目录
一、实验介绍
二、实验环境
1. 配置虚拟环境
2. 库版本介绍
三、实验内容
0. 导入必要的工具包
1. 构建数据集(CIFAR10Dataset)
a. read_csv_labels()
b. CIFAR10Dataset
2. 构建模型(FeedForward)
3.整合训练、评估、预测过程(Runner)
4. __main__
代码整合
一、实验介绍
本实验实现了一个简化版VGG网络,并基于此完成图像分类任务。(包括模型训练、评价)
VGG网络是深度卷积神经网络中的经典模型之一,由牛津大学计算机视觉组(Visual Geometry Group)提出。它在2014年的ImageNet图像分类挑战中取得了优异的成绩(分类任务第二,定位任务第一),被广泛应用于图像分类、目标检测和图像生成等任务。
VGG网络的主要特点是使用了非常小的卷积核尺寸(通常为3x3)和更深的网络结构。该网络通过多个卷积层和池化层堆叠在一起,逐渐增加网络的深度,从而提取图像的多层次特征表示。VGG网络的基本构建块是由连续的卷积层组成,每个卷积层后面跟着一个ReLU激活函数。在每个卷积块的末尾,都会添加一个最大池化层来减小特征图的尺寸。VGG网络的这种简单而有效的结构使得它易于理解和实现,并且在不同的任务上具有很好的泛化性能。
VGG网络有几个不同的变体,如VGG11、VGG13、VGG16和VGG19,它们的数字代表网络的层数。这些变体在网络深度和参数数量上有所区别,较深的网络通常具有更强大的表示能力,但也更加复杂。

二、实验环境
本系列实验使用了PyTorch深度学习框架,相关操作如下:
1. 配置虚拟环境
conda create -n DL python=3.7 conda activate DLpip install torch==1.8.1+cu102 torchvision==0.9.1+cu102 torchaudio==0.8.1 -f https://download.pytorch.org/whl/torch_stable.html
conda install matplotlib conda install scikit-learn2. 库版本介绍
| 软件包 | 本实验版本 | 目前最新版 |
| matplotlib | 3.5.3 | 3.8.0 |
| numpy | 1.21.6 | 1.26.0 |
| python | 3.7.16 | |
| scikit-learn | 0.22.1 | 1.3.0 |
| torch | 1.8.1+cu102 | 2.0.1 |
| torchaudio | 0.8.1 | 2.0.2 |
| torchvision | 0.9.1+cu102 | 0.15.2 |
三、实验内容
ChatGPT:
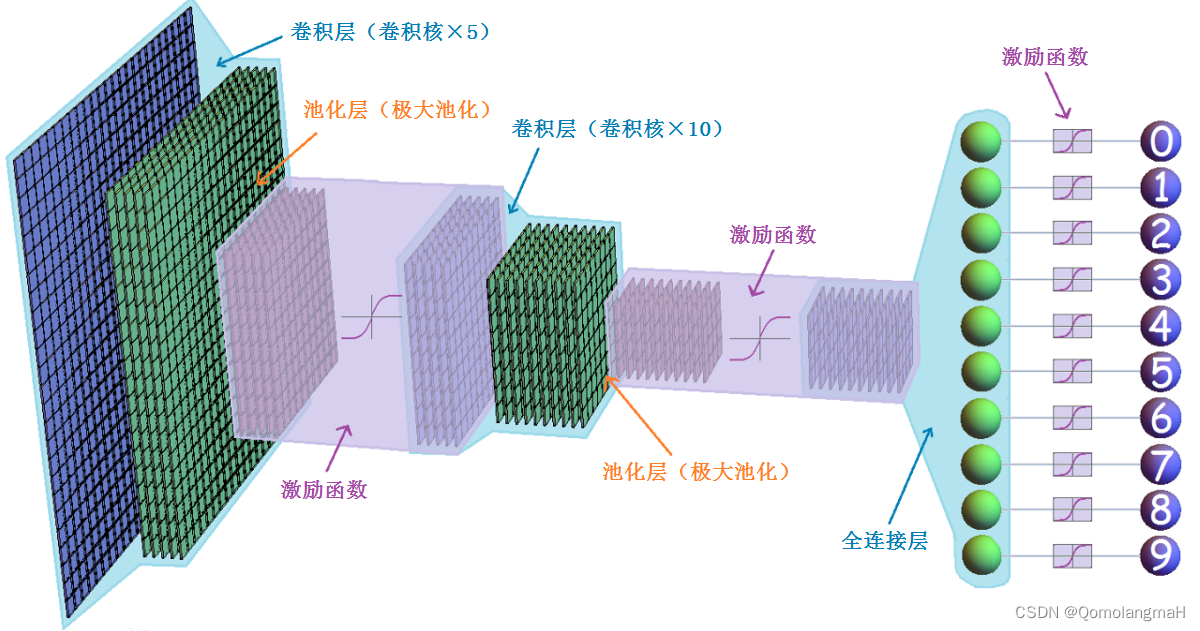
卷积神经网络(Convolutional Neural Network,简称CNN)是一种深度学习模型,广泛应用于图像识别、计算机视觉和模式识别等领域。它的设计灵感来自于生物学中视觉皮层的工作原理。
卷积神经网络通过多个卷积层、池化层和全连接层组成。
- 卷积层主要用于提取图像的局部特征,通过卷积操作和激活函数的处理,可以学习到图像的特征表示。
- 池化层则用于降低特征图的维度,减少参数数量,同时保留主要的特征信息。
- 全连接层则用于将提取到的特征映射到不同类别的概率上,进行分类或回归任务。
卷积神经网络在图像处理方面具有很强的优势,它能够自动学习到具有层次结构的特征表示,并且对平移、缩放和旋转等图像变换具有一定的不变性。这些特点使得卷积神经网络成为图像分类、目标检测、语义分割等任务的首选模型。除了图像处理,卷积神经网络也可以应用于其他领域,如自然语言处理和时间序列分析。通过将文本或时间序列数据转换成二维形式,可以利用卷积神经网络进行相关任务的处理。
0. 导入必要的工具包
import torch
from torch import nn
import torch.nn.functional as F1. 构建数据集(CIFAR10Dataset)
a. read_csv_labels()
从CSV文件中读取标签信息并返回一个标签字典。
def read_csv_labels(fname):
"""读取fname来给标签字典返回一个文件名"""
with open(fname, 'r') as f:
# 跳过文件头行(列名)
lines = f.readlines()[1:]
tokens = [l.rstrip().split(',') for l in lines]
return dict(((name, label) for name, label in tokens))-
使用
open函数打开指定文件名的CSV文件,并将文件对象赋值给变量f。这里使用'r'参数以只读模式打开文件。 -
使用文件对象的
readlines()方法读取文件的所有行,并将结果存储在名为lines的列表中。通过切片操作[1:],跳过了文件的第一行(列名),将剩余的行存储在lines列表中。 -
列表推导式(list comprehension):对
lines列表中的每一行进行处理。对于每一行,使用rstrip()方法去除行末尾的换行符,并使用split(',')方法将行按逗号分割为多个标记。最终,将所有行的标记组成的子列表存储在tokens列表中。 -
使用字典推导式(dictionary comprehension)将
tokens列表中的子列表转换为字典。对于tokens中的每个子列表,将子列表的第一个元素作为键(name),第二个元素作为值(label),最终返回一个包含这些键值对的字典。
b. CIFAR10Dataset
class CIFAR10Dataset(Dataset):
def __init__(self, folder_path, fname):
self.labels = read_csv_labels(os.path.join(folder_path, fname))
self.folder_path = os.path.join(folder_path, 'train')
def __len__(self):
return len(self.labels)
def __getitem__(self, idx):
img = read_image(self.folder_path + '/' + str(idx + 1) + '.png')
label = self.labels[str(idx + 1)]
return img, torch.tensor(int(label))-
构造函数:
-
接受两个参数
-
folder_path表示数据集所在的文件夹路径 -
fname表示包含标签信息的文件名。
-
-
调用
read_csv_labels函数,传递folder_path和fname作为参数,以读取CSV文件中的标签信息,并将返回的标签字典存储在self.labels变量中。 -
通过拼接
folder_path和字符串'train'来构建数据集的文件夹路径,将结果存储在self.folder_path变量中。
-
-
def __len__(self)-
这是
CIFAR10Dataset类的方法,用于返回数据集的长度,即样本的数量。
-
-
def __getitem__(self, idx): 这是CIFAR10Dataset类的方法,用于根据给定的索引idx获取数据集中的一个样本。它首先根据索引idx构建图像文件的路径,并调用read_image函数来读取图像数据,将结果存储在img变量中。然后,它通过将索引转换为字符串,并使用该字符串作为键来从self.labels字典中获取相应的标签,将结果存储在label变量中。最后,它返回一个元组,包含图像数据和经过torch.tensor转换的标签。
2. 构建模型(FeedForward)
参考前文:
【深度学习实验】卷积神经网络(五):深度卷积神经网络经典模型——VGG网络(卷积层、池化层、全连接层)_QomolangmaH的博客-CSDN博客![]() https://blog.csdn.net/m0_63834988/article/details/133350927?spm=1001.2014.3001.5501
https://blog.csdn.net/m0_63834988/article/details/133350927?spm=1001.2014.3001.5501
3.整合训练、评估、预测过程(Runner)
参考前文:
【深度学习实验】前馈神经网络(九):整合训练、评估、预测过程(Runner)_QomolangmaH的博客-CSDN博客![]() https://blog.csdn.net/m0_63834988/article/details/133219448?spm=1001.2014.3001.5501
https://blog.csdn.net/m0_63834988/article/details/133219448?spm=1001.2014.3001.5501
(略有改动:)
class Runner(object):
def __init__(self, model, optimizer, loss_fn, metric=None):
self.model = model
self.optimizer = optimizer
self.loss_fn = loss_fn
# 用于计算评价指标
self.metric = metric
# 记录训练过程中的评价指标变化
self.dev_scores = []
# 记录训练过程中的损失变化
self.train_epoch_losses = []
self.dev_losses = []
# 记录全局最优评价指标
self.best_score = 0
# 模型训练阶段
def train(self, train_loader, dev_loader=None, **kwargs):
# 将模型设置为训练模式,此时模型的参数会被更新
self.model.train()
num_epochs = kwargs.get('num_epochs', 0)
log_steps = kwargs.get('log_steps', 100)
save_path = kwargs.get('save_path','best_model.pth')
eval_steps = kwargs.get('eval_steps', 0)
# 运行的step数,不等于epoch数
global_step = 0
if eval_steps:
if dev_loader is None:
raise RuntimeError('Error: dev_loader can not be None!')
if self.metric is None:
raise RuntimeError('Error: Metric can not be None')
# 遍历训练的轮数
for epoch in range(num_epochs):
total_loss = 0
# 遍历数据集
for step, data in enumerate(train_loader):
x, y = data
logits = self.model(x.float())
loss = self.loss_fn(logits, y.long())
total_loss += loss
if step%log_steps == 0:
print(f'loss:{loss.item():.5f}')
loss.backward()
self.optimizer.step()
self.optimizer.zero_grad()
# 每隔一定轮次进行一次验证,由eval_steps参数控制,可以采用不同的验证判断条件
if eval_steps != 0 :
if (epoch+1) % eval_steps == 0:
dev_score, dev_loss = self.evaluate(dev_loader, global_step=global_step)
print(f'[Evalute] dev score:{dev_score:.5f}, dev loss:{dev_loss:.5f}')
if dev_score > self.best_score:
self.save_model(f'model_{epoch+1}.pth')
print(f'[Evaluate]best accuracy performance has been updated: {self.best_score:.5f}-->{dev_score:.5f}')
self.best_score = dev_score
# 验证过程结束后,请记住将模型调回训练模式
self.model.train()
global_step += 1
# 保存当前轮次训练损失的累计值
train_loss = (total_loss/len(train_loader)).item()
self.train_epoch_losses.append((global_step,train_loss))
self.save_model(f'{save_path}.pth')
print('[Train] Train done')
# 模型评价阶段
def evaluate(self, dev_loader, **kwargs):
assert self.metric is not None
# 将模型设置为验证模式,此模式下,模型的参数不会更新
self.model.eval()
global_step = kwargs.get('global_step',-1)
total_loss = 0
self.metric.reset()
for batch_id, data in enumerate(dev_loader):
x, y = data
logits = self.model(x.float())
loss = self.loss_fn(logits, y.long()).item()
total_loss += loss
self.metric.update(logits, y)
dev_loss = (total_loss/len(dev_loader))
self.dev_losses.append((global_step, dev_loss))
dev_score = self.metric.accumulate()
self.dev_scores.append(dev_score)
return dev_score, dev_loss
# 模型预测阶段,
def predict(self, x, **kwargs):
self.model.eval()
logits = self.model(x)
return logits
# 保存模型的参数
def save_model(self, save_path):
torch.save(self.model.state_dict(), save_path)
# 读取模型的参数
def load_model(self, model_path):
self.model.load_state_dict(torch.load(model_path, map_location=torch.device('cpu')))4. __main__
batch_size = 20
# 构建训练集
train_data = CIFAR10Dataset('cifar10_tiny', 'trainLabels.csv')
train_iter = DataLoader(train_data, batch_size=batch_size)
# 构建测试集
num_classes = 10
# 定义模型
model = VGG_S(num_classes)
# 定义损失函数
loss_fn = F.cross_entropy
# 定义优化器
optimizer = torch.optim.SGD(model.parameters(), lr=0.1)
runner = Runner(model, optimizer, loss_fn, metric=None)
runner.train(train_iter, num_epochs=10, save_path='chapter_5')本文有待进一步完善……