引言
- 向量在计算机图形学、碰撞检测和物理模拟中扮演者关键的角色。因此在游戏开发之前我们必须先了解向量。
- 本章研究向量的使用。
一、向量
- 如果你对数学中的向量不太熟悉,建议阅读《3D数学基础:图形和游戏开发 第2版》,如果你需要某些PDF资源,可以找我😊
(1)向量的简介
- 向量是一种具备大小和方向的量。普通的浮点数如 (3.0) 可以看作是一维向量,屏幕上的坐标如 (200,400) 可以看作是二维向量,三维空间中的点如 (100,200,500) 可以看作是三维向量。
- 向量表示一种方向性,它也有自身的大小,向量还具有平移性。
- 向量具有起点和终点,当然这都是可以平移的。如果一个向量的起点位于坐标系的原点,那么我们就说这个向量位于标准位置。
(2)向量的使用
- 空间具有相对性,因此在度量一切事物之前我们都要建立坐标系,在特点的坐标系下的向量才是有意义的,不同坐标系中同一个向量的代数值不同。
- 要记住在三维空间中讨论任何事情,都要先确定是处于什么坐标系下。当然不同坐标系之间可以进行转换。
- 一个三维向量 (x,y,z) 可以表示点,也可以表示向量,这完全取决于你在编程中怎样认为它。所以在编程中如果我们编写了一个类Vector3,即一个三维向量,那么你可以这样做:
typedef Vector3 Point;
- 很直观对吧,这样在你要使用向量时就用Vector3,在你要使用点时就使用Point。当然在游戏编程中我们通常不这样做,因为我们是可以区分一个变量是点还是向量,这一般取决于这个变量的名字,如果它带有position,则很明显表示位置,否则表示向量。因此在往后对变量的命名时,名称必须能清晰表达其内容。
(3)左手坐标系和右手坐标系
- 向量A叉乘向量B会得到向量C,向量C同时垂直于A和B。我们一般通过左手或右手定则来判断叉乘结果即C的方向。
- Direct3D采用左手坐标系,在左手坐标系中,有A叉乘B等于C。那么现在请你伸出左手,四指指向A的方向(比如你的正前方),然后将四指朝掌心弯曲直到指向B的方向(比如你的正右方),最终你大拇指所指的方向就是C的方向(即你的正上方)。
- 如果你换一只手,你会发现你无法将四指旋转到你的正右方,如果你将右手大拇指朝下,再旋转四指就可以旋转到正右方,此时你的大拇指向下,即C的方向向下。
- 由上可知左右手坐标系叉乘的结果是相反的,即C的方向是不同的。
- 在三维空间中,x轴、y轴、z轴两两相互垂直,许多时候我们会通过叉乘其中两者求得另一者。有时x=y叉乘z,而有时x=z叉乘y。这完全取决于指定的坐标系是左手还是右手。当然没有必要计较那么多,左右只是规定没有好坏之分,我们学习的Direct3D采用左手坐标系,记住这一点就好了。
(4)向量运算理论
- 向量可以进行许多运算,包括:向量与常数的乘除法,向量与向量的加减法,向量与向量的点乘和叉乘。
- 向量和常数的乘除法:向量的每个分量和常数相乘除。
- 向量间加减法:向量的每个分量彼此相加减。
- 向量间点乘:向量的每个分量相乘再相加。
- 向量间叉乘:根据叉乘公式。
- 向量的正交化:向量自身减去在对方上的投影。
- 向量的长度:向量各分量平方再开根。
- 向量的单位向量:向量各分量除以向量的长度。
(5)向量运算实践
- 不妨写一个向量类看看?我很喜欢写基础性代码,下面是我写的向量类代码,请你看看有没有什么问题,如果有欢迎在评论区留言😊
// 向量类的实现
template<typename T>
struct Vector3
{
// 向量类的构造函数
Vector3<T>() :x(0), y(0), z(0) {}
Vector3<T>(T _x, T _y, T _z) : x(_x), y(_y), z(_z) {}
// 向量和常数的乘除法:向量的每个分量和常数相乘除。
Vector3<T> operator*(const T value)const
{
return Vector3<T>(this->x * value, this->y * value, this->z * value);
}
Vector3<T> operator/(const T value)const
{
return Vector3<T>(this->x / value, this->y / value, this->z / value);
}
// 向量间加减法:向量的每个分量彼此相加减。
Vector3<T> operator+(const Vector3<T>& vect)const
{
return Vector3<T>(this->x + vect.x, this->y + vect.y, this->z + vect.z);
}
Vector3<T> operator-(const Vector3<T>& vect)const
{
return Vector3<T>(this->x - vect.x, this->y - vect.y, this->z - vect.z);
}
// 向量间点乘:向量的每个分量相乘再相加。
T Dot(const Vector3<T>& vect)const
{
return (this->x * vect.x + this->y * vect.y + this->z * vect.z);
}
// 向量间叉乘:根据叉乘公式。
T Cross(const Vector3<T>& vect)const
{
return (
this->y * vect.z - this->z * vect.y,
this->z * vect.x - this->x * vect.z,
this->x * vect.y - this->y * vect.x);
}
// 向量的长度:向量各分量平方再开根。
T getLength()const
{
return sqrt(this->x * this->x + this->y * this->y + this->z * this.z);
}
// 向量的单位向量:向量各分量除以向量的长度。
Vector3<T> getNormalizeVect()const
{
T length = getLength();
return (*this) / T;
}
// 向量的正交化:向量自身减去在对方上的投影。
void orthogonal(Vector3<T> vect)const
{
*this = (*this) - (*this).Cross(vect) * vect / vect.getLength() / vect.getLength();
// 设有向量A和B,其长度分别为||A||和||B||,其对应单位向量为nA和nB,它们间夹角为ct
// A点乘B = ||A|| * ||B|| * cos(ct)
// A在B上的投影 = ||A|| * nB * cos(ct)
// = ||A|| * B / ||B|| * cos(ct)
// = A点乘B * B / ||B|| / ||B||
}
union
{
T data[3];
T x, y, z;
};
};
(6)SIMD指令与union
- 你可能主要到对于向量类数据的定义我使用了union,为什么要这样呢?
- 因为对于使用向量类的用户即程序员来说,你在写代码时有时希望向量的各个分量是独立的,这样你可以获取vect.x和vect.y,很自由吧。但是有时你又希望向量的数据是个整体数组,这样你就可像使用指针一样自由的使用data传递参数,使用函数等。因此使用共用体是非常方便的,相当于我们类的数据结构有多种不同的解读方式。
- 通常CPU一次运算只能算个:(a+b) 或者 (a-b),这样我们的两个向量加或减一次,CPU都要计算多次,这很耗费性能。于是构建CPU的人发明出了一些指令,使得CPU一次可以计算:(a1+b1, a2+b2, a3+b3),这样我们的向量运算速度就会成倍提示。这些指令就叫做SIMD。
- SIMD需要参数的一种类型是 __m128,这种变量有128个字节,你可以存储任意数据只要不超过128字节就行,比如我们将上文中(a1,a2,a3)存储到一个 __m128中,就可以与另一个 __m128变量运算。但是出现了一个问题,我们如何将我们的Vector3转换为 __m128呢?这个转换的时间是不可避免的代价,如果处理不好,将导致使用SIMD还不如不使用,因为代价的时间超过了补偿提升性能的时间,导致得不偿失。
(7)DirectXMath中的SIMD
- DirectXMath是一款为Direct3D应用程序专门打造的3D数学库,Windows8及其以上版本都会在自身的Windows SDK中包含DirectXMath。
- DirectXMath采用了 SIMD流指令扩展2 (Streaming SIMD Extensions2 ,简写为SSE2) 指令集。借助128位宽的单指令多数据 (SIMD) 寄存器,利用一条SIMD指令即可同时对4个32位浮点数或整数进行运算,这将极大的提高运算性能。
- 如果你想查找有关DirectXMath的信息,可以在MSDN上查找其在线文档。如果你想提高SIMD设计一个向量库,可以参考Designing Fast Cross-Platform SIMD Vector Libraries。如果你想了解SIMD,我更推荐你先看一下SIMD简介。
- SIMD如今的发展已经很快了,不仅仅具有128位寄存器,正如下图所示还发展出了256和512位寄存器,这代表一次最多可以计算16个32位浮点数。这个数字对于向量来说可能太多了,但是对于矩阵来说就刚好可以利用。
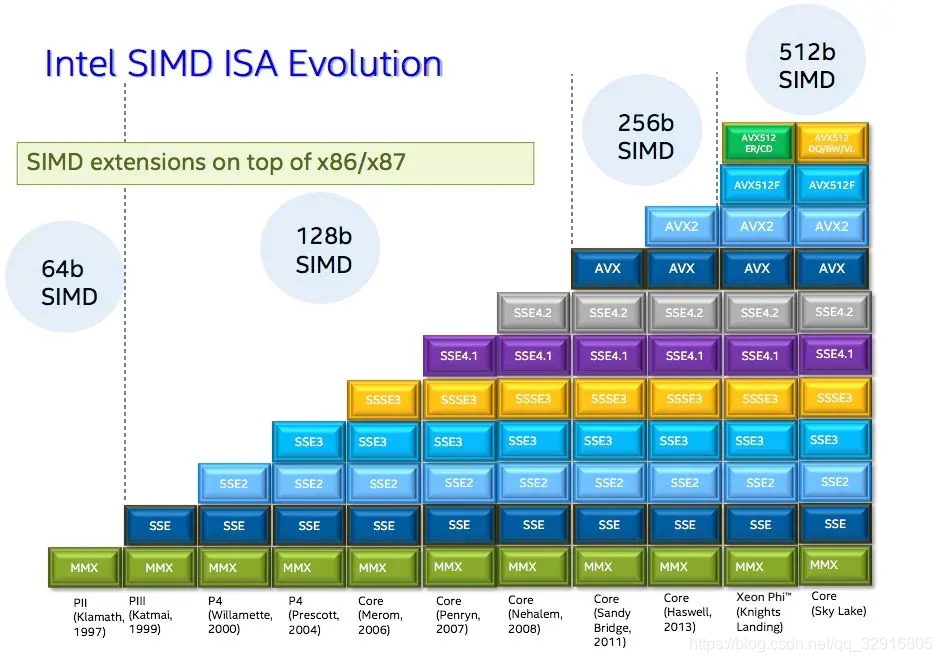
- 极致的性能是每一个男人的追求,理论上最高的512位浮点数可以提高16倍CPU的运算速度,是不是非常诱人?当然我的CPU最高仅支持AVX2,即我最高只能使用256位寄存器,如果你想查看你的CPU支持哪些SIMD指令集,只需要下载软件CPU-Z即可查看。
- 理论上SIMD可以提高数倍CPU的性能。但实际中并非如此,SIMD寄存器位数和对应变量的类型如下图所示:
| SIMD寄存器位数 | 对应变量类型 |
|---|---|
| 128 | __m128 |
| 256 | __m256 |
| 512 | __m512 |
- 64位太low了我就不写了哈。我们使用SIMD提升性能最需要注意的就是类型转换的代价,例如我们使用__m128类型计算向量运算,我们需要先将向量转换为__m128,使用__m128运算后,我们还要将结果类型__m128转换为向量,因此这两次转换就是我们最需要注意的地方。如果转换不好,则性能提升倍数会下降,甚至性能不如不使用SIMD。
- 向量类和SIMD寄存器对应类型之间的转换都要依靠SIMD中的函数实现,有些函数对应一条汇编语言,而有些函数对应多条汇编语言,这会导致性能的差距,因此在选用函数时一定要注意。SIMD小试牛刀的代码可以查看我的这篇文章SIMD初试。
- 对于x86平台需要在项目属性中手动启用SSE2指令集,对于x64位系统则不必开启SSE2指令集,因为所有的x64CPU对此均有支持。
二、 DirectXMath中的向量
(1)XMVECTOR和XMFLOATn
- 在DirectXMath中,核心的向量类型是XMVECTOR,它将被映射到SIMD硬件寄存器。在开启SSE2后,XMVECTOR类型的定义如下所示:
using XMVECTOR = __m128;
- 可见在DirectXMath中核心的向量类其实就是SIMD中的寄存器类型。
- XMVECTOR类型的数据需要按照16字节对齐,这对于局部变量和全局变量都是自动实现的,而对于在类中定义的XMVECTOR类型数据却不会。
- 对于在类中需要定义向量成员属性的情况,应该使用XMFLOATn类进行定义。XMFLAOT3类型的定义如下:
struct XMFLOAT3
{
float x;
float y;
float z;
XMFLOAT3() = default;
XMFLOAT3(const XMFLOAT3&) = default;
XMFLOAT3& operator=(const XMFLOAT3&) = default;
XMFLOAT3(XMFLOAT3&&) = default;
XMFLOAT3& operator=(XMFLOAT3&&) = default;
constexpr XMFLOAT3(float _x, float _y, float _z) noexcept : x(_x), y(_y), z(_z) {}
explicit XMFLOAT3(_In_reads_(3) const float* pArray) noexcept : x(pArray[0]), y(pArray[1]), z(pArray[2]) {}
};
- 可以看到DirectXMath库中定义的XMFLOATn就是一副“空壳”,因为它仅定义了三维向量所具有的数据xyz、构造函数和赋值函数,而没有定义向量的任何一种运算,没有实现向量的加减乘除等任意一种功能。
- 上述的解释是DirectXMath是使用XMVECTOR类型进行向量运算的,也就是说其他XMFLOATn类型要进行向量运算,就必须先转换为XMVECTOR,运算完之后可能还需要将结果转换回XMFLOATn。
- 既然本质都是使用XMVECTOR进行运算,为什么不将XMFLOATn类型直接定义为XMVECTOR类型呢?原因在上文我们已经讲过了,因为XMVECTOR即__m128这种SIMD寄存器类型变量必须要按照16字节对齐,否则就无法达到使用SIMD的条件。当要使用的向量为全局变量或者局部变量时,XMVECTOR变量会自动对齐,因此可以直接使用。而当使用的向量为类中的成员属性时,XMVECTOR变量不会自动对齐,定义了也没有用,因此使用另一种类XMFLOATn作代替。
- 直接使用XMFLOAT128代替XMVECTOR不是即可,为什么要定义多种类型XMFLOATn呢?因为在实际的游戏中,比如你看到满屏幕的弹性球那种画面,每个游戏对象都包含了多个向量属性,在成千上万个游戏对象的情况下,这些对象占用的内存空间是很大的,因此我们要尽量节省每个对象的空间,而节省每个对象的空间就是节省每个对象向量所包含的字节数。XMFLOAT类型占用128个字节,这是CPU开发者规定的,当我们要使用时就必须分配128个字节进行运算。但是在类中记录向量时通常需要很少的字节,比如位置向量就只需要32*3=96个字节,而屏幕坐标等向量只需要64个字节,当然是能省则省,因此将XMFLOAT分化为XMFLOATn。
- 所以总结一下:
1. 局部变量和全局变量使用XMVECTOR类型。
2. 类中的数据成员使用XMFLOATn类型。
3. 运算XMFLOATn类型分为三步:
(1) 将XMFLOATn转换为XMVECTOR。
(2)使用XMVECTOR进行运算。
(3)将XMVECTOR转换回XMFLAOTn。
(2)初试XMVECTOR和XMFLOATn
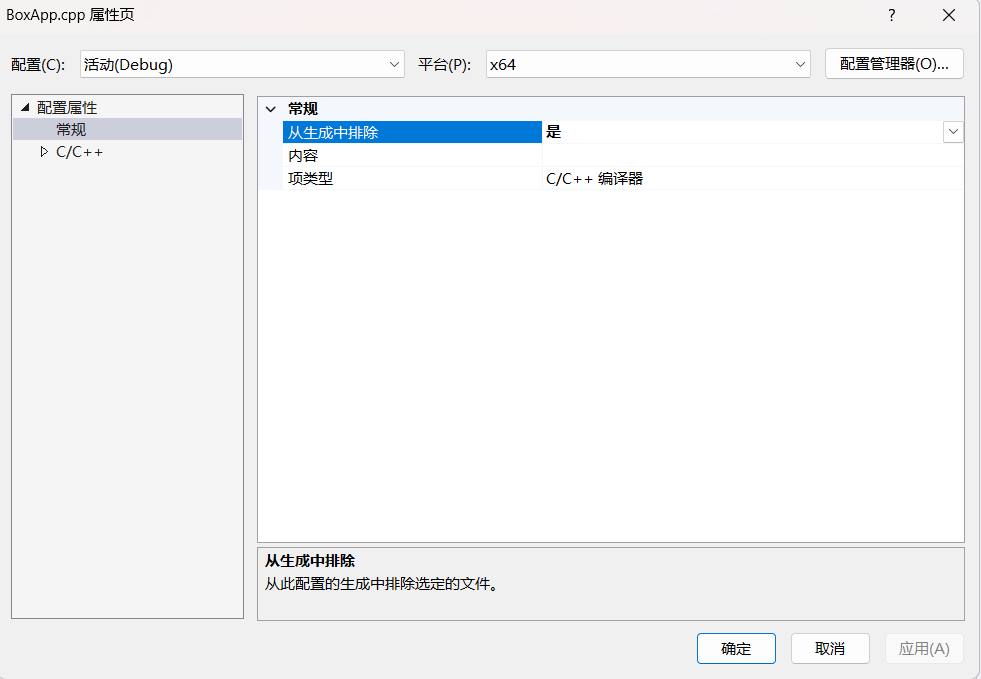
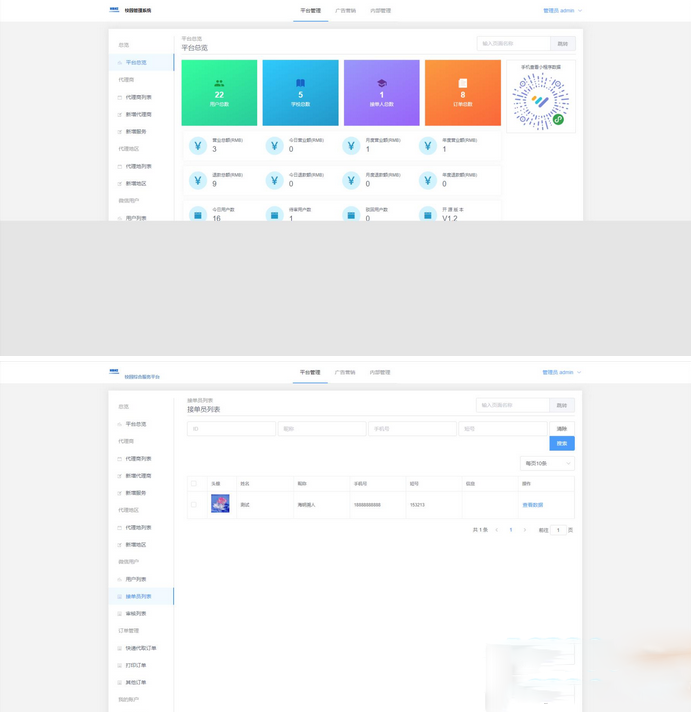
- 学习编程要写代码,不妨在你的项目源文件中新建一个Test.cpp,并在其中编写main函数来编写代码。当然一山不容二虎,如果你现在启动,只能启动到BoxApp.cpp里面的main函数。那么怎么办呢?右键BoxApp.cpp,点击最下面的选项【属性】,再将【从生成中排除】选择为【是】,如下图所示:
- 好了你现在再运行项目就会启动你Test.cpp里面的main函数了,让我们来编写测试代码吧,如下:
#define _CRT_SECURE_NO_WARNINGS // 重定向输入输出(否则默认是没有控制台窗口,你也就看不到输出了,此宏必须写在头文件引用之前!)
#include<windows.h> // Windows API编程所需头文件
#include<DirectXMath.h> // DirectXMath库
#include<iostream>
// Windows API编程的main函数为WinMain,照着写就是了
int WINAPI WinMain(HINSTANCE hInstance, HINSTANCE prevInstance,
PSTR cmdLine, int showCmd)
{
// 这三行代码启动一个控制台,让你的cou和cin绑定控制台
AllocConsole();
freopen("CONOUT$", "w", stdout);
freopen("CONIN$", "r", stdin);
// 定义一个XMVECTOR实例试试
DirectX::XMVECTOR xmvector;
// 由于XMVECTOR即__m128为128位寄存器,所以可以按照不同方式解析数据
// .m128_f32表示将其解析为:存储32位浮点数的数组,然后按照[index]的形式索引即可得到分量xyzw
for (int i = 0; i < 4; i++)
std::cout << xmvector.m128_f32[i] << std::endl;
// 分别定义XMFLAOTn类型
DirectX::XMFLOAT2 xmfloat2;
DirectX::XMFLOAT4 xmflaot4 = DirectX::XMFLOAT4();
xmfloat2.x = 1;
std::cout << xmfloat2.x << std::endl;
std::cout << xmflaot4.x << " " << xmflaot4.y << " " << xmflaot4.z << " " << xmflaot4.w;
while (1); // 阻止程序终止导致控制台关闭无法看到输出信息
return 0;
}
- 运行结果如下:
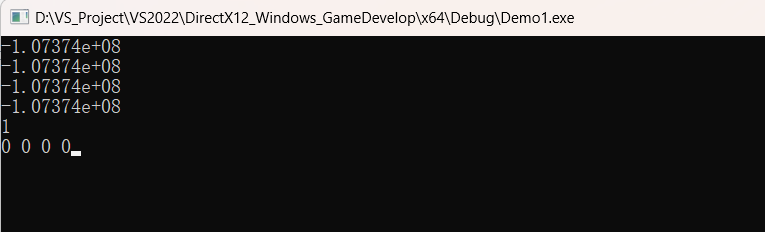
- 需要注意的是,由输出可知:
1. 直接定义的XMVECTOR即__m128,其数据是未初始化即不为零的。
2. 未显示初始化的XMFLOATn变量是无法使用的。上文中我将xmfloat2.x赋值为1,你可以尝试删掉这条语句,程序会报错。即XMVECTOR未显示初始化可使用但值未知,XMFLOATn未显示初始化不可使用否则程序报错。
(3)XMVECTOR和XMFLOATn的互相转换
【1】XMVECTOR和XMFLAOTn之间的直接转换
- 在学习向量运算之前,我们还是先学习一下两种类型之间的转换,即上文运算XMFLOATn步骤中的第一步和第三步。
- 先学习将XMFLOATn类型转换为XMVECTOR类型:
inline XMVECTOR XM_CALLCONV XMLoadFloat2(const XMFLOAT2* pSource) noexcept
{
assert(pSource);
#if defined(_XM_NO_INTRINSICS_)
XMVECTOR V;
V.vector4_f32[0] = pSource->x;
V.vector4_f32[1] = pSource->y;
V.vector4_f32[2] = 0.f;
V.vector4_f32[3] = 0.f;
return V;
#elif defined(_XM_ARM_NEON_INTRINSICS_)
float32x2_t x = vld1_f32(reinterpret_cast<const float*>(pSource));
float32x2_t zero = vdup_n_f32(0);
return vcombine_f32(x, zero);
#elif defined(_XM_SSE_INTRINSICS_)
return _mm_castpd_ps(_mm_load_sd(reinterpret_cast<const double*>(pSource)));
#endif
}
-
可以看到将XMFLOATn转换为XMVECTOR的函数很简单,名为:XMLoadFloatn,参数传入XMFLOATn实例的地址即可。细看函数内部,是通过使用 _mm_castpd_ps 函数实现的类型转换,这函数是SIMD提供的函数。可知DirectXMath不过也只是对SIMD库进行了再一次封装而已。
-
实例代码:
#define _CRT_SECURE_NO_WARNINGS // 重定向输入输出(否则默认是没有控制台窗口,你也就看不到输出了,此宏必须写在头文件引用之前!)
#include<windows.h> // Windows API编程所需头文件
#include<DirectXMath.h> // DirectXMath库
#include<iostream>
// Windows API编程的main函数为WinMain,照着写就是了
int WINAPI WinMain(HINSTANCE hInstance, HINSTANCE prevInstance,
PSTR cmdLine, int showCmd)
{
// 这三行代码启动一个控制台,让你的cou和cin绑定控制台
AllocConsole();
freopen("CONOUT$", "w", stdout);
freopen("CONIN$", "r", stdin);
using namespace DirectX;
XMVECTOR xmvector;
XMFLOAT2 xmfloat2;
XMFLOAT3 xmfloat3;
XMFLOAT4 xmfloat4;
// 将XMFLOATn转换为XMVECTOR
xmvector = XMLoadFloat2(&xmfloat2);
xmvector = XMLoadFloat3(&xmfloat3);
xmvector = XMLoadFloat4(&xmfloat4);
while (1); // 阻止程序终止导致控制台关闭无法看到输出信息
return 0;
}
- 再来学习将XMVECTOR类型转换为XMFLAOTn类型的方法:
inline void XM_CALLCONV XMStoreFloat2
(
XMFLOAT2* pDestination,
FXMVECTOR V
) noexcept
{
assert(pDestination);
#if defined(_XM_NO_INTRINSICS_)
pDestination->x = V.vector4_f32[0];
pDestination->y = V.vector4_f32[1];
#elif defined(_XM_ARM_NEON_INTRINSICS_)
float32x2_t VL = vget_low_f32(V);
vst1_f32(reinterpret_cast<float*>(pDestination), VL);
#elif defined(_XM_SSE_INTRINSICS_)
_mm_store_sd(reinterpret_cast<double*>(pDestination), _mm_castps_pd(V));
#endif
}
- 可以看到将XMVECTOR转换为XMFLOATn类型也是由SIMD的函数 _mm_store_sd 实现的。转换函数名为:XMStoreFloatn。但是参数是两个而且没有返回值,第一个参数是保存结果的XMFLOATn变量的地址,第二个参数是被转换的FXMVECTOR遍历。FXMVECTOR其实就是const XMVECTOR,其类型定义如下:
typedef const XMVECTOR FXMVECTOR;
- 实例代码:
#define _CRT_SECURE_NO_WARNINGS // 重定向输入输出(否则默认是没有控制台窗口,你也就看不到输出了,此宏必须写在头文件引用之前!)
#include<windows.h> // Windows API编程所需头文件
#include<DirectXMath.h> // DirectXMath库
#include<iostream>
// Windows API编程的main函数为WinMain,照着写就是了
int WINAPI WinMain(HINSTANCE hInstance, HINSTANCE prevInstance,
PSTR cmdLine, int showCmd)
{
// 这三行代码启动一个控制台,让你的cou和cin绑定控制台
AllocConsole();
freopen("CONOUT$", "w", stdout);
freopen("CONIN$", "r", stdin);
using namespace DirectX;
XMVECTOR xmvector = XMVECTOR(); // 试试不显示初始化XMVECTOR会怎么样
XMFLOAT2 xmfloat2 = XMFLOAT2(1,2);
XMFLOAT3 xmfloat3;
XMFLOAT4 xmfloat4;
XMStoreFloat2(&xmfloat2, xmvector);
std::cout << xmvector.m128_f32[0] << " " << xmvector.m128_f32[1];
XMStoreFloat3(&xmfloat3, xmvector);
XMStoreFloat4(&xmfloat4, xmvector);
while (1); // 阻止程序终止导致控制台关闭无法看到输出信息
return 0;
}
- 转换XMVECTOR为XMFLOATn选择值返回形式,转换XMFLOATn为XMVECTOR选择无返回值形式,这可能是由于考虑性能而决定的。不同的返回形式转换为汇编代码的数量可能不同,导致性能也就不同。可以看看之前推荐的那篇英文文章,里面介绍了设计SIMD库时需要考虑的代码膨胀。
【2】XMVECTOR获取分量和转换为新XMVECTOR
- 如果我们要获取或设置XMFLAOTn的某个分量,直接.xyz获取或设置即可,但是如果要获取或设置XMVECTOR的某个分量便没有那么容易了。DirectXMath为此提供了专门的函数,获取XMVECTOR某个分量的函数为:
inline float XM_CALLCONV XMVectorGetX(FXMVECTOR V) noexcept
{
#if defined(_XM_NO_INTRINSICS_)
return V.vector4_f32[0];
#elif defined(_XM_ARM_NEON_INTRINSICS_)
return vgetq_lane_f32(V, 0);
#elif defined(_XM_SSE_INTRINSICS_)
return _mm_cvtss_f32(V);
#endif
}
- 函数名为XMVectorGetX,可以看出来也是依靠SIMD的函数实现的,其中可以GetX、Y、Z、W,以此便可获取XMVECTOR的各个分量。
- 根据XMVECTOR变量并设置某个分量创建新的XMVECTOR变量的函数为:
inline XMVECTOR XM_CALLCONV XMVectorSetX(FXMVECTOR V, float x) noexcept
{
#if defined(_XM_NO_INTRINSICS_)
XMVECTORF32 U = { { {
x,
V.vector4_f32[1],
V.vector4_f32[2],
V.vector4_f32[3]
} } };
return U.v;
#elif defined(_XM_ARM_NEON_INTRINSICS_)
return vsetq_lane_f32(x, V, 0);
#elif defined(_XM_SSE_INTRINSICS_)
XMVECTOR vResult = _mm_set_ss(x);
vResult = _mm_move_ss(V, vResult);
return vResult;
#endif
}
- 毫无疑问其也是使用SIMD函数实现的,函数名为:XMVectorSetX,当然也可以是SetY、Z和W。要注意的是这个函数的作用是返回一个新的XMVECTOR变量,其值除了被设置的那个分量外都与原XMVECTOR变量相等。
- 实例如下:
#define _CRT_SECURE_NO_WARNINGS // 重定向输入输出(否则默认是没有控制台窗口,你也就看不到输出了,此宏必须写在头文件引用之前!)
#include<windows.h> // Windows API编程所需头文件
#include<DirectXMath.h> // DirectXMath库
#include<iostream>
// Windows API编程的main函数为WinMain,照着写就是了
int WINAPI WinMain(HINSTANCE hInstance, HINSTANCE prevInstance,
PSTR cmdLine, int showCmd)
{
// 这三行代码启动一个控制台,让你的cou和cin绑定控制台
AllocConsole();
freopen("CONOUT$", "w", stdout);
freopen("CONIN$", "r", stdin);
using namespace DirectX;
// 获取XMVECTOR的分量
XMVECTOR xmvector1 = XMVECTOR();
std::cout << XMVectorGetX(xmvector1) <<" "
<< XMVectorGetY(xmvector1) <<" "
<< XMVectorGetZ(xmvector1) << std::endl;
// 设置XMVECTOR的分量
XMVECTOR xmvector2 = XMVectorSetX(xmvector1, 1);
std::cout << XMVectorGetX(xmvector2) << std::endl;
while (1); // 阻止程序终止导致控制台关闭无法看到输出信息
return 0;
}
- 运行结果如下:

- 可以看到DirectXMath中的核心向量XMVECTOR就是__m128,当然可能会因为硬件的不同而不同。我想说的是DirectXMath就是对SIMD的一次封装而已,基本上向量和矩阵库都要使用SIMD,而对于游戏SIMD几乎是不可或缺。因此我建议大家去学习SIMD相关知识,这样才能了解到问题的本质,这样你才会在使用任何向量和矩阵库时了解到设计的原因。当然这也有利于你在使用XMVECTOR时提高效率,目前SIMD已经支持了最高512位的寄存器和运算,但是DirectXMath还是使用的128位运算,尽管我的CPU支持256位寄存器和运算,它还是如此,因此自己掌握才是真的掌握!SIMD是CPU的指令,因此帮助文档基本上都在各CPU开发商的官网上,Intel SIMD帮助文档,Arm SIMD帮助文档。
(4)参数的传递
- 为了提高运算效率,可以将XMVECTOR类型的值作为函数的参数。直接传送至SSE/SSE2寄存器里,而不存在stack内。以此方式传递的参数数量取决于用户使用的平台(32位windows、64位windows)和编译器。因此为了使代码更具通用性,不受具体平台和编译器的影响,我们利用FXMVECTOR、GXMVECTOR、HXMVECTOR和CXMVECTOR等类型来传递XMVECTOR类型的参数。基于平台和编译器,它们会自动定义为适当的类型。此外,一定要把调用约定注解XM_CALLCONV加在函数名之前,它会根据编译器版本确定出对应的调用约定属性。
- 传递XMVECTOR参数的规则如下:
&esmp;1. 前三个XMVECTOR参数应当用类型FXMVECTOR。
&esmp;2. 第四个XMVECTOR参数应当用类型GXMVECTOR。
&esmp;3. 第5、6个XMVECTOR参数应当用类型HXMVECTOR。
&esmp;4. 其余的XMVECTOR参数应当用类型CXMVECTOR。
&esmp;5.





![buuctf-[WUSTCTF2020]CV Maker](https://img-blog.csdnimg.cn/b89cf572a8b544f79d35ad553c93897c.png)