1、算法描述
1. LMS算法: LMS(Least Mean Square)算法是一种自适应滤波算法。其核心思想是通过最小化输入信号和期望响应之间的均方误差来调整滤波器的权重。
LMS算法的更新公式为:w(n+1)=w(n)+μe(n)x(n) 其中,
- w(n) 为在时间n处的权重向量。
- μ 是步长因子,其值决定了算法的收敛速度和稳定性。
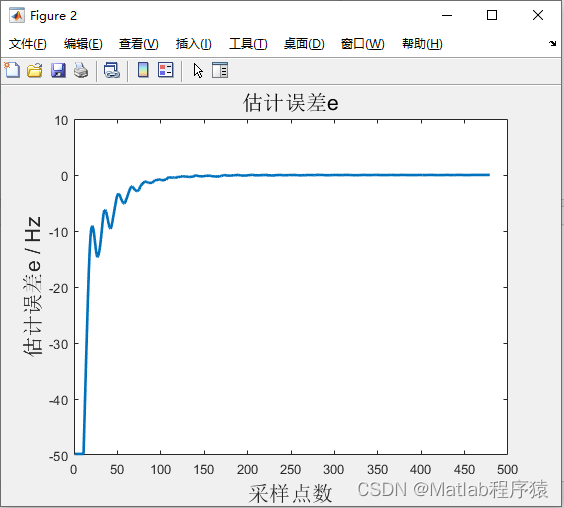
- e(n) 是在时间n处的误差信号,定义为期望响应和滤波器的实际输出之间的差异。
- x(n) 是在时间n处的输入信号。
2. 陷波器: 陷波器是一种滤波器,设计目的是为了在某个特定频率处提供较强的衰减,从而“陷入”那些不需要的频率成分,而在其他频率处保持响应平坦。常见的应用场合包括消除某些特定频率的干扰。
3. LMS与陷波器结合用于频率估计: 当干扰的频率未知时,我们可以使用LMS算法的自适应性质来自动调整陷波器的参数,从而使其对齐于干扰的频率,达到消除干扰的目的。这种自适应陷波器可以通过LMS算法的权重更新机制来不断估计干扰频率,并相应地调整陷波频率。
具体过程如下:
- 初始化权重向量和步长因子。
- 为输入信号施加陷波滤波。
- 计算滤波器输出与期望响应之间的误差。
- 使用LMS算法更新权重。
- 重复2-4步骤,直到权重收敛。
当权重收敛后,陷波滤波器的中心频率即为所估计的干扰频率。
2、仿真结果演示

3、关键代码展示
略
4、MATLAB 源码获取
点击下方名片
v