特征值和特征向量
本章特征值和特征向量的概念只在方阵的范畴内探讨。
相似矩阵
Grant:线性变换对应的矩阵依赖于所选择的基。
一般情况下,同一个线性变换在不同基下的矩阵不同。仍然以平面线性变换为例,Grant 选用标准坐标系下的基向量 i , j \mathbf i,\mathbf j i,j ,线性变换 T T T 对应的矩阵为 A A A ,而 Jennifer 使用另外一组基向量 i ′ , j ′ \mathbf i',\mathbf j' i′,j′ 。
我们已经知道矩阵 A A A 是追踪基向量 i , j \mathbf i,\mathbf j i,j 变换后的位置得到的,同样的线性变换在 i ′ , j ′ \mathbf i',\mathbf j' i′,j′ 下的表示,也需要追踪基向量 i ′ , j ′ \mathbf i',\mathbf j' i′,j′ 变换后的位置。具体过程如下:
对于 Jennifer 视角下的向量 v = [ x ′ y ′ ] \mathbf v=\begin{bmatrix} x' \\ y' \end{bmatrix} v=[x′y′]
- 同样的向量,用 Grant 的坐标系表示的坐标为 P [ x ′ y ′ ] P\begin{bmatrix} x' \\ y' \end{bmatrix} P[x′y′] ,其中 P P P 为基变换矩阵;
- 用 Grant 的语言描述变换后的向量 A P [ x ′ y ′ ] AP\begin{bmatrix} x' \\ y' \end{bmatrix} AP[x′y′]
- 将变换后的结果变回 Jennifer 的坐标系 P − 1 A P [ x ′ y ′ ] P^{-1}AP\begin{bmatrix} x' \\ y' \end{bmatrix} P−1AP[x′y′]
于是,我们得到同一个线性变换 T T T 在 Jennifer 的坐标系下对应的矩阵为 P − 1 A P P^{-1}AP P−1AP 。
这个结果暗示着数学上的转移作用,中间的矩阵 A A A 代表 Grant 坐标系下所见到的变换, P P P 和 P − 1 P^{-1} P−1 两个矩阵代表着转移作用(基变换矩阵),也就是在不同坐标系之间进行转换,实际上也是视角上的转化。 P − 1 A P P^{-1}AP P−1AP 仍然代表同一个变换,只不过是从别的坐标系的角度来看。
下面给出严格的数学证明。在线性空间
V
V
V 中取两组基,基变换公式为
(
b
1
,
b
2
,
⋯
,
b
n
)
=
(
a
1
,
a
2
,
⋯
,
a
n
)
P
(\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n)=(\mathbf a_1,\mathbf a_2,\cdots,\mathbf a_n)P
(b1,b2,⋯,bn)=(a1,a2,⋯,an)P 。
设线性变换
T
T
T 在这两组基下的矩阵分别为
A
A
A 和
B
B
B 。那么
T
(
a
1
,
a
2
,
⋯
,
a
n
)
=
(
a
1
,
a
2
,
⋯
,
a
n
)
A
T
(
b
1
,
b
2
,
⋯
,
b
n
)
=
(
b
1
,
b
2
,
⋯
,
b
n
)
B
T(\mathbf a_1,\mathbf a_2,\cdots,\mathbf a_n)=(\mathbf a_1,\mathbf a_2,\cdots,\mathbf a_n)A \\ T(\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n)=(\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n)B
T(a1,a2,⋯,an)=(a1,a2,⋯,an)AT(b1,b2,⋯,bn)=(b1,b2,⋯,bn)B
取向量
v
∈
V
\mathbf v\in V
v∈V ,在两组基下的坐标向量分别为
x
,
x
′
\mathbf x,\mathbf x'
x,x′,根据坐标变换公式有
x
=
P
x
′
\mathbf x=P\mathbf x'
x=Px′
T
(
v
)
=
(
b
1
,
b
2
,
⋯
,
b
n
)
B
x
′
=
(
a
1
,
a
2
,
⋯
,
a
n
)
A
x
=
(
b
1
,
b
2
,
⋯
,
b
n
)
P
−
1
A
P
x
′
\begin{aligned} T(\mathbf v)&=(\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n)B\mathbf x'\\ &=(\mathbf a_1,\mathbf a_2,\cdots,\mathbf a_n)A\mathbf x \\ &=(\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n)P^{-1}AP\mathbf x' \end{aligned}
T(v)=(b1,b2,⋯,bn)Bx′=(a1,a2,⋯,an)Ax=(b1,b2,⋯,bn)P−1APx′
因为
b
1
,
b
2
,
⋯
,
b
n
\mathbf b_1,\mathbf b_2,\cdots,\mathbf b_n
b1,b2,⋯,bn 线性无关,所以
B
=
P
−
1
A
P
B=P^{-1}AP
B=P−1AP
因此, B B B 和 P − 1 A P P^{-1}AP P−1AP 表示同一种线性变换在不同基向量下的表示。
相似矩阵:设
A
,
B
A,B
A,B 都是
n
n
n 阶矩阵,若有
n
n
n 阶可逆矩阵
P
P
P ,使
B
=
P
−
1
A
P
B=P^{-1}AP
B=P−1AP
则称矩阵
A
A
A 与
B
B
B 相似(similar),记作
A
∼
B
A\sim B
A∼B。
用初等行变换计算相似矩阵:计算相似矩阵 P − 1 A P P^{-1}AP P−1AP 的一种有效方法是先计算 A P AP AP ,然后用行变换将增广矩阵 ( P ∣ A P ) (P\mid AP) (P∣AP) 化为 ( I ∣ P − 1 A P ) (I\mid P^{-1}AP) (I∣P−1AP),这样就不需要单独计算 P − 1 P^{-1} P−1了 。
特征值与特征向量
Grant:行列式告诉你一个变换对面积的缩放比例,特征向量则是在变换中保留在他所张成的空间中的向量,这两者都是暗含于空间中的性质,坐标系的选择并不会改变他们最根本的值。
我们已经知道,对角阵对于矩阵运算来说最为简单。若线性变换 T T T 在一组基下的矩阵为 A A A,为便于应用,自然考虑是否存在对角阵 Λ \Lambda Λ 和矩阵 A A A 相似,从而使用这种最简单的形式计算线性变换。
假设有对角阵
Λ
∼
A
\Lambda\sim A
Λ∼A,即存在可逆矩阵
P
P
P ,使得
P
−
1
A
P
=
Λ
=
diag
(
λ
1
,
λ
2
,
⋯
,
λ
n
)
P^{-1}AP=\Lambda=\text{diag}(\lambda_1,\lambda_2,\cdots,\lambda_n)
P−1AP=Λ=diag(λ1,λ2,⋯,λn)
将矩阵
P
P
P 按列分块
P
=
(
x
1
,
x
2
,
⋯
,
x
n
)
P=(\mathbf x_1,\mathbf x_2,\cdots,\mathbf x_n)
P=(x1,x2,⋯,xn) ,则上式等价于
A
(
x
1
,
x
2
,
⋯
,
x
n
)
=
(
x
1
,
x
2
,
⋯
,
x
n
)
Λ
A(\mathbf x_1,\mathbf x_2,\cdots,\mathbf x_n)=(\mathbf x_1,\mathbf x_2,\cdots,\mathbf x_n)\Lambda
A(x1,x2,⋯,xn)=(x1,x2,⋯,xn)Λ
按分块矩阵的乘法,上式可写成
A
x
1
=
λ
1
x
1
A
x
2
=
λ
1
x
2
⋯
A
x
n
=
λ
n
x
n
A\mathbf x_1=\lambda_1\mathbf x_1\\ A\mathbf x_2=\lambda_1\mathbf x_2\\ \cdots\\ A\mathbf x_n=\lambda_n\mathbf x_n
Ax1=λ1x1Ax2=λ1x2⋯Axn=λnxn
根据假定
P
P
P 可逆,其列向量非零,因此我们希望找到符合条件的
λ
j
,
x
j
\lambda_j,\mathbf x_j
λj,xj。
定义:对于矩阵
A
A
A ,如果存在数
λ
\lambda
λ 和非零向量
u
\mathbf u
u,使得
A
u
=
λ
u
A\mathbf u=\lambda\mathbf u
Au=λu
则称 λ \lambda λ 是矩阵 A A A 的一个特征值(eigenvalue), u \mathbf u u 是特征值 λ \lambda λ 的一个特征向量(eigenvector)。
(1) 特征向量必须是非零向量;
(2) 特征值和特征向量是相伴出现的。
事实上,对于任意非零常数
c
c
c,
c
u
c\mathbf u
cu 都是特征值
λ
\lambda
λ 的特征向量,这是因为
if
A
u
=
λ
u
,
then
A
(
c
u
)
=
λ
(
c
u
)
\text{if }A\mathbf u=\lambda\mathbf u,\text{ then }A(c\mathbf u)=\lambda (c\mathbf u)
if Au=λu, then A(cu)=λ(cu)
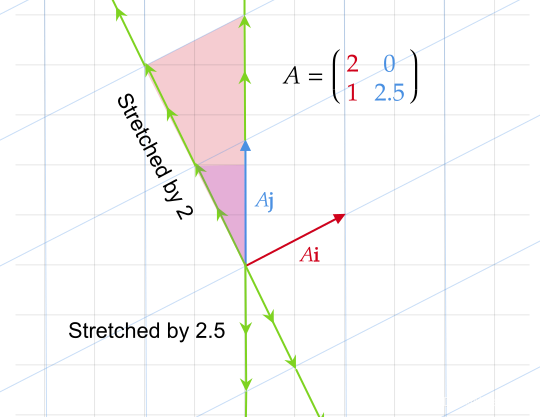
由于矩阵和线性变换是一一对应的,我们可以借助几何直观理解这个定义。
- 特征向量在变换过程中只受到拉伸或者压缩
- 特征值描述对应特征向量经过线性变换后的缩放程度
对于三维空间中的旋转,如果能够找到对应的特征向量,也即能够留在它所张成的空间中的向量,那么就意味着我们找到了旋转轴。特别地,这就意味着将一个三维旋转看成绕这个特征向量旋转一定角度,要比考虑相应的矩阵变换要直观。此时对应的特征值为1,因为旋转并不改变任何一个向量,所以向量的长度保持不变。
由定义知道,求解特征向量就是寻找非零向量
u
\mathbf u
u 使得
(
A
−
λ
I
)
u
=
0
(A-\lambda I)\mathbf u=0
(A−λI)u=0
显然,
u
=
0
\mathbf u=0
u=0 时恒成立,但是我们要寻找的是非零解。 齐次矩阵方程有非零解的充分必要条件是系数矩阵的行列式为零,即
det
(
A
−
λ
I
)
=
0
\det(A-\lambda I)=0
det(A−λI)=0
也就是系数矩阵所代表的线性变换将空间压缩到更低的维度。上式称为矩阵
A
A
A 的特征方程(characteristic equation)。矩阵
A
A
A 的特征值就是它的特征方程的根。
多项式
f
(
λ
)
=
det
(
A
−
λ
I
)
f(\lambda)=\det(A-\lambda I)
f(λ)=det(A−λI)
称为矩阵
A
A
A 的特征多项式(characteristic polynomial)。
由上面的讨论可以得出求 n n n阶矩阵 A A A的特征值与特征向量的简要步骤:
- 求出 A A A 的特征多项式,即计算 n n n阶行列式 det ( A − λ I ) \det(A-\lambda I) det(A−λI);
- 求解特征方程 det ( A − λ I ) = 0 \det(A-\lambda I)=0 det(A−λI)=0 ,得到 n n n个根,即为 A A A的 n n n 个特征值;
- 对求得的每个特征值 λ i \lambda_i λi 分别带入 ( A − λ I ) x = 0 (A-\lambda I)\mathbf x=0 (A−λI)x=0 求其非零解,便是对应的特征向量。
示例:求矩阵 A = [ 1 2 3 2 ] A=\begin{bmatrix}1&2\\3&2\end{bmatrix} A=[1322] 的特征值和特征向量。
解:
A
A
A 的特征多项式为
det
(
A
−
λ
I
)
=
∣
1
−
λ
2
3
2
−
λ
∣
=
λ
2
−
3
λ
−
4
=
(
λ
−
4
)
(
λ
+
1
)
\begin{aligned}\det(A-\lambda I)&=\begin{vmatrix}1-\lambda&2\\3&2-\lambda\end{vmatrix} \\ &=\lambda^2-3\lambda-4=(\lambda-4)(\lambda+1) \end{aligned}
det(A−λI)=
1−λ322−λ
=λ2−3λ−4=(λ−4)(λ+1)
因此
A
A
A 的特征值为
λ
1
=
4
,
λ
2
=
−
1
\lambda_1=4,\lambda_2=-1
λ1=4,λ2=−1。
将
λ
1
=
4
\lambda_1=4
λ1=4 带入矩阵方程
(
A
−
λ
I
)
x
=
0
(A-\lambda I)\mathbf x=0
(A−λI)x=0 ,有
[
−
3
2
3
−
2
]
[
x
1
x
2
]
=
0
[
−
3
2
3
−
2
]
→
[
3
−
2
0
0
]
\begin{bmatrix}-3&2\\3&-2\end{bmatrix}\begin{bmatrix}x_1\\x_2\end{bmatrix}=0 \\ \begin{bmatrix}-3&2\\3&-2\end{bmatrix}\to\begin{bmatrix}3&-2\\0&0\end{bmatrix}
[−332−2][x1x2]=0[−332−2]→[30−20]
求得特征值
λ
1
=
4
\lambda_1=4
λ1=4 对应的一个特征向量
u
1
=
c
[
2
3
]
\mathbf u_1=c\begin{bmatrix}2\\3\end{bmatrix}
u1=c[23]
将
λ
1
=
−
1
\lambda_1=-1
λ1=−1 带入矩阵方程
(
A
−
λ
I
)
x
=
0
(A-\lambda I)\mathbf x=0
(A−λI)x=0 ,有
[
2
2
3
3
]
[
x
1
x
2
]
=
0
[
2
2
3
3
]
→
[
1
1
0
0
]
\begin{bmatrix}2&2\\3&3\end{bmatrix}\begin{bmatrix}x_1\\x_2\end{bmatrix}=0 \\ \begin{bmatrix}2&2\\3&3\end{bmatrix}\to\begin{bmatrix}1&1\\0&0\end{bmatrix}
[2323][x1x2]=0[2323]→[1010]
求得特征值
λ
2
=
−
1
\lambda_2=-1
λ2=−1 对应的特征向量
u
2
=
c
[
−
1
1
]
\mathbf u_2=c\begin{bmatrix}-1\\1\end{bmatrix}
u2=c[−11]
性质:
- 相似矩阵(同样的线性变换)有相同的特征多项式,从而有相同的特征值;
- 矩阵 A A A 与其转置矩阵 A T A^T AT 有相同的特征值;
- 属于矩阵不同特征值的特征向量线性无关;
- 矩阵的所有特征值之和等于其主对角线元素之和(矩阵的迹);
- 矩阵的所有特征值之积等于矩阵的行列式;
- 三角阵的特征值是其主对角线元素;
- 矩阵乘积 A B AB AB 和 B A BA BA 具有相同的非零特征值
证明:(性质1)设
A
∼
B
A\sim B
A∼B,即
B
=
P
−
1
A
P
B=P^{-1}AP
B=P−1AP ,于是
det
(
B
−
λ
I
)
=
det
(
P
−
1
(
A
−
λ
I
)
P
)
=
det
(
P
−
1
)
det
(
A
−
λ
I
)
det
(
P
)
=
det
(
A
−
λ
I
)
\begin{aligned} \det(B-\lambda I)&=\det(P^{-1}(A-\lambda I)P) \\ &=\det(P^{-1})\det(A-\lambda I)\det(P) \\ &=\det(A-\lambda I) \\ \end{aligned}
det(B−λI)=det(P−1(A−λI)P)=det(P−1)det(A−λI)det(P)=det(A−λI)
故
A
A
A 与
B
B
B 有相同的特征多项式,从而有相同的特征值
(性质4)设
n
n
n阶矩阵
A
A
A 的特征值为
λ
1
,
λ
2
,
⋯
,
λ
n
\lambda_1,\lambda_2,\cdots,\lambda_n
λ1,λ2,⋯,λn。由于矩阵的特征值就是其特征方程的根,从而
f
(
λ
)
=
det
(
A
−
λ
I
)
=
(
λ
1
−
λ
)
(
λ
2
−
λ
)
⋯
(
λ
n
−
λ
)
f(\lambda)=\det(A-\lambda I)=(\lambda_1-\lambda)(\lambda_2-\lambda)\cdots(\lambda_n-\lambda)
f(λ)=det(A−λI)=(λ1−λ)(λ2−λ)⋯(λn−λ)
上式取
λ
=
0
\lambda=0
λ=0 ,有
f
(
0
)
=
det
A
=
λ
1
λ
2
⋯
λ
n
f(0)=\det A=\lambda_1\lambda_2\cdots\lambda_n
f(0)=detA=λ1λ2⋯λn
(性质7)假设矩阵 A A A 与 B B B 分别是 m × n m\times n m×n 与 n × m n\times m n×m 矩阵。
证法1:设 λ \lambda λ 是 A B AB AB 的任一非零特征值, u \mathbf u u 是这一特征值的特征向量,则 ( A B ) u = λ u (AB)\mathbf u=\lambda\mathbf u (AB)u=λu ,等式两边同时左乘 B B B 有
( B A ) ( B u ) = λ ( B u ) (BA)(B\mathbf u)=\lambda(B\mathbf u) (BA)(Bu)=λ(Bu)
又由于 A B u = λ u ≠ 0 AB\mathbf u=\lambda\mathbf u\neq0 ABu=λu=0 可知 B u ≠ 0 B\mathbf u\neq 0 Bu=0 。所以 B u B\mathbf u Bu 是 B A BA BA 关于特征值 λ \lambda λ 的特征向量。这也证明了 λ \lambda λ 也是 B A BA BA 的特征值。
同理可证 B A BA BA 的非零特征值也是 A B AB AB 的特征值。这就证明了 A B AB AB 和 B A BA BA 具有相同的非零特征值。
证法2:易知
[
I
m
−
A
O
I
n
]
[
A
B
O
B
O
]
[
I
m
A
O
I
n
]
=
[
O
O
B
A
B
]
\begin{bmatrix}I_m&-A\\O&I_n\end{bmatrix} \begin{bmatrix}AB&O\\B&O\end{bmatrix} \begin{bmatrix}I_m&A\\O&I_n\end{bmatrix}= \begin{bmatrix}O&O\\B&AB\end{bmatrix}
[ImO−AIn][ABBOO][ImOAIn]=[OBOAB]
又由于
[
I
m
−
A
O
I
n
]
[
I
m
A
O
I
n
]
=
I
m
+
n
\begin{bmatrix}I_m&-A\\O&I_n\end{bmatrix} \begin{bmatrix}I_m&A\\O&I_n\end{bmatrix}= I_{m+n}
[ImO−AIn][ImOAIn]=Im+n
可知
[
A
B
O
B
O
]
∼
[
O
O
B
B
A
]
\begin{bmatrix}AB&O\\B&O\end{bmatrix}\sim \begin{bmatrix}O&O\\B&BA\end{bmatrix}
[ABBOO]∼[OBOBA]
它们有相同的特征多项式,即
λ
n
det
(
λ
I
m
−
A
B
)
=
λ
m
det
(
λ
I
n
−
B
A
)
\lambda^n\det(\lambda I_m-AB)=\lambda^m\det(\lambda I_n-BA)
λndet(λIm−AB)=λmdet(λIn−BA)
上式称为Sylvester降幂公式。这里表明, A B AB AB 和 B A BA BA 的只相差了个 m − n m-n m−n 个零特征值,其余非零特征值相同。
特征基与对角化
由上节知道,特征值和特征向量定义的初衷是为了线性变换的相似对角化,即
P
−
1
A
P
=
Λ
P^{-1}AP=\Lambda
P−1AP=Λ
由定义的推理知道,矩阵
A
A
A 的每个特征向量就是
P
P
P 的一个列向量,而
P
P
P 是矩阵
A
A
A 的基向量到对角阵
Λ
\Lambda
Λ 基向量的过渡矩阵。过渡矩阵
P
P
P 也可看作对角阵
Λ
\Lambda
Λ 的基向量组在矩阵
A
A
A 基向量下的坐标,所以对基向量的限制条件也适用于特征向量组。
定理:矩阵 A n A_n An 可以相似对角化的充要条件是 A n A_n An 有 n n n 个线性无关的特征向量。此时,对角元素就是对应的特征值。
设矩阵
A
A
A的特征值与特征向量对应关系
A
u
1
=
λ
1
u
1
,
A
u
2
=
λ
2
u
2
A\mathbf u_1=\lambda_1\mathbf u_1,\quad A\mathbf u_2=\lambda_2\mathbf u_2
Au1=λ1u1,Au2=λ2u2 ,令
P
=
[
u
1
,
u
2
]
P=[\mathbf u_1,\mathbf u_2]
P=[u1,u2]
A
P
=
[
λ
1
u
1
,
λ
2
u
2
]
=
[
u
1
,
u
2
]
[
λ
1
0
0
λ
2
]
=
P
Λ
AP=[\lambda_1\mathbf u_1,\lambda_2\mathbf u_2]= [\mathbf u_1,\mathbf u_2] \begin{bmatrix} \lambda_1&0 \\ 0&\lambda_2 \end{bmatrix}= P\Lambda \\
AP=[λ1u1,λ2u2]=[u1,u2][λ100λ2]=PΛ
若
P
P
P 可逆,即
u
1
,
u
2
\mathbf u_1,\mathbf u_2
u1,u2 线性无关,则
Λ
=
P
−
1
A
P
=
[
λ
1
0
0
λ
2
]
\Lambda=P^{-1}AP=\begin{bmatrix} \lambda_1&0 \\ 0&\lambda_2 \end{bmatrix}
Λ=P−1AP=[λ100λ2]
当特征向量的数量足够多时,这些特征向量就可以构成特征基(eigenbasis)。在特征基坐标系角度看,同一个线性变换只是伸缩变换(对角阵)。
特征基的坐标使用的是矩阵 A A A 的基向量。
例:尝试将下列矩阵对角化
A
=
[
1
3
3
−
3
−
5
−
3
3
3
1
]
A=\begin{bmatrix} 1&3&3 \\ -3&-5&-3 \\ 3&3&1 \end{bmatrix}
A=
1−333−533−31
解:对角化工作可分为4步来完成
step 1:求出特征值。矩阵
A
A
A 的特征方程为
det
(
A
−
λ
I
)
=
−
(
λ
−
1
)
(
λ
+
2
)
2
\det(A-\lambda I)=-(\lambda-1)(\lambda+2)^2
det(A−λI)=−(λ−1)(λ+2)2
特征值是
λ
=
1
\lambda=1
λ=1 和
λ
=
−
2
\lambda=-2
λ=−2
step 2:求出线性无关的特征向量。对于 λ = 1 \lambda=1 λ=1 的特征向量 u 1 = ( 1 , − 1 , 1 ) T \mathbf u_1=(1,-1,1)^T u1=(1,−1,1)T
对于 λ = − 2 \lambda=-2 λ=−2 的特征向量 u 2 = ( − 1 , 1 , 0 ) T \mathbf u_2=(-1,1,0)^T u2=(−1,1,0)T 和 u 3 = ( − 1 , 0 , 1 ) T \mathbf u_3=(-1,0,1)^T u3=(−1,0,1)T
可以验证 u 1 , u 2 , u 3 \mathbf u_1,\mathbf u_2,\mathbf u_3 u1,u2,u3 是线性无关的。
step 3:使用特征向量构造过渡矩阵(向量的次序不重要)
P
=
[
1
−
1
−
1
−
1
1
0
1
0
1
]
P=\begin{bmatrix} 1&-1&-1 \\ -1&1&0 \\ 1&0&1 \end{bmatrix}
P=
1−11−110−101
step 4:使用对应的特征值构造对角阵(特征值的次序必须和矩阵
P
P
P的列选择的特征向量的次序一致)
Λ
=
[
1
0
0
0
−
2
0
0
0
−
2
]
\Lambda=\begin{bmatrix} 1&0&0 \\ 0&-2&0 \\ 0&0&-2 \end{bmatrix}
Λ=
1000−2000−2
可简单验证
A
P
=
P
Λ
AP=P\Lambda
AP=PΛ,这等价于验证当
P
P
P 可逆时
Λ
=
P
−
1
A
P
\Lambda=P^{-1}AP
Λ=P−1AP 。
一些常见变换的特征值与特征向量列举如下:
(1) 等比例缩放变换 [ k 0 0 k ] \begin{bmatrix}k &0\\0 &k\end{bmatrix} [k00k] 的特征多项式为 ( λ − k ) 2 (\lambda-k)^2 (λ−k)2 ,有两个相等的特征值 λ = k \lambda=k λ=k ,但平面内任意非零向量都属于这个特征值的特征向量。
(2) 普通缩放变换 [ k 1 0 0 k 2 ] \begin{bmatrix}k_1 &0\\0 &k_2\end{bmatrix} [k100k2] 的特征多项式为 ( λ − k 1 ) ( λ − k 2 ) (\lambda-k_1)(\lambda-k_2) (λ−k1)(λ−k2) ,有两个特征值 λ 1 = k 1 , λ 2 = k 2 \lambda_1=k_1,\lambda_2=k_2 λ1=k1,λ2=k2 ,特征向量分别为 u 1 = [ 1 0 ] , u 2 = [ 0 1 ] \mathbf u_1=\begin{bmatrix}1\\0\end{bmatrix},\mathbf u_2=\begin{bmatrix}0\\1\end{bmatrix} u1=[10],u2=[01]。
(3) 旋转变换 [ cos θ − sin θ sin θ cos θ ] \begin{bmatrix}\cos\theta &-\sin\theta\\ \sin\theta &\cos\theta\end{bmatrix} [cosθsinθ−sinθcosθ] 的特征多项式为 λ 2 + 2 λ cos θ + 1 \lambda^2+2\lambda\cos\theta+1 λ2+2λcosθ+1 ,有两个复特征值 λ 1 = cos θ + i sin θ , λ 2 = cos θ − i sin θ \lambda_1=\cos\theta+i\sin\theta,\lambda_2=\cos\theta-i\sin\theta λ1=cosθ+isinθ,λ2=cosθ−isinθ ,对应两个复特征向量 u 1 = [ 1 − i ] , u 2 = [ 1 i ] \mathbf u_1=\begin{bmatrix}1\\-i\end{bmatrix},\mathbf u_2=\begin{bmatrix}1\\i\end{bmatrix} u1=[1−i],u2=[1i]。
值得注意的是,特征值出现虚数的情况一般对应于变换中的某一种旋转。
(4) 水平剪切变换 [ 1 k 0 1 ] \begin{bmatrix}1 &k\\0 &1\end{bmatrix} [10k1] 的特征多项式为 ( λ − 1 ) 2 (\lambda-1)^2 (λ−1)2 ,有两个相等的特征值 λ = 1 \lambda=1 λ=1 ,只有一个特征向量 u 1 = [ 1 0 ] \mathbf u_1=\begin{bmatrix}1\\0\end{bmatrix} u1=[10] ,不能张成整个平面。
特征向量的应用
许多实际问题都可归结为研究矩阵的方幂 A n ( n ∈ N ∗ ) A^n\quad (n\in\N^*) An(n∈N∗) 乘以向量 v \mathbf v v ,不难想象,当方幂很大时,直接用矩阵的乘法、矩阵与向量的乘法进行计算会非常麻烦。而矩阵的特征值和特征向量矩阵对幂运算十分友好,因此在数学和实际问题中有着广泛的应用。
性质:
-
设矩阵 A A A 特征值 λ \lambda λ 的特征向量为 u \mathbf u u,则用数学归纳法可以得到
A n u = λ n u A^n\mathbf u=\lambda^n\mathbf u Anu=λnu -
设矩阵 A A A 特征值 λ 1 , λ 2 \lambda_1,\lambda_2 λ1,λ2 的特征向量分别为 u 1 , u 2 \mathbf u_1,\mathbf u_2 u1,u2。对于任意向量 v \mathbf v v ,可以用特征向量线性表示 v = v 1 u 1 + v 2 u 2 \mathbf v=v_1\mathbf u_1+v_2\mathbf u_2 v=v1u1+v2u2 。那么,用数学归纳法可以得到
A n v = v 1 λ 1 n u 1 + v 2 λ 2 n u 2 A^n\mathbf v=v_1\lambda_1^n\mathbf u_1+v_2\lambda_2^n\mathbf u_2 Anv=v1λ1nu1+v2λ2nu2
证明:从线性变换的角度理解,性质1中矩阵 A A A 只是对特征向量做伸缩变换,因此矩阵幂的效果等价于特征值(缩放比例)的幂。性质2中矩阵的幂变换等同于切换到特征基中做了同等次数的伸缩变换。
性质1用数学归纳法证明:
(1) 当
n
=
1
n=1
n=1 时
A
u
=
λ
u
A\mathbf u=\lambda\mathbf u
Au=λu
(2) 假设当
n
=
k
−
1
n=k-1
n=k−1 时成立,即
A
k
−
1
u
=
λ
k
−
1
u
A^{k-1}\mathbf u=\lambda^{k-1}\mathbf u
Ak−1u=λk−1u
当
n
=
k
n=k
n=k 时,因为
A
k
u
=
A
(
A
k
−
1
u
)
=
A
(
λ
k
−
1
u
)
=
λ
k
−
1
(
A
u
)
=
λ
k
u
A^k\mathbf u=A(A^{k-1}\mathbf u)=A(\lambda^{k-1}\mathbf u)=\lambda^{k-1}(A\mathbf u)=\lambda^k\mathbf u
Aku=A(Ak−1u)=A(λk−1u)=λk−1(Au)=λku
所以,对 n = k n=k n=k 时成立。由数学归纳法可知,对所有的 n ∈ N ∗ n\in\N^* n∈N∗ 都成立。
实例:在扩散理论中的应用。设某物质能以气态和液态的混合状态存在,假定在任意一段很短的时间内
(1) 液体的
5
%
5\%
5% 蒸发成气态;
(2) 气体的
1
%
1\%
1% 凝结成液态。
假定该物质的总量一直保持不变,那么最终的情况如何?
为了研究的方便,用 g 0 , l 0 g_0,l_0 g0,l0 分别表示现在的气体和液体的比例 ( g 0 + l 0 = 1 ) (g_0+l_0=1) (g0+l0=1), g n , l n g_n,l_n gn,ln 分别表示 n n n 段时间后液体和气体的比例。记物质总量为 M M M ,一直保持不变。
(1) 先求 g 1 , l 1 g_1,l_1 g1,l1
可以看出,在很短时间后,气体由现在气体的
99
%
99\%
99% 加上现在液体的
5
%
5\%
5% 组成,即
g
1
M
=
0.99
g
0
M
+
0.05
l
0
M
g_1M=0.99g_0M+0.05l_0M
g1M=0.99g0M+0.05l0M
同理,在很短时间后的液体
l
1
M
=
0.01
g
0
M
+
0.95
l
0
M
l_1M=0.01g_0M+0.95l_0M
l1M=0.01g0M+0.95l0M
因此
{
g
1
=
0.99
g
0
+
0.05
l
0
l
1
=
0.01
g
0
+
0.95
l
0
\begin{cases} g_1=0.99g_0+0.05l_0 \\ l_1=0.01g_0+0.95l_0 \end{cases}
{g1=0.99g0+0.05l0l1=0.01g0+0.95l0
矩阵形式为
[
g
1
l
1
]
=
[
0.99
0.05
0.01
0.95
]
[
g
0
l
0
]
\begin{bmatrix} g_1\\l_1 \end{bmatrix}= \begin{bmatrix} 0.99&0.05\\0.01&0.95 \end{bmatrix} \begin{bmatrix} g_0\\l_0 \end{bmatrix}
[g1l1]=[0.990.010.050.95][g0l0]
记矩阵
P
=
[
0.99
0.05
0.01
0.95
]
P=\begin{bmatrix} 0.99&0.05\\0.01&0.95 \end{bmatrix}
P=[0.990.010.050.95] 则上式写为
[
g
1
l
1
]
=
P
[
g
0
l
0
]
\begin{bmatrix} g_1\\l_1 \end{bmatrix}=P\begin{bmatrix} g_0\\l_0 \end{bmatrix}
[g1l1]=P[g0l0]
矩阵
P
P
P 记录了很短时间内气液的转变情况。
(2) 类似与
g
1
,
l
1
g_1,l_1
g1,l1 的推导过程,可以得到
[
g
1
l
1
]
=
P
[
g
0
l
0
]
;
[
g
2
l
2
]
=
P
[
g
1
l
1
]
=
P
2
[
g
0
l
0
]
;
⋯
⋯
[
g
n
l
n
]
=
P
[
g
n
−
1
l
n
−
1
]
=
P
n
[
g
0
l
0
]
\begin{aligned} & \begin{bmatrix} g_1\\l_1 \end{bmatrix}=P\begin{bmatrix} g_0\\l_0 \end{bmatrix}; \\ & \begin{bmatrix} g_2\\l_2 \end{bmatrix}=P\begin{bmatrix} g_1\\l_1 \end{bmatrix}=P^2\begin{bmatrix} g_0\\l_0 \end{bmatrix}; \\ & \cdots\cdots \\ & \begin{bmatrix} g_n\\l_n \end{bmatrix}=P\begin{bmatrix} g_{n-1}\\l_{n-1} \end{bmatrix}=P^n\begin{bmatrix} g_0\\l_0 \end{bmatrix} \end{aligned}
[g1l1]=P[g0l0];[g2l2]=P[g1l1]=P2[g0l0];⋯⋯[gnln]=P[gn−1ln−1]=Pn[g0l0]
由于该问题已转化为矩阵指数的形式,我们可以用矩阵特征值和特征向量的性质求解。
(3) 可以证明矩阵
A
=
[
1
−
p
q
p
1
−
q
]
(
0
<
p
,
q
<
1
)
A=\begin{bmatrix}1-p & q\\ p &1-q\end{bmatrix}\quad (0<p,q<1)
A=[1−ppq1−q](0<p,q<1)
的特征值是
λ
1
=
1
,
λ
2
=
1
−
p
−
q
\lambda_1=1,\ \lambda_2=1-p-q
λ1=1, λ2=1−p−q,对应的特征向量分别是
u
1
=
[
q
p
]
,
u
2
=
[
1
−
1
]
\mathbf u_1=\begin{bmatrix} q\\ p\end{bmatrix},\ \mathbf u_2=\begin{bmatrix} 1\\ -1\end{bmatrix}
u1=[qp], u2=[1−1]。
从而得到矩阵
P
P
P 的特征值是
λ
1
=
1
,
λ
2
=
0.94
\lambda_1=1,\ \lambda_2=0.94
λ1=1, λ2=0.94,对应的特征向量分别是
u
1
=
[
0.05
0.01
]
,
u
2
=
[
1
−
1
]
\mathbf u_1=\begin{bmatrix} 0.05\\ 0.01\end{bmatrix},\ \mathbf u_2=\begin{bmatrix} 1\\ -1\end{bmatrix}
u1=[0.050.01], u2=[1−1]。再把初始向量
[
g
0
l
0
]
\begin{bmatrix} g_0\\l_0 \end{bmatrix}
[g0l0] 用特征向量表示,设
[
g
0
l
0
]
=
k
1
[
0.05
0.01
]
+
k
2
[
1
−
1
]
where
g
0
+
l
0
=
1
\begin{bmatrix} g_0\\l_0 \end{bmatrix}=k_1\begin{bmatrix} 0.05\\ 0.01\end{bmatrix}+k_2\begin{bmatrix} 1\\ -1\end{bmatrix}\quad\text{where }g_0+l_0=1
[g0l0]=k1[0.050.01]+k2[1−1]where g0+l0=1
解得
k
1
=
50
3
,
k
2
=
g
0
−
5
6
k_1=\frac{50}{3},k_2=g_0-\frac{5}{6}
k1=350,k2=g0−65 ,所以由性质2得,对于任意的自然数
n
n
n 有
[
g
n
l
n
]
=
P
n
[
g
0
l
0
]
=
k
1
×
1
n
[
0.05
0.01
]
+
k
2
×
0.9
4
n
[
1
−
1
]
\begin{bmatrix} g_n\\l_n \end{bmatrix}=P^n\begin{bmatrix} g_0\\l_0 \end{bmatrix}=k_1\times1^n\begin{bmatrix} 0.05\\ 0.01\end{bmatrix}+k_2\times0.94^n\begin{bmatrix} 1\\ -1\end{bmatrix}
[gnln]=Pn[g0l0]=k1×1n[0.050.01]+k2×0.94n[1−1]
从而
g
n
=
0.05
k
1
+
0.9
4
n
k
2
,
l
n
=
0.01
k
1
−
0.9
4
n
k
2
g_n=0.05k_1+0.94^nk_2,\ l_n=0.01k_1-0.94^nk_2
gn=0.05k1+0.94nk2, ln=0.01k1−0.94nk2,所以
g
∞
=
lim
n
→
∞
(
0.05
k
1
+
0.9
4
n
k
2
)
=
0.05
k
1
=
5
6
l
∞
=
lim
n
→
∞
(
0.01
k
1
−
0.9
4
n
k
2
)
=
0.01
k
1
=
1
6
g_{\infty}=\lim\limits_{n\to\infty}(0.05k_1+0.94^nk_2)=0.05k_1=\frac{5}{6} \\ l_{\infty}=\lim\limits_{n\to\infty}(0.01k_1-0.94^nk_2)=0.01k_1=\frac{1}{6}
g∞=n→∞lim(0.05k1+0.94nk2)=0.05k1=65l∞=n→∞lim(0.01k1−0.94nk2)=0.01k1=61
那么,我们可以得到,不管该物质最初的气液比率如何,最终将达到一个平衡状态,此时该物质的
5
/
6
5/6
5/6 是气态的,
1
/
6
1/6
1/6 是液体的。