最近有相关需求制作,所以这里编写一个文档,方便后续的流程查看。
下载源码
由于unity内置的shader是无法查看源码的,你需要去官网下载对应版本内置源码查看
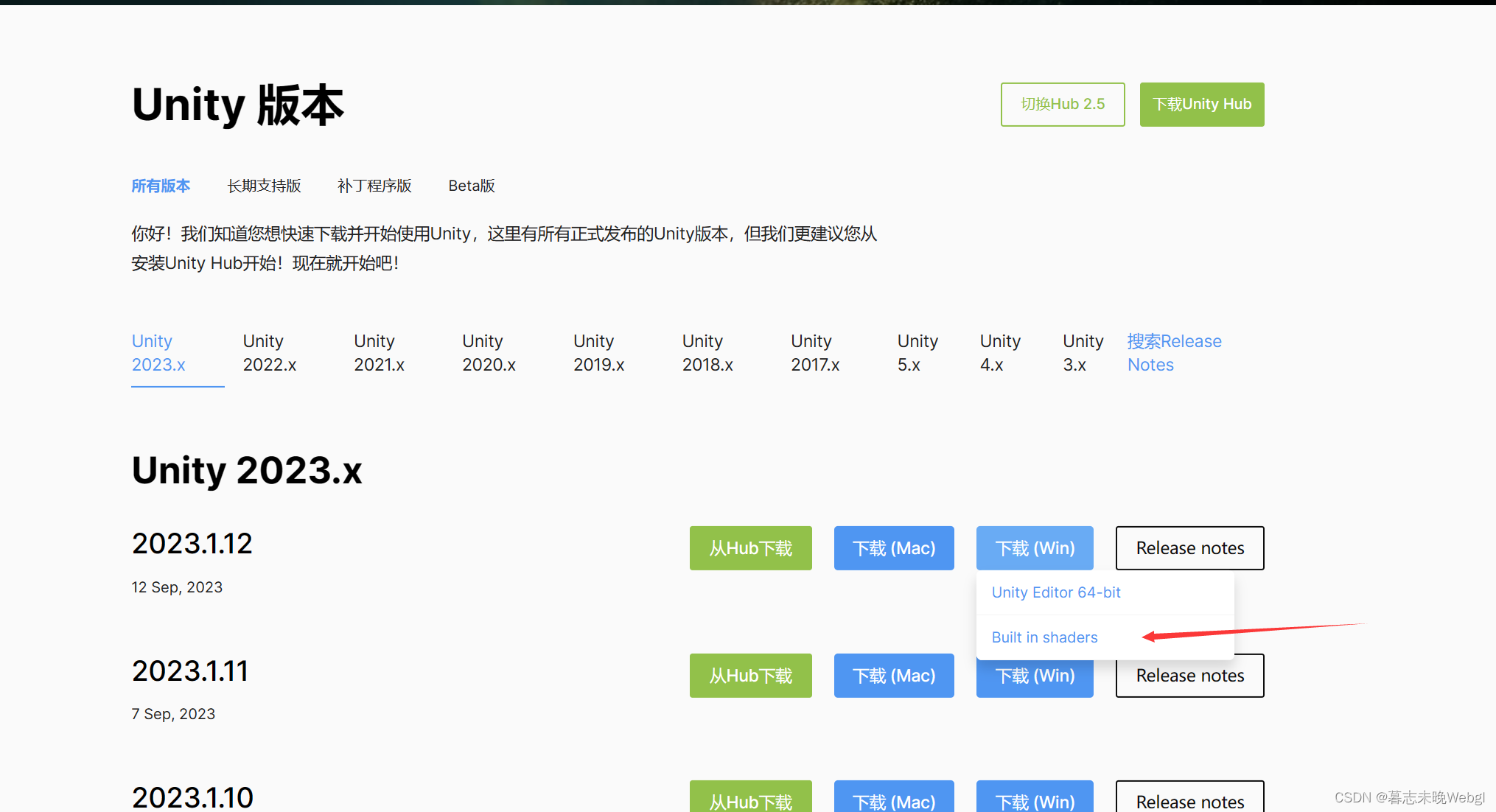
在引擎下载那里,会有一个Built in Shaders,下载

打开以后,就是对应的shader

内置的shandard在DefaultResourcesExtra目录内,打开便是。
shader解析
Standard里面分了两套,一套正常的,一套精简版的,
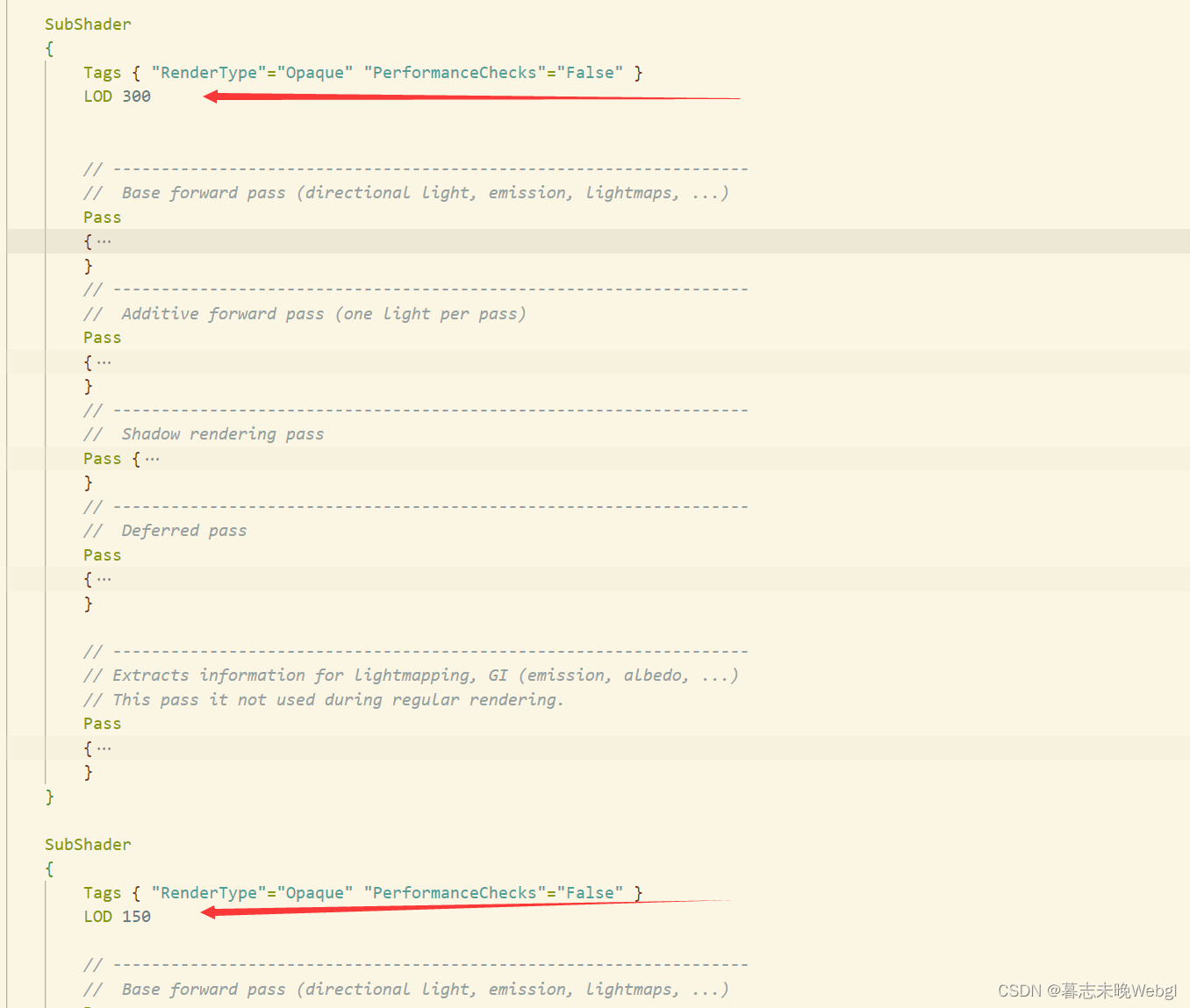
这两套渲染的切换是通过设置shader的lod进行切换的。
每个shader下面由5个pass组成(简化版的不支持延迟渲染)
- 前向渲染主光源
- 前向渲染副光源
- 阴影渲染
- 延迟渲染
- 烘焙
简化版本的渲染也不支持视差偏移,它们是通过宏去控制的,更多不同在渲染代码内部。
ForwardBase 和ForwardAdd引用的一套渲染逻辑,然后通过定义的宏和调用不同的顶点/片元着色器函数来区分到底是base还是add。
base的是这样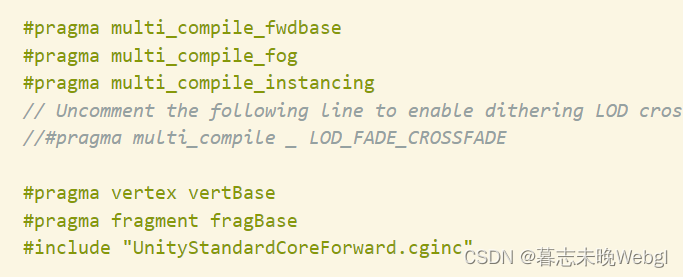
add是这样
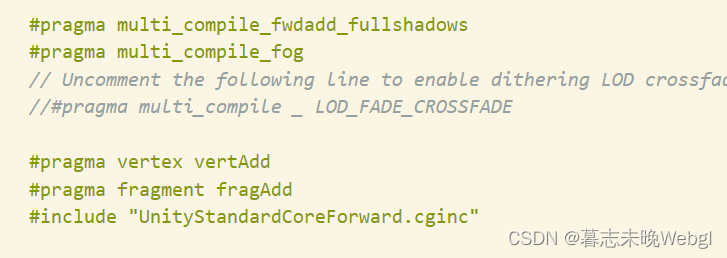
它们都引用的UnityStandardCoreForward渲染逻辑

在这个文件里面,是一些主要函数的定义,区分是否为简化的shader,如果简化的shader,则引入简化的库文件,非简化,则引入了UnityStandardCore.cginc,在这里定义了pass里面调用的顶点着色器和片元着色器函数,函数内直接调用了对应的UnityStandardCore库里的函数,这里也是standard的核心代码。
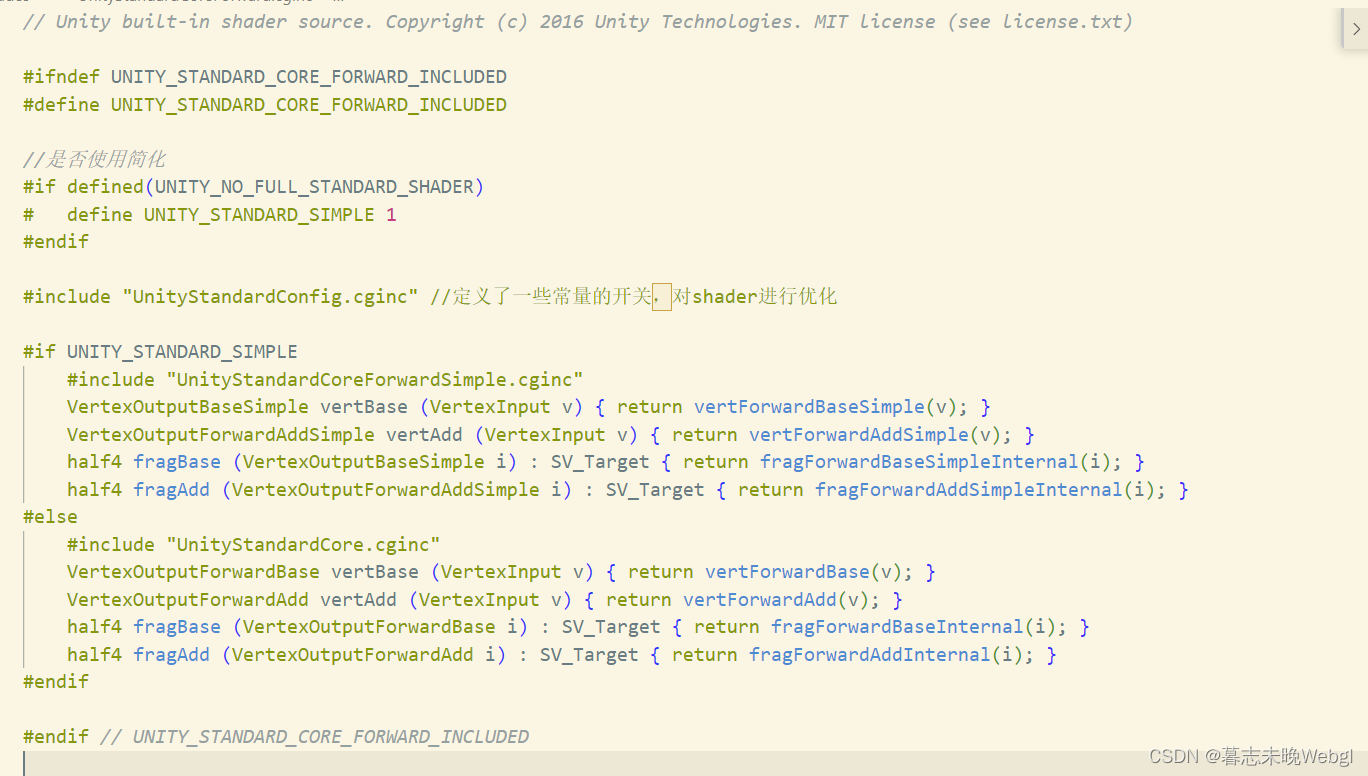
上面还引入了UnityStandardConfig.cginc,这个文件则是一些配置,主要定义的宏,抽几个比较重要的
下面定义了立体图贴图的曝光度以及lod层级数

定义brdf GGX
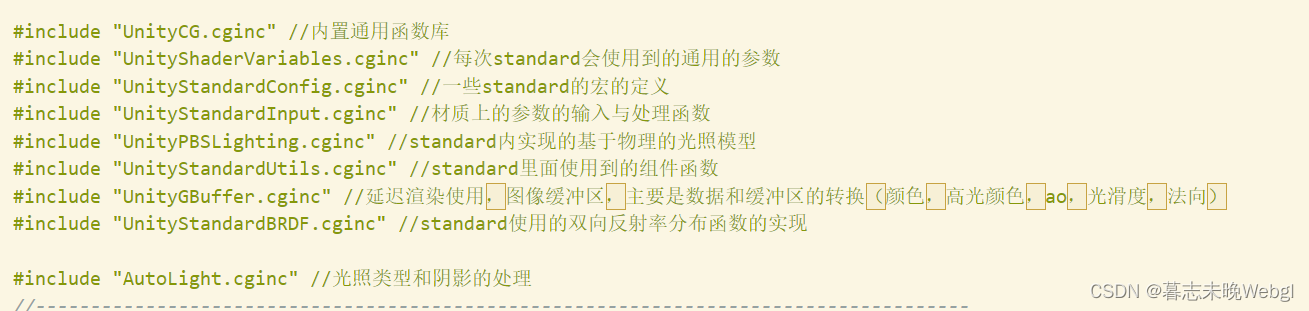
UnityStandardCore.cginc
里面代码的一些库的引用,核心库也是基于这些库实现的最终渲染
ForwardBase渲染主要就是调用了
VertexOutputForwardBase vertBase (VertexInput v) { return vertForwardBase(v); }
half4 fragBase (VertexOutputForwardBase i) : SV_Target { return fragForwardBaseInternal(i); }
VertexInput 就是在UnityStandardInput.cginc内实现的需要传入到顶点着色器的数据
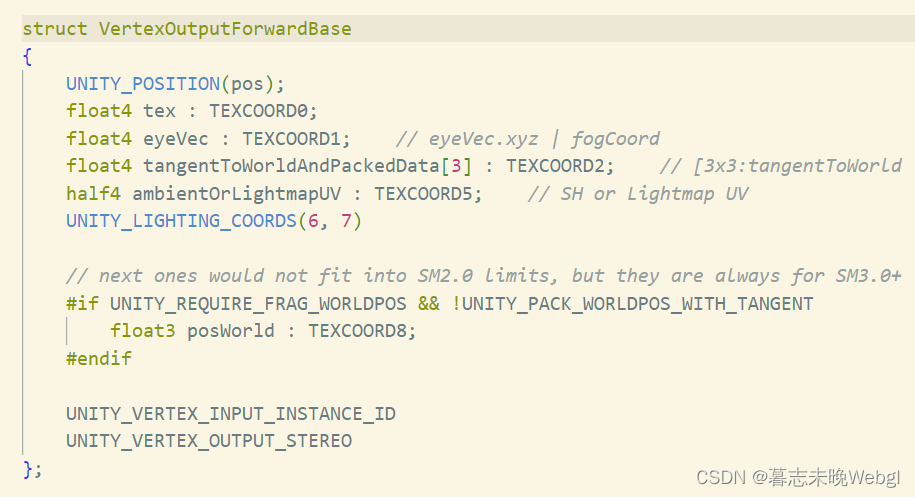
VertexOutputForwardBase 则是从顶点传入到片元的数据
vertForwardBase 函数里对位置,UV,法向等做了一些处理,更复杂的还有lightmap的UV,还有视差偏移

重点函数,片元着色器fragForwardBaseInternal,有点代码越少越狠的节奏,后面我将一个个的函数解析
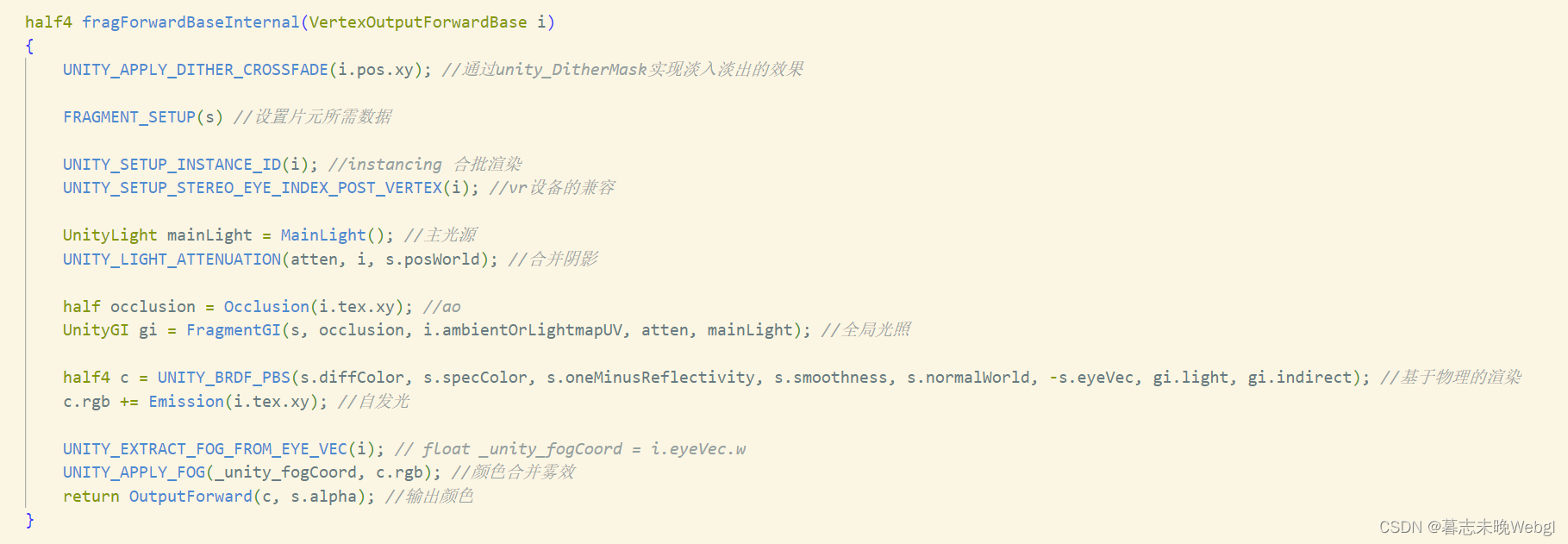
UNITY_APPLY_DITHER_CROSSFADE(i.pos.xy)
这个是为了实现淡入淡出的效果
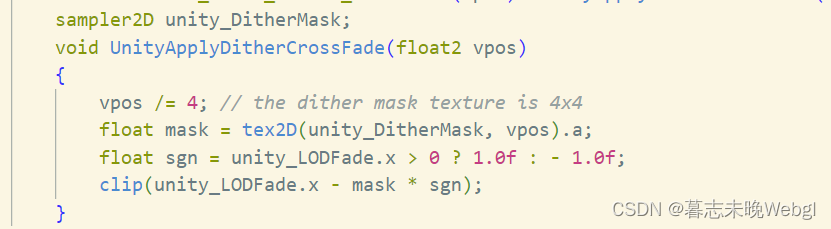
unity_DitherMask 为unity内置生成的抖动noise贴图
unity_LODFade 为需要设置的变量,在UnityShaderVariables.cginc里面定义
float4 unity_LODFade; // x is the fade value ranging within [0,1]. y is x quantized into 16 levels
FRAGMENT_SETUP(s)
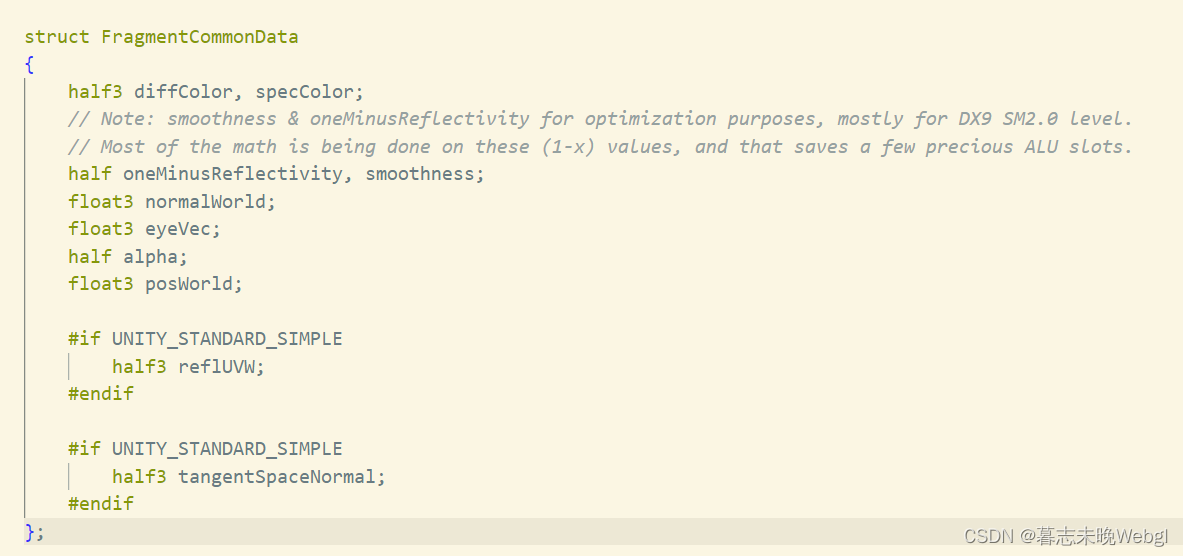
这个函数主要是生成后续使用的数据FragmentCommonData,定义为FragmentSetup函数
#define FRAGMENT_SETUP(x) FragmentCommonData x = FragmentSetup(i.tex, i.eyeVec.xyz, IN_VIEWDIR4PARALLAX(i), i.tangentToWorldAndPackedData, IN_WORLDPOS(i));
i.tex 顶点着色器计算的uv
i.eyeVec.xyz 摄像机朝向
IN_VIEWDIR4PARALLAX(i) 摄像机朝向基于视差偏移的法向值
i.tangentToWorldAndPackedData 切线坐标系转世界坐标系矩阵 [3x3:tangentToWorld | 1x3:viewDirForParallax or worldPos]
IN_WORLDPOS(i) 渲染目标世界坐标位置
FragmentCommonData 则是返回从顶点着色器拿到的数据处理后的数据,后续获取通过s变量获取。oneMinusReflectivity 为1-反射率
然后就是函数FragmentSetup,设置数据,截图里面我也加了注释
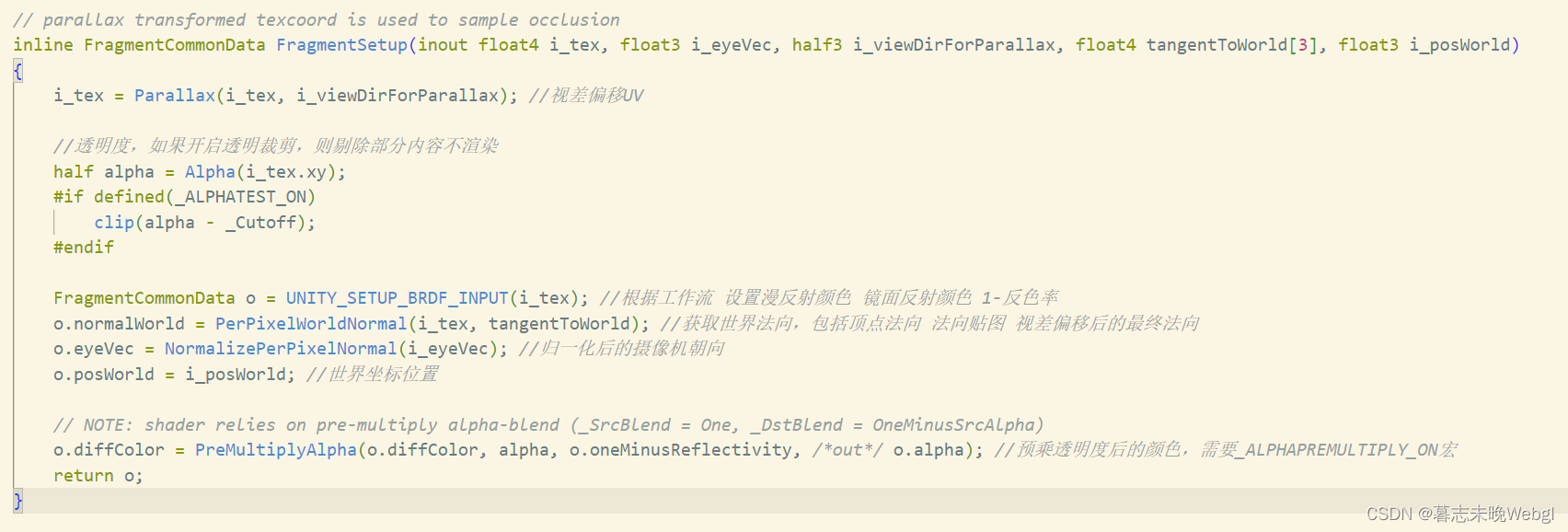
这里主要讲的是UNITY_SETUP_BRDF_INPUT函数,它可以根据工作流去设置数据,有三种 SpecularSetup RoughnessSetup MetallicSetup分别对应 高光工作流 粗糙度工作里 金属度工作流,standard.shader里面定义了金属度工作流

如果没有定义的话,会切换高光工作流

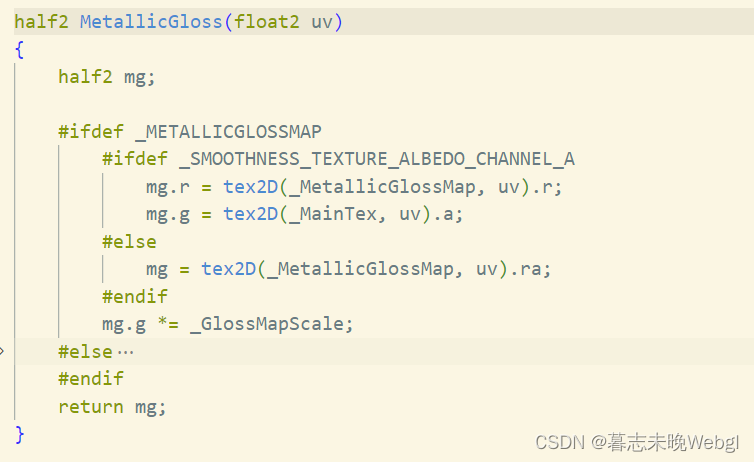
由于我这里使用的是金属度工作流,这里讲解一些金属度工作流的相关内容,MetallicSetup函数,函数内有两个函数,第一个函数去获取贴图的值,第二个函数为计算漫反射颜色,镜面反射颜色和反射率
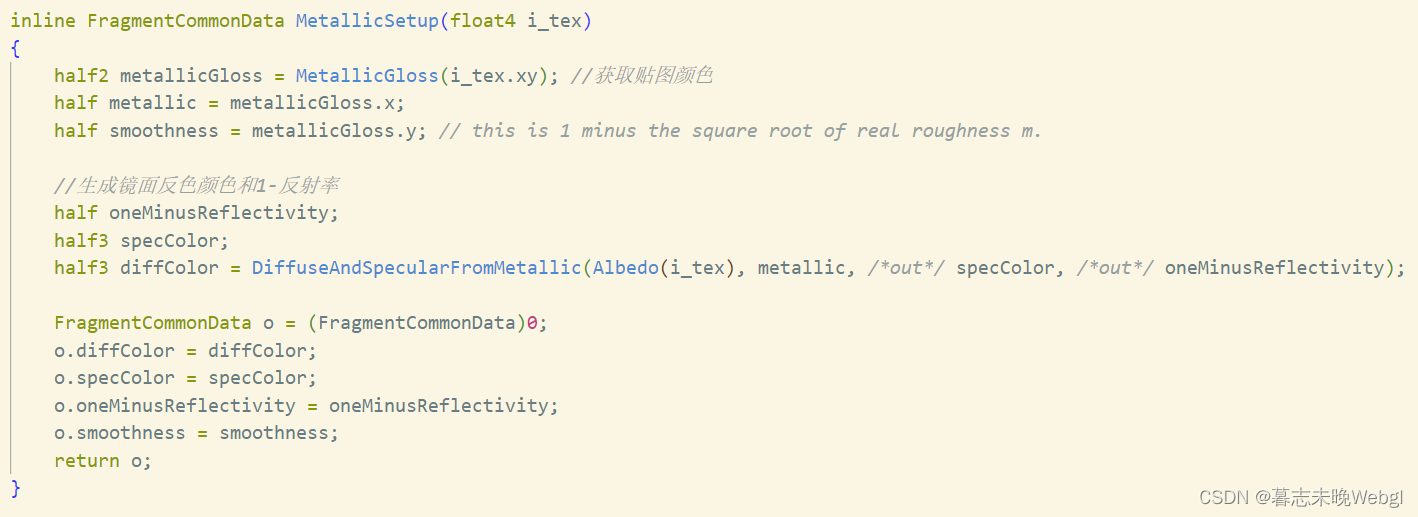
MetallicGloss内返回二维向量,x为金属度,y为光滑度,光滑度还可以选择是使用的_MetallicGlossMap的a通道还是_MainTex的a通道
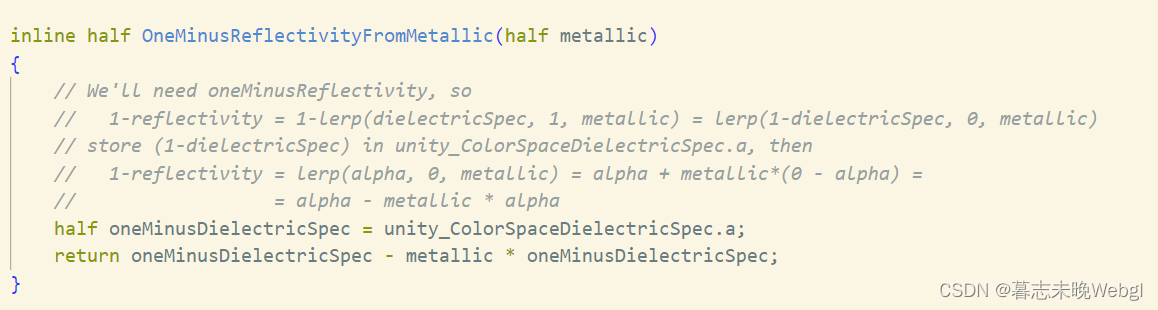
DiffuseAndSpecularFromMetallic
unity_ColorSpaceDielectricSpec的值在线性空间中默认是 half4(0.04, 0.04, 0.04, 1.0 - 0.04),这也是物理渲染中默认反射率

根据金属度求出反射率
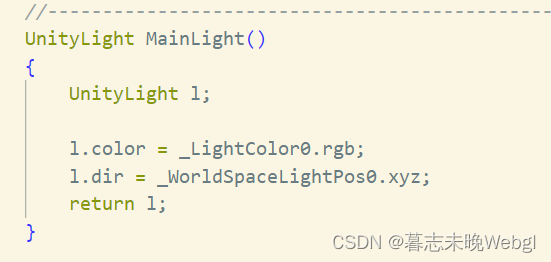
MainLight
UnityLight mainLight = MainLight(); //主光源
UNITY_LIGHT_ATTENUATION(atten, i, s.posWorld); //合并阴影
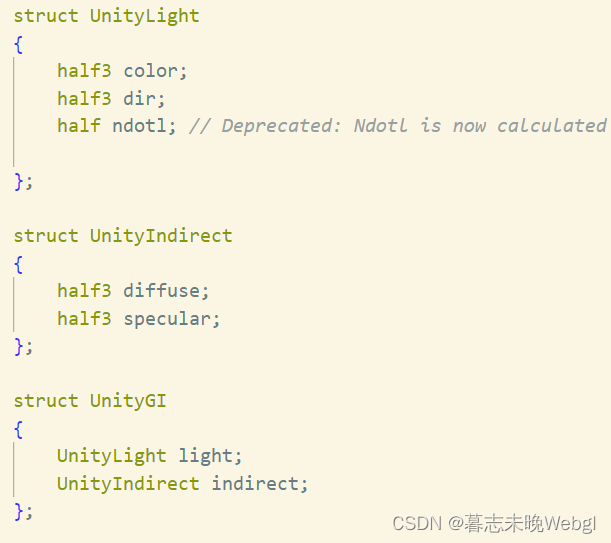
UnityLight 结构里面有三个值 color 光的颜色 dir 光的朝向 ndotl 法向和光的点乘值(已弃用),MainLight函数里面就是获取第一盏灯的颜色和朝向
UNITY_LIGHT_ATTENUATION 计算阴影遮挡。会根据光的类型调用不同的函数,一般主光源都是平衡光,这里看一下平衡光的实现,代码在AutoLight.cginc里面

在AutoLight.cginc中,对多种情况的处理,比如屏幕空间阴影,包含烘焙阴影
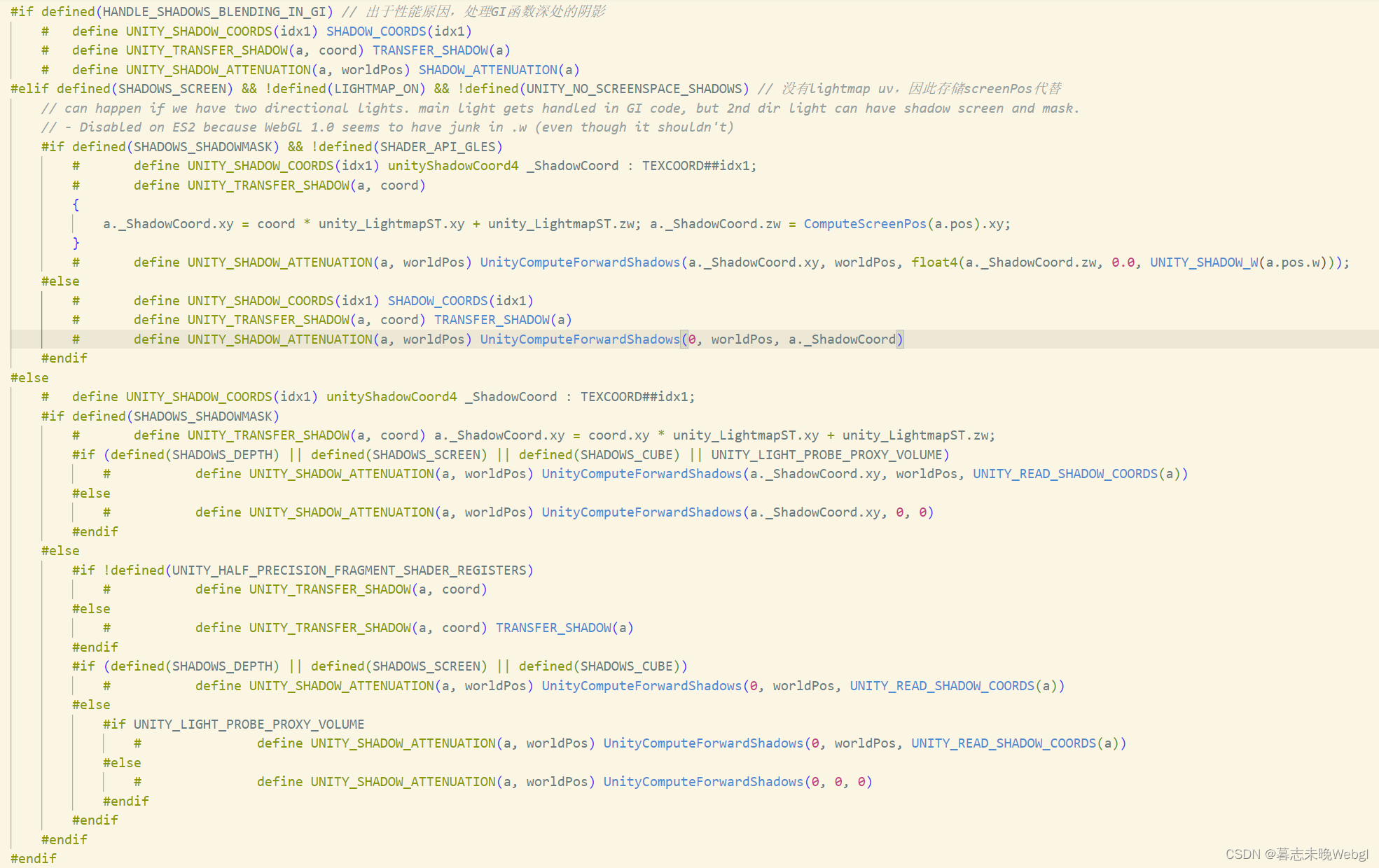
这里我们看最简单的使用SHADOW_ATTENUATION生成的unitySampleShadow函数,这个函数会去获取shadowmap的值来做处理
#define UNITY_SAMPLE_SCREEN_SHADOW(tex, uv) UNITY_SAMPLE_TEX2DARRAY(tex, float3((uv).x / (uv).w, (uv).y / (uv).w, (float)unity_StereoEyeIndex)).r

这一块解析起来确实麻烦,如果你需要阴影的话,记得直接使用UNITY_LIGHT_ATTENUATION函数。第一个值就是阴影的值。
FragmentGI
全局光照,包含了lightmap,sh球谐光照,ibl等对物体影响的内容
UnityGI gi = FragmentGI(s, occlusion, i.ambientOrLightmapUV, atten, mainLight); //全局光照
UnityGI包含全局光照有光的数据,以及间接光的漫反射和镜面反射颜色
FragmentGI 函数主要是设置一些所需要的值,然后调用UnityGlobalIllumination生成最终所需的UnityGI数据

UnityGlossyEnvironmentSetup 主要是求出了两个值 SmoothnessToPerceptualRoughness是通过光滑度求出粗糙度,也就是1-光滑度,reflUVW,根据眼睛和法向求出反射方向

准备好需要的全局光照计算数据以后,就要开始调用UnityGlobalIllumination计算了,分别去计算间接光漫反射,以及间接光镜面反射

在间接光漫反射里面,考虑光照贴图和动态光照贴图,这个我在之前我的文章里面说过,这里就不再多解释。
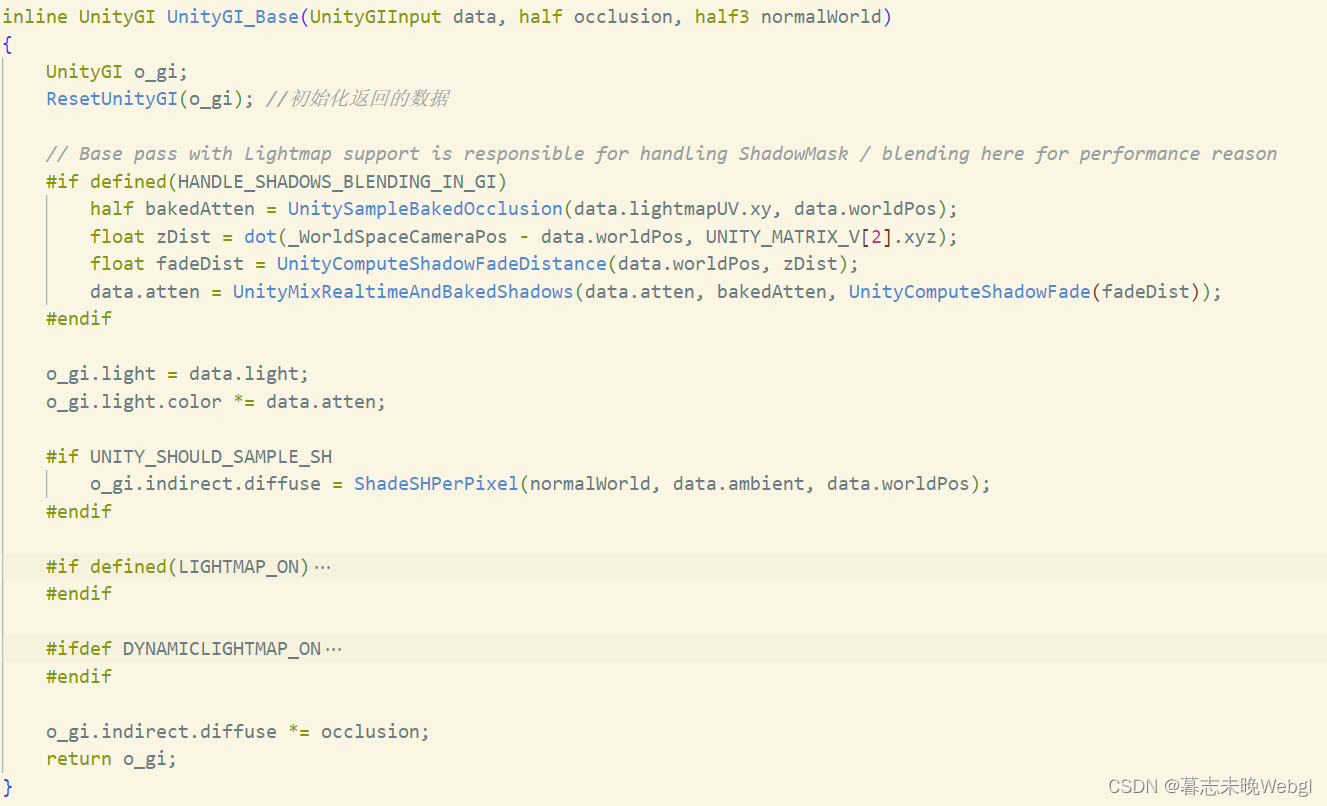
解析一下,上图比较重要的几行代码:
o_gi.light.color *= data.atten;
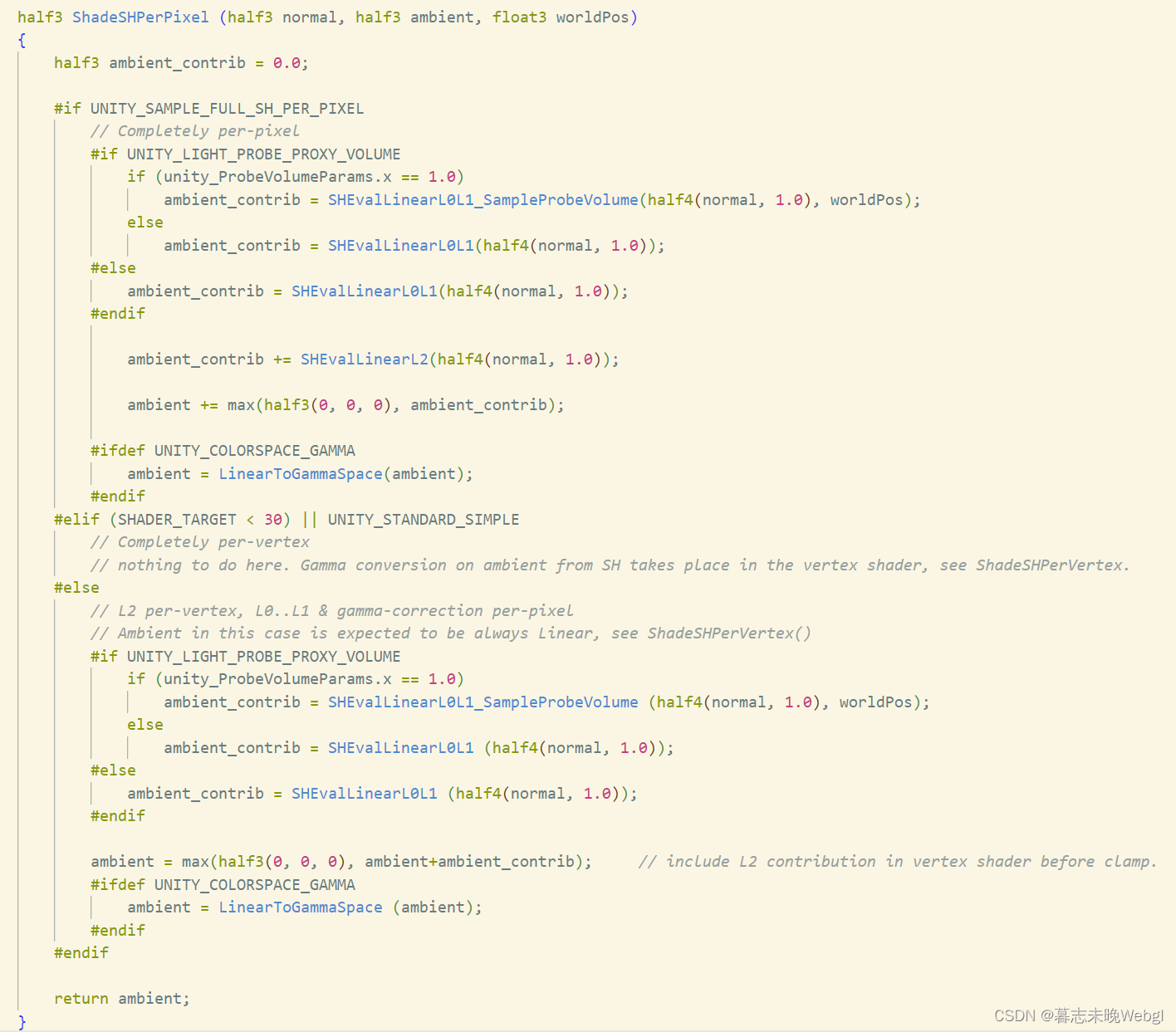
o_gi.indirect.diffuse = ShadeSHPerPixel(normalWorld, data.ambient, data.worldPos);
o_gi.indirect.diffuse *= occlusion;
ShadeSHPerPixel 计算间接光漫反射,相对于lightmap里面获取的,它具有动态性。球谐光照是由七个四维向量组成,
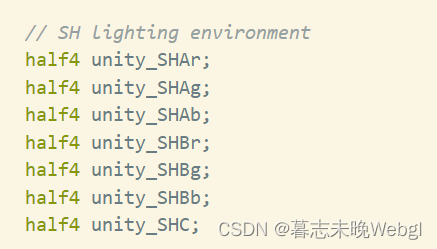
由引擎设置参数。unity还兼容的3d纹理方式的SHEvalLinearL0L1_SampleProbeVolume
计算完成间接光漫反射以后,就是计算间接光镜面反射,在unity里面是通过,实现原理就是通过立方体贴图去拾取颜色作为镜面反射的颜色
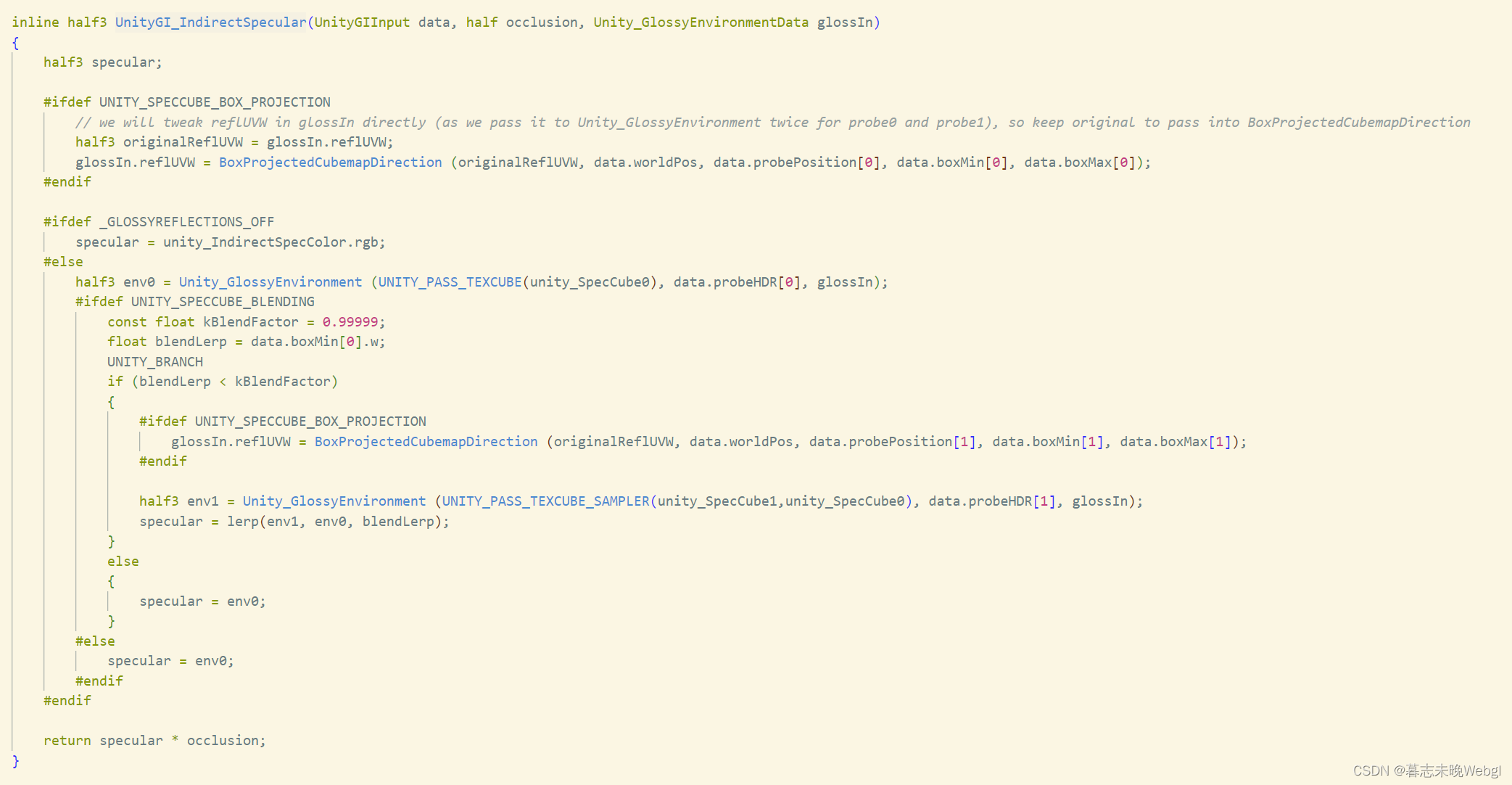
里面主要的方法就是Unity_GlossyEnvironment,这个去拾取引擎设置的立方体贴图,并获取颜色
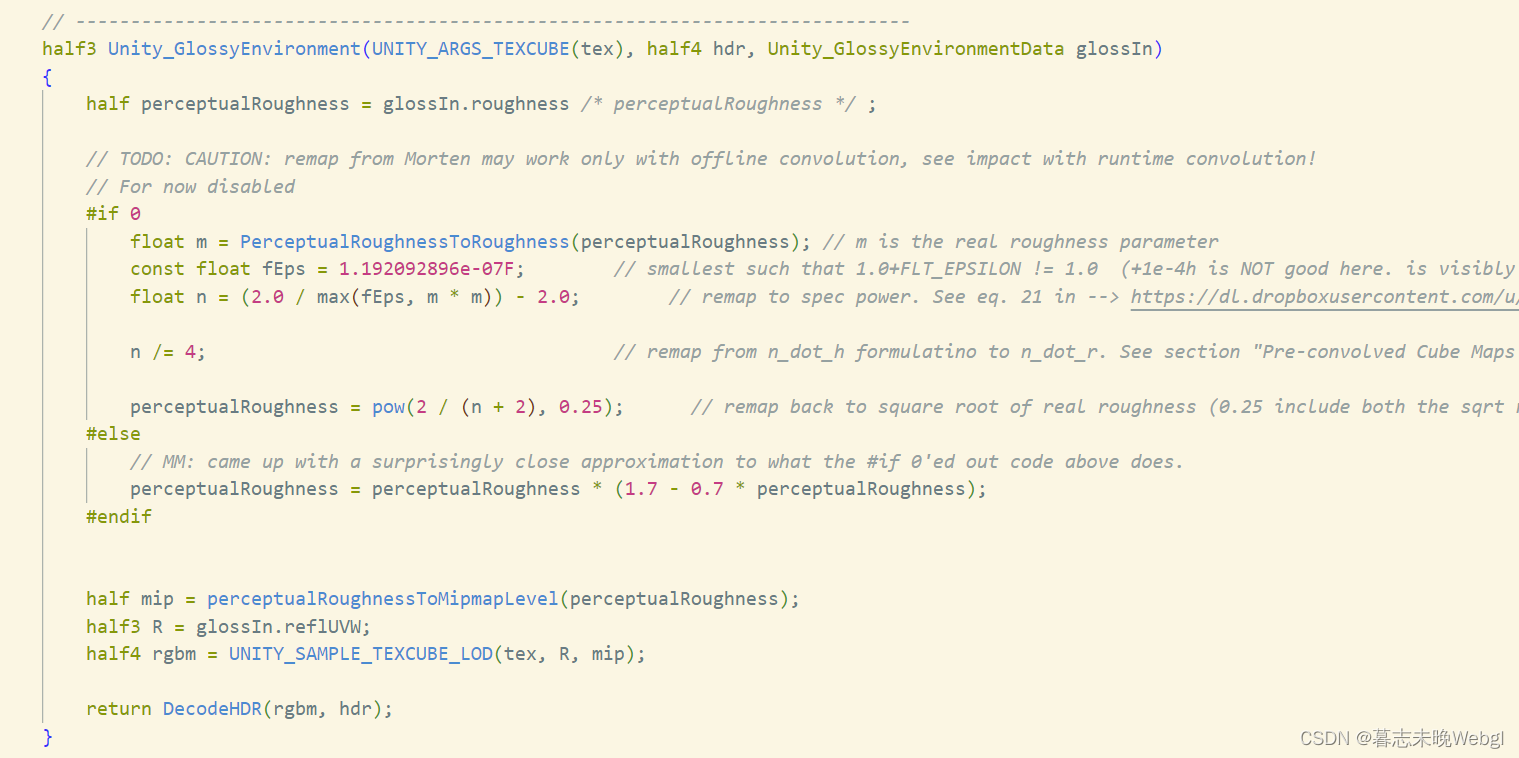
perceptualRoughnessToMipmapLevel就是粗糙度乘以LOD级数UNITY_SPECCUBE_LOD_STEPS,粗糙度越低,表示越光滑,那么lod层级就越低,图片拾取的也最清晰。

最后,将全局光的灯光颜色,间接光漫反射,间接光镜面反射计算完成,交给物理渲染BRDF函数实现最后的颜色。
UNITY_BRDF_PBS
half4 c = UNITY_BRDF_PBS(s.diffColor, s.specColor, s.oneMinusReflectivity, s.smoothness, s.normalWorld, -s.eyeVec, gi.light, gi.indirect); //基于物理的渲染
看代码,standard里面内置了三套方式,
- BRDF1_Unity_PBS 是基于物理的BRDF(Bidirectional Reflectance Distribution Function,双向反射分布函数)
- BRDF2_Unity_PBS 是基于极简的微表面理论的BRDF http://www.thetenthplanet.de/archives/255
- BRDF3_Unity_PBS 是不是微表面的基于修正归一化的 Blinn-Phong BRDF
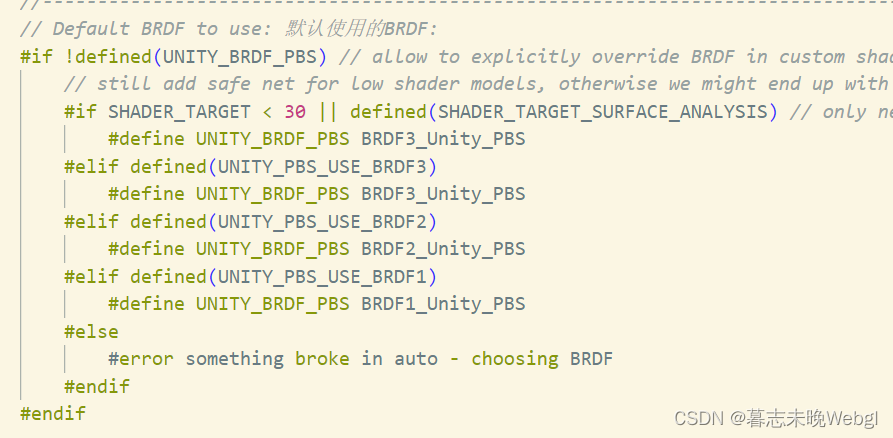
这里,我只介绍质量最好的第一种BRDF1_Unity_PBS,看注释,也能了解到它的模型是如何计算的
直接光漫反射 kD / pi
直接光镜面反射 kS * (D * V * F) / 4
最后乘以NdotL
BRDF里面还有两种,一种是GGX的高光,另一种是老旧的BlinnPhong的

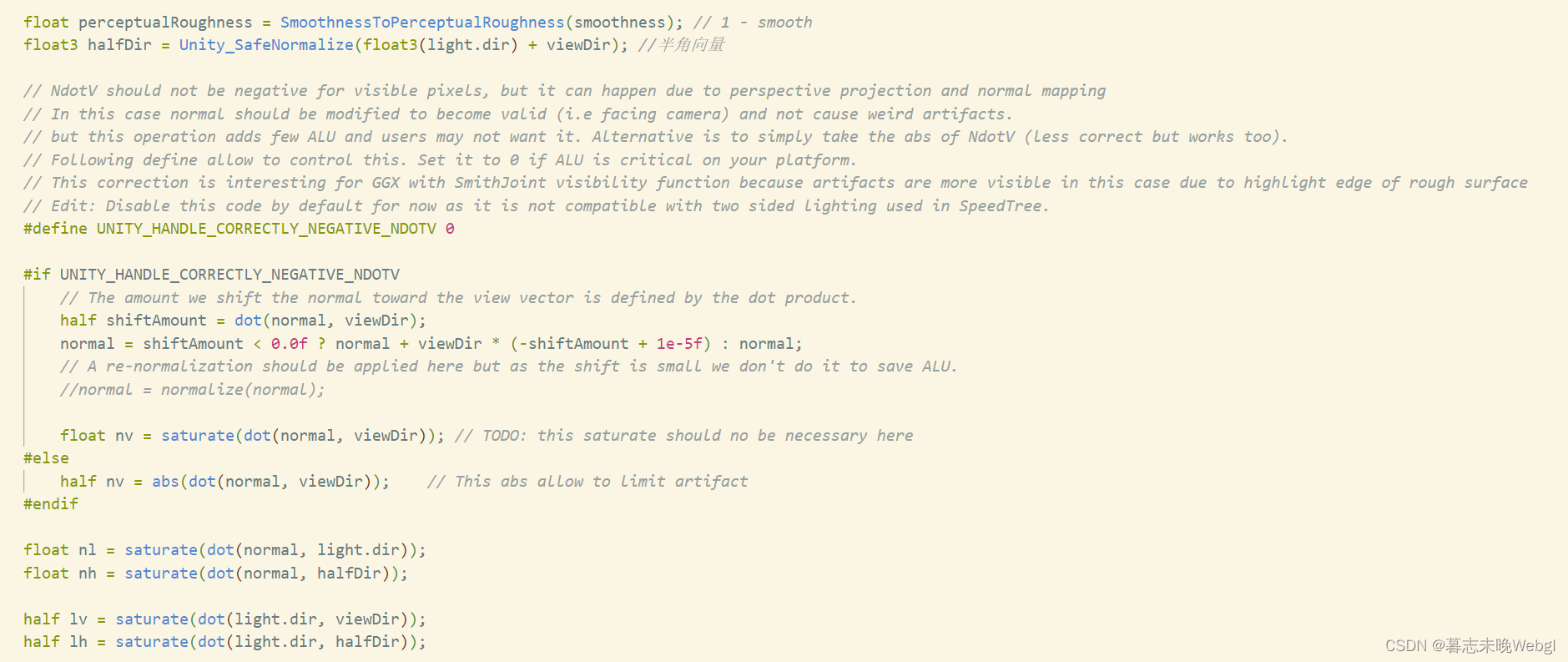
首先函数获取到需要用的数据,粗糙度,半角向量halfDir,NdotV,NdotL,NdotH,LdotV,LdotH
然后基于数据求直接光漫反射
// Diffuse term
half diffuseTerm = DisneyDiffuse(nv, nl, lh, perceptualRoughness) * nl;
求漫反射,还给注释迪士尼的漫反射必须除以PI,在函数外实现,貌似unity都亮了PI,所以不用除以PI了
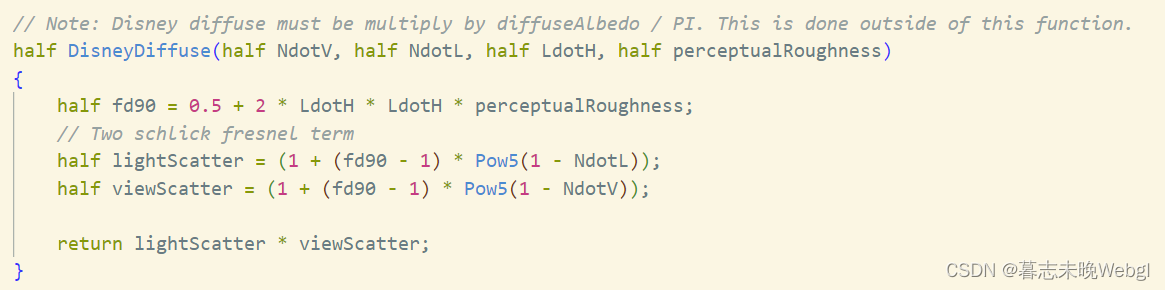
然后解释了一下为什么不除以PI

接下来,先求出BRDF的D项和V项
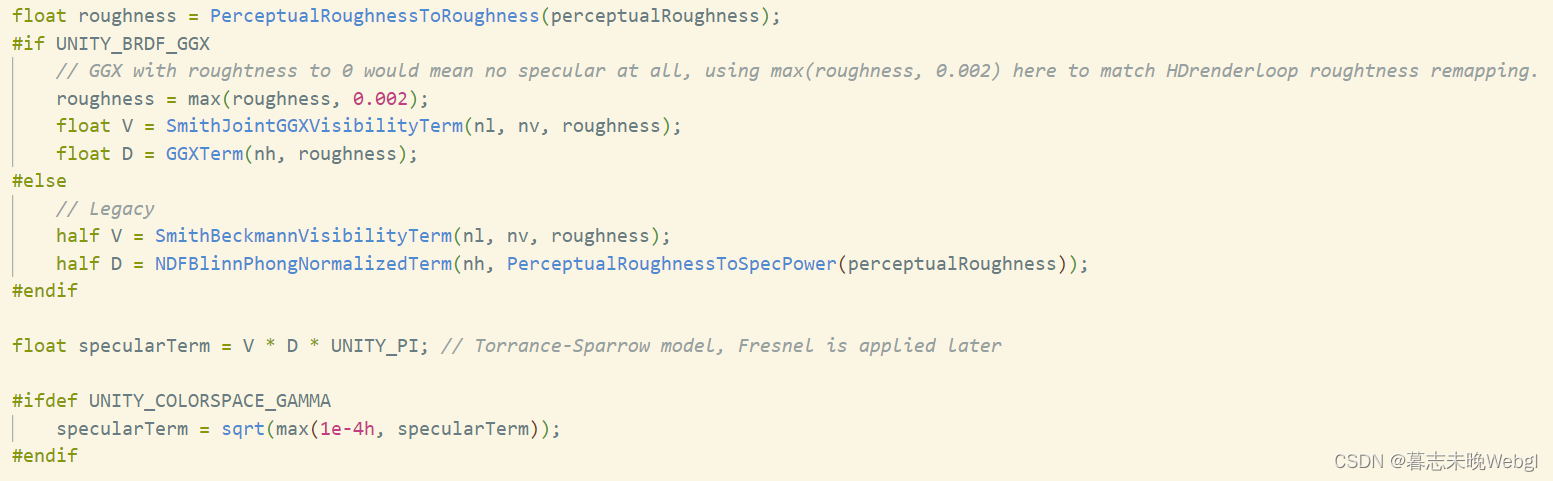
然后在最后颜色合并的时候,求出菲涅尔项 F,怪不得之前听朋友说,unity的BRDF写的很难看,确实难看

最终计算出来了颜色加上自发光合并雾效,返回片元颜色