照规则模一下,防止遍历到最后超出这个表
hashi %= _table.size();
}
// 此时有两种情况,要么找到了,要么就没找到合适位置,需要扩容
_table[hashi]._kv = kv;
_table[hashi].state = EXITS;
++_n; // 哈希当中的有效个数++
return true;
}
private:
vector<hashNode<K, V>> _table;
int _n; // 存储哈希表当中的有效数据个数
};find()查找函数
关于查找规则上述已经说明了,此处是实现和一些细节的说明。
查找就要遇到空才结束,查找过程和插入过程类型,而且要保证这个结点是存在的,不能是删除的结点。
// 返回值当中的 const 修饰 K 是为了防止 K 被修改
hashNode<const K, V>* find(const K& key)
{
int hashi = key % _table.size();
while (_table[hashi]._kv.state != EMPTY)
{
if (_table[hashi]._kv.state == EXITS
&& _table[hashi]._kv.first == key)
{
return &_table[hashi];
}
++hashi;
hashi &= _table.size();
}
// 没找到
return nullptr;
} 上述返回值当中的 const 修饰 K 是为了防止 K 被修改。其实应该用 迭代器去实现是最好的,具体可以参考 其中红黑树的迭代器实现:
C++ - set 和 map 的实现(下篇)- set 和 map 的迭代器实现_chihiro1122的博客-CSDN博客
C++ - map 和 set 的模拟实现上篇 - 红黑树当中的仿函数 - 红黑树的迭代器实现-CSDN博客
erase()删除函数
一般数据结构删除结点都比 插入结点要难,但是哈希表是一个例外,哈希表的删除非常的简单。按照上述的对删除的描述,只需要复用 find()函数找到这个元素,然后把这个元素的 state状态赋值为 DELETE 删除状态就行。
bool erase(const K& key)
{
hashNode<const K, V>* hashN = find(key);
if (hashN)
{
hashN->state = DELETE;
// 维护 _n
--_n;
return true;
}
return false;
}各种类型作为 key 的哈希表实现
上述实现的 只是 int 类型作为 key 的时候,那么我们直接取模,来计算出初始位置,但是如果是 string 类型的话,显然是不能取模的,此时我们得换一种方式,建立另一种映射关系。
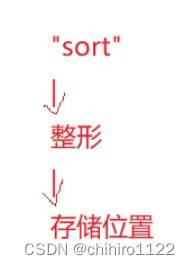
我们之所以不能用string 直接取模,是因为,取模是类似 int类型才能去取模的,那么就想办法把 string类作为整形去计算取模的值,映射出初始位置就行了。
相当于是在整形映射存储位置之上,在建立一个映射,把 字符串建立一个映射:
介绍如何映射之前,我们下来考虑一个问题,在string当中我们找到string当中的某一个字符,最方便的方式是使用 operator[]()函数来访问其中的元素,如下所示:
![]()
但是,我们不能这样写,因为我们当前写的insert()函数当中的传入的 key 这个形参,它的类型是一个模板:

既然是模版,那么传入什么类型的变量都是可能的,那么所有的 内置类型或者 自定义类型都支持 operator[]() 这个函数吗?答案是否定的。
比如int 类型,直接像上述一样 直接使用 key 就行了,那里用什么 operator[]() 取其中的值。
更不可能用每个字符串的首元素地址来寻找哈希当中的字符串:
比如上述两个 string类型,字符串是一模一样的,但是两个字符串的地址是不相同的,我们知道 在string类当中存储字符串也是用一个 字符串数组来存储的,我们肯定不能保证两个字符串的地址相同。
所以按照上述的描述,我们很难使用一个模版函数就实现所有类型的哈希表的操作。
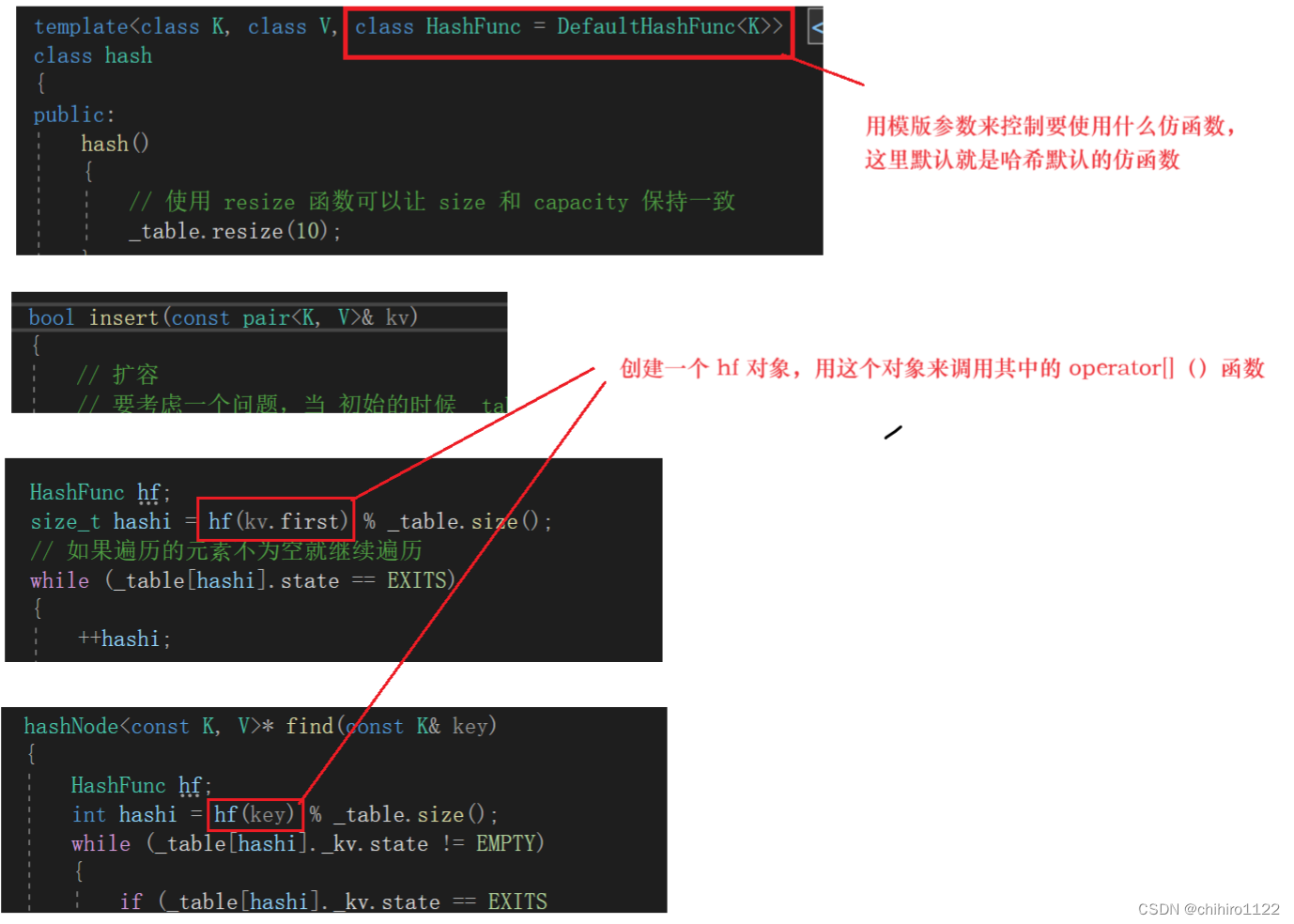
所以,我们得写多个函数来实现多种类型的 哈希表,那么如何控制 函数的使用,我们之前也说过,就是使用仿函数来实现。
仿函数的本质就是,写了一个类,当中写了 operator[]()这个重载运算符函数,我们可以利用这个特性把传进来的参数,可能是一个变量,可能是一个对象,进行特殊的处理,然后实现:一份代码多处使用的泛型编程。
那么此处,我们只用 string 类做例子,只实现 string类在哈希表当中的存储,但是其他方法也是使用类似操作,只是在函数实现上不一样而已。
定义两个仿函数,一个是 哈希表默认的仿函数,也就是我们刚开始实现的 int 类的哈希表;另一个就是 string了:
哈希默认仿函数实现:
template<class K>
struct DefaultHashFunc
{
size_t operator()(const K& key)
{
// 不管是什么类型的,都转换成 size_t
// 不管是 负数还是正数,都转换为 正数
return (size_t)key;
}
};在上述实现之后,我们就可以在 insert(),find()等等函数当中控制 key 的使用了:
string的仿函数:
对于 string转为 int 的类型的方式有两种的:
注意,我们在使用map 和 set 等等容器的时候,发现,并没有仿函数的输入,所以,我们要在此处相比于之前的仿函数使用进行一些处理,应为一些经常要使用的一些类型,我们可以使用特化来直接书写,使用特化来对 string 的 仿函数进行特化;
// string 的特化
template<>
struct DefaultHashFunc<string>
{
size_t operator()(const string& str)
{
// 字符串转 int 的算法
// ·············
}
};如果像上述实现一样实现string的仿函数的话,就可以不用传入模版当中的仿函数参数了:
![]()
第一种 string 转 int 的方法:
首先肯定想到的是,计算 string 每一个字符的 ascll 码值的和,算和大小来排序。但是这样的计算会有问题: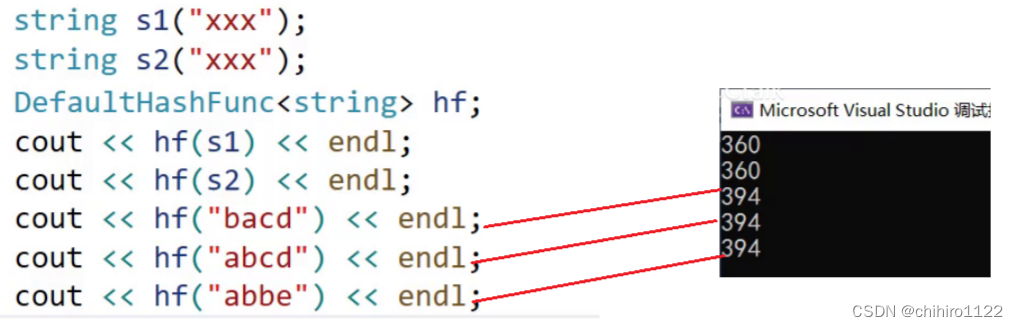
最后三种情况,计算出来应该是不一样的,但是这三种情况应该是不一样的key值。
其实,字符串计算成int 值是一个很常见的算法,在下面这个文章当中就记录了很多 的 字符串转 int 的算法:
各种字符串Hash函数 - clq - 博客园 (cnblogs.com)
有一种简单算法就是在 每一次加 字符的ascll 码之前就 乘上一个数,然后在加:
// string 的特化
template<>
struct DefaultHashFunc<string>
{
size_t operator()(const string& str)
{
// 字符串转 int 的算法
int hash = 0;
for (auto& ch : str)
{
hash *= 131;
hash += ch;
}
return hash;
}
};我们发现,如果不限制字符串的长度的话,那么字符串的组合就是 无限个,转换成 size_t 类型的大小就是 2 ^ 32 种。那么冲突的几率也不大,总是会输出。
完整代码
#pragma once
#include<vector>
namespace Myhash
{
enum STATE
{
EXITS,
EMPTY,
DELETE
};
template<class K, class V>
struct hashNode
{
pair<K, V> _kv;
STATE state = EMPTY;
};
template<class K>
struct DefaultHashFunc
{
size_t operator()(const K& key)
{
// 不管是什么类型的,都转换成 size_t
// 不管是 负数还是正数,都转换为 正数
return (size_t)key;
}
};
// string 的特化
template<>
struct DefaultHashFunc<string>
{
size_t operator()(const string& str)
{
// 字符串转 int 的算法
int hash = 0;
for (auto& ch : str)
{
hash *= 131;
hash += ch;
}
return hash;
}
};
template<class K, class V, class HashFunc = DefaultHashFunc<K>>
class hash
{
public:
hash()
{
// 使用 resize 函数可以让 size 和 capacity 保持一致
_table.resize(10);
}
bool insert(const pair<K, V>& kv)
{
// 扩容
// 要考虑一个问题,当 初始的时候 _table当中的没有元素
// 可以直接判断_table.size() == 0
// 但是有更好的方式,就是写个构造函数,初始就开一点点空间
// 至少得强转一个为 double(另一个就会隐式的转),不然 int类型 7 / 10 = 0
if (_n * 10 / _table.size() >= 7)
{
size_t newsize = _table.size() * 2;
hash<K, V> newhash;
newhash._table.resize(newsize);
for (size_t i = 0; i < _table.size(); i++)
{
if (_table[i].state == EXITS)
{
// 不会死循环,以为空间已经开好了,在这次结束之间不会满的
newhash.insert(_table[i]._kv);
}
}
// 交换
_table.swap(newhash._table);
}
HashFunc hf;
size_t hashi = hf(kv.first) % _table.size();
// 如果遍历的元素不为空就继续遍历
while (_table[hashi].state == EXITS)
{
++hashi;
// 每一次都按照规则模一下,防止遍历到最后超出这个表
hashi %= _table.size();
}
// 此时有两种情况,要么找到了,要么就没找到合适位置,需要扩容
_table[hashi]._kv = kv;
_table[hashi].state = EXITS;
++_n; // 哈希当中的有效个数++
return true;
}
// 返回值当中的 const 修饰 K 是为了防止 K 被修改
hashNode<const K, V>* find(const K& key)
{
HashFunc hf;
int hashi = hf(key) % _table.size();
while (_table[hashi]._kv.state != EMPTY)
{
if (_table[hashi]._kv.state == EXITS
&& _table[hashi]._kv.first == key)
{
// 此时的_table[hashi] 的类型是一个 hashNode<K, V>,那么返回就是一个 隐式类型转换
// 不是所以的编译器都支持 隐式类型转换,所以我们在这里强转一下
return (hashNode<const K, V>*) & _table[hashi];
}
++hashi;
hashi &= _table.size();
}
// 没找到
return nullptr;
}
bool erase(const K& key)
{
hashNode<const K, V>* hashN = find(key);
if (hashN)
{
hashN->state = DELETE;
// 维护 _n
--_n;
return true;
}
return false;
}
private:
vector<hashNode<K, V>> _table;
int _n; // 存储哈希表当中的有效数据个数
};
}