UNet网络训练
训练资源
构建好UNet网络模型后,需要进行训练。但是训练需要特别多的原始图像和标签图像,对于一般而言这一步特别繁琐,不过在网上有一些免费的数据集可以让我们省略这一步,直接进行训练测试。
VOC(Visual Object Classes)数据集是一个广泛使用的计算机视觉数据集,主要用于目标检测、图像分割和图像分类等任务。VOC数据集最初由英国牛津大学的计算机视觉小组创建,并在PASCAL VOC挑战赛中使用。
VOC数据集包含各种不同类别的标记图像,每个图像都有与之相关联的边界框(bounding box)和对象类别的标签。数据集中包括了20个常见的目标类别,例如人、汽车、猫、狗等。此外,VOC数据集还提供了用于图像分割任务的像素级标注。
VOC数据集涵盖了多个年度的发布,每个年度的数据集包含训练集、验证集和测试集。训练集用于模型的训练和参数优化,验证集用于模型的调参和性能评估,而测试集则用于最终模型的性能评估和比较。
VOC数据集:https://host.robots.ox.ac.uk/pascal/VOC/voc2007/
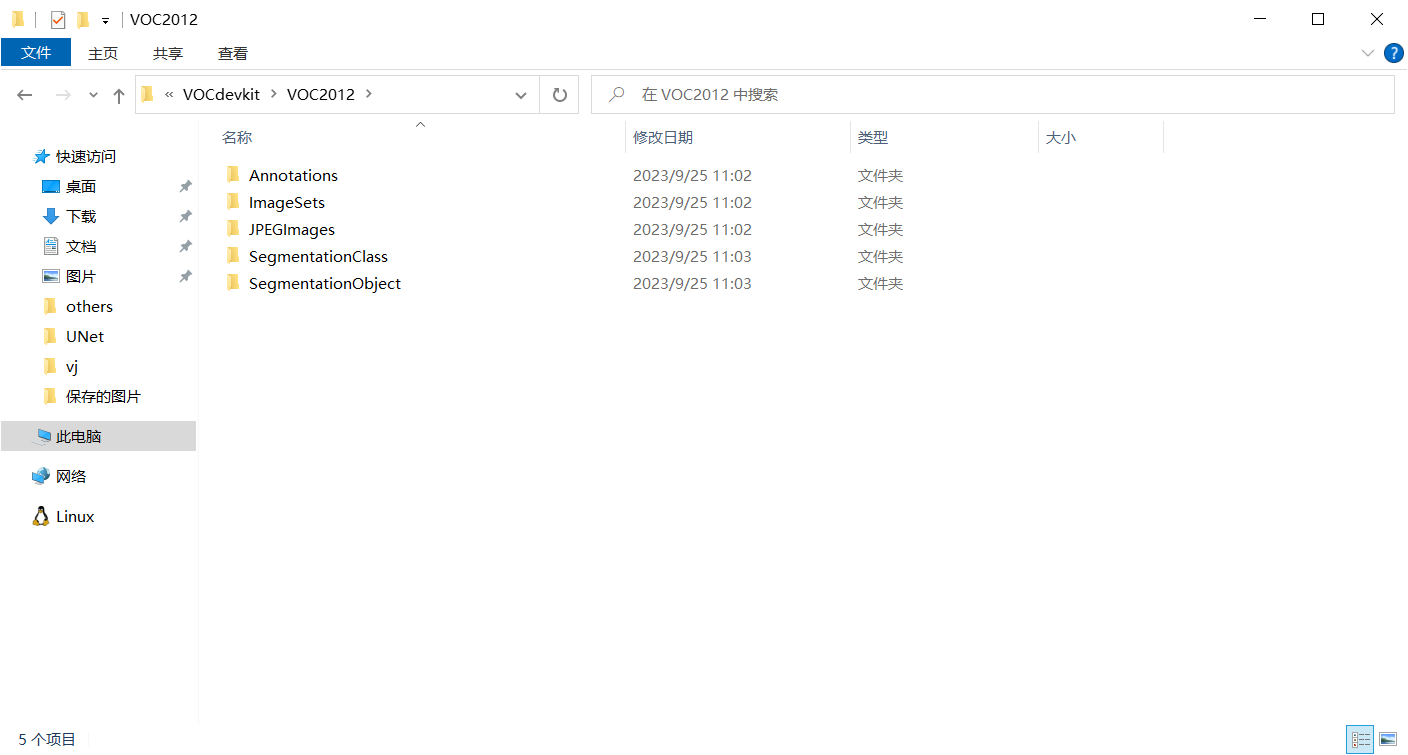
一般目标检测只需用到Annotations、ImageSets、JPEGImages这3个文件夹,剩下的可以删掉。
Annotations:存放xml格式的标注文件
JPEGImages:该文件夹存储了 VOC 数据集中的图像数据。
ImageSets:该文件夹包含了几个用于数据集划分和评估的文本文件。
SegmentationClass:包含了每个图像像素的语义类别标注信息。
训练
创建一个Dataloader对象用来加载自定义数据集。
进入训练循环,每个 epoch 遍历一遍数据集。对于每个 batch,将输入数据和真实标签拷贝到计算设备上,并进行前向推理得到输出结果。计算输出结果与真实标签之间的交叉熵损失,并计算梯度并反向传播。每隔一定的周期,打印当前的训练损失并保存模型权重。另外,在每个 batch 中,将输入、真实标签和输出结果合并成一张图像,保存到指定的路径中,用于观察训练效果。
from torch import nn,optim # 优化器
import torch
from torch.utils.data import DataLoader # 用于加载自定义数据集类
from data import * # 导入自定义类
from net import * # 导入UNet网络模型
from torchvision.utils import save_image # 导入保存图像方法
# 如果有cuda,就用;否则就用cpu
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
# 权重 用于存储和加载训练好的Unet深度学习模型的权重或参数。".pth" 是PyTorch模型文件的命名约定。
weight_path = "params/unet.pth"
# 数据集路径
data_path = r"E:\Undergraduate\School\Scientific_research\ML\Machine_Learning\lab\图形分割\Unet模型总\VOCdevkit\VOC2012"
# 训练结果图像保存路径
save_path = "train_image"
# 在主程序中运行
if __name__ == "__main__":
# 创建数据加载器对象,MyDataset 是自定义的数据集类,用于加载训练数据,batch_size=2 表示每次训练使用的图像数量为 2。
data_loader = DataLoader(MyDataset(data_path), batch_size=2, shuffle=True)
# 实例化UNet网络模型 通过 .to(device) 将模型移动到指定的设备上。
net = UNet().to(device)
# 检查是否存在预训练的模型权重文件,如果存在则加载权重到模型中,否则输出提示信息。
if os.path.exists(weight_path):
net.load_state_dict(torch.load(weight_path))
print("Successful load weight!")
else:
print("Not successful load weight")
# 创建优化器和损失函数对象
opt = optim.Adam(net.parameters())
loss_fun = nn.BCELoss()
# 设置起始训练轮数,并开始训练
epoch = 1
while True:
# 遍历数据加载器中的每个批次,将图像数据和分割图像数据移动到指定设备上。
for i, (image, segment_image) in enumerate(data_loader):
image, segment_image = image.to(device), segment_image.to(device)
# 前向传播计算网络输出结果,并计算训练损失。
out_image = net(image)
train_loss = loss_fun(out_image, segment_image)
# 梯度清零,反向传播计算梯度。
opt.zero_grad()
train_loss.backward()
# 隔一段时间进行打印信息
if i%5 == 0:
print(f"{epoch} {i} - train_loss ==>{train_loss.item()}")
if i%50 == 0:
torch.save(net.state_dict(), weight_path)
# 从批次中取出第一张图像、分割图像和网络输出结果。将图像、分割图像和网络输出结果按顺序堆叠,并保存为图像文件。
_image = image[0]
_segment_image = segment_image[0]
_out_image = out_image[0]
img = torch.stack([_image, _segment_image, _out_image],dim = 0)
save_image(img, f"{save_path}/{i}.png")
epoch += 1