本教程基于韦东山百问网出的 DShanMCU-RA6M5开发板 进行编写,需要的同学可以在这里获取: https://item.taobao.com/item.htm?id=728461040949
配套资料获取:https://renesas-docs.100ask.net
瑞萨MCU零基础入门系列教程汇总: https://blog.csdn.net/qq_35181236/article/details/132779862
第30章 IRDA红外遥控实验
本章目标
- 学会使用红外遥控IRDA的通信协议;
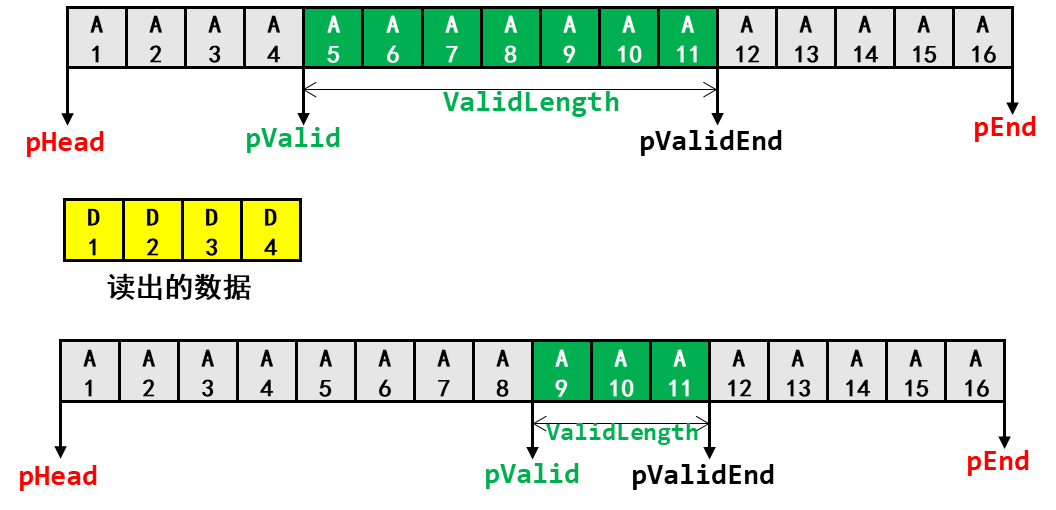
- 了解环形缓冲区的概念以及掌握基于环形缓冲区的程序设计;
- 学会使用瑞萨RA6M5的GPT输入捕获功能;
30.1 IRDA红外遥控协议简介
NEC协议是众多红外遥控协议的其中一种,除NEC外,还有RC5、RC6等协议。市面上买到的非学习型万能电视遥控器大多集成一种或多种编码,一般都支持NEC协议。
NEC编码的一帧(通常按一下遥控器按钮所发送的数据)由引导码、地址码及数据码组成,如下图所示,把地址码及数据码取反的作用是验证数据的正确性。
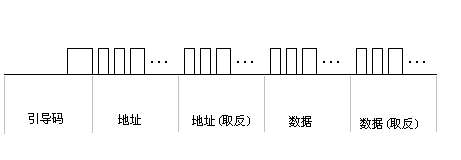
当一直按住一个按钮的时候,会隔110ms左右发一次连续码,连续码后面不带任何数据。NEC协议的信号定义如下图所示:

引导码由一个9ms的低脉冲加上一个4.5ms的高脉冲组成,它用来通知接收方“我要开始传输数据了”。
数据1和0,开始都是0.56ms的低脉冲,对于数据1,后面的高脉冲比较长;对于数据0,后面的高脉冲比较短。
NEC协议里有很多时间,这些时间有一个有趣的现象,把所有时间里面最小的0.56ms看作基本脉冲宽度,假设用t表示,那么其它时长都是t的倍数。
NEC协议中,信号的最小时间单位是0.56ms,这个时间对人来说是很短的,但对于嵌入式系统它是很长的,足够做很多事情了。我们并不知道用户什么时候按下遥控器,使用轮询的方式特别耗资源,因此使用中断来处理。
30.2 模块配置
30.2.1 硬件连接
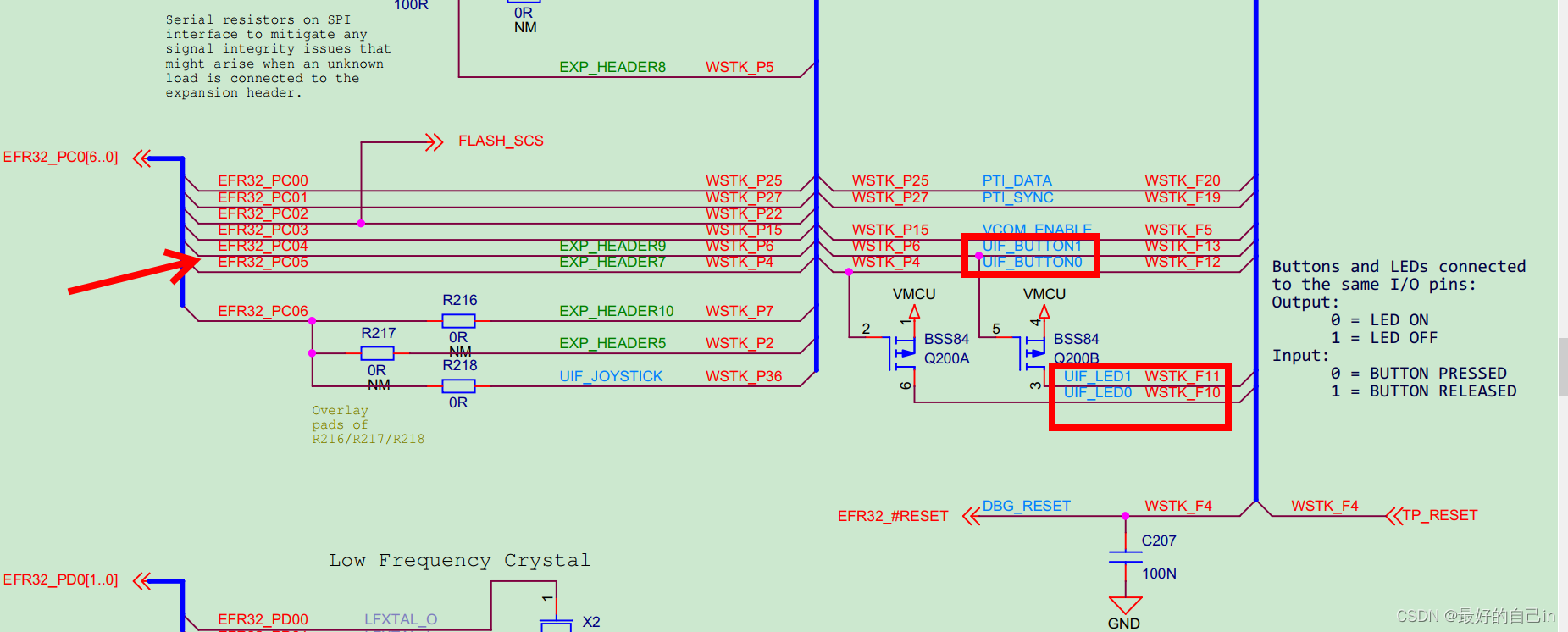
本次实验使用的是板载IRDA模块,其原理图如下图所示:

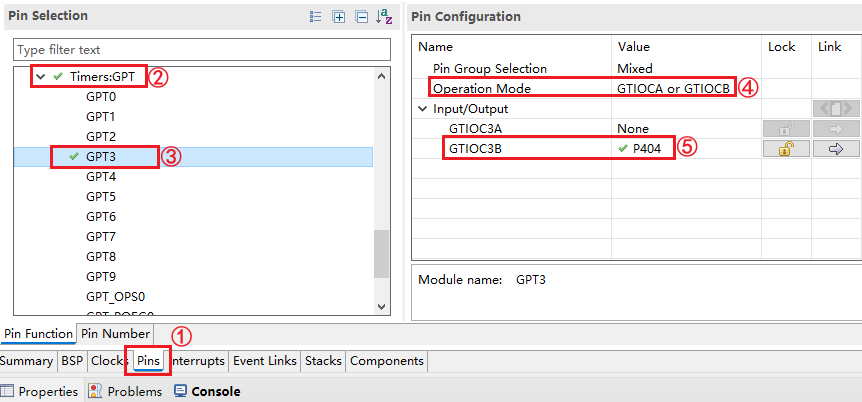
使用的引脚是P404,属于定时器GPT3的输入输出控制引脚。
30.2.2 GPT模块配置
在RASC中设置引脚和添加Stack模块,本小节就仅展示配置结果。
- 配置Pins
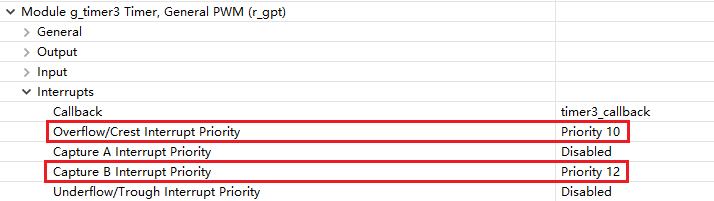
- 配置GPT Stack

30.3 设备对象封装
在实际开发过程中,会涉及很多不同的设备。本实验抛砖引玉,对于串口、定时器,都基于环形缓冲区来实现它们的操作。
30.3.1 串口设备
- 对象封装和管理
前面的章节里,使用串口时比较简单直接。本实验里,针对串口设备的特点,抽象出一个结构体(在dev_uart.h里):
typedef struct UartDev{
char *name;
unsigned char channel;
int (*Init)(struct UartDev *ptdev);
int (*Write)(struct UartDev *ptdev, unsigned char * const buf, unsigned int length);
int (*Read)(struct UartDev *ptdev, unsigned char *buf, unsigned int length);
struct UartDev *next;
}UartDev;
底层的程序里,对于每一个串口设备,都要实现一个UartDev结构体。
假设底层drv_uart.c里实现了一个UartDev结构体,要把它插入一个链表管理起来,在dev_uart.c里实现了如下链表插入函数:
static struct UartDev *gHeadUartDev;
void UartDeviceInsert(struct UartDev *ptdev)
{
if(NULL == gHeadUartDev)
gHeadUartDev = ptdev;
Else
{
ptdev->next = gHeadUartDev;
gHeadUartDev = ptdev;
}
}
- 实现串口设备
在drv_uart.c中,构造一个UartDev结构体,代码如下:
static struct UartDev gLogDevice = {
.name = "Log",
.channel = 7,
.Init = UARTDrvInit,
.Read = UARTDrvRead,
.Write = UARTDrvWrite,
.next = NULL
};
然后提供一个UartDevicesCreate函数,调用“UartDeviceInsert(&gLogDevice)”把这个设备插入链表:
void UartDevicesCreate(void)
{
UartDeviceInsert(&gLogDevice);
gLogDevice.Init(&gLogDevice);
}
- 注册串口设备
底层的drv_uart.c提供了UartDevicesCreate函数来注册它实现的UartDev,谁来调用UartDevicesCreate?
假设还有另一个底层的drv_uart2.c也提供了Uart2DevicesCreate函数来注册它实现的UartDev,谁来调用Uart2DevicesCreate?
我们需要在设备层实现一个函数:UartDevicesRegister,用来调用底层的接口函数,管理底层实现的所有UartDev。代码如下:
void UartDevicesRegister(void)
{
UartDevicesCreate();
UartDeviceList();
}
调用UartDevicesRegister后,在链表里就记录有底层实现的各个UartDev了。
- 查找串口设备
如何使用串口设备?需要在链表里根据名字找到UartDev,代码如下:
struct UartDev *UartDeviceFind(const char *name)
{
struct UartDev *ptdev = gHeadUartDev;
while(ptdev)
{
if(strstr(ptdev->name, name))
{
return ptdev;
}
ptdev = ptdev->next;
}
return NULL;
}
- 打印整个串口设备列表
链表打印也很简单,从表头开始遍历、打印:
void UartDeviceList(void)
{
struct UartDev *ptdev = gHeadUartDev;
printf("\r\nUart Device List:\r\n");
while(ptdev)
{
printf("\t%s\r\n", ptdev->name);
ptdev = ptdev->next;
}
printf("\r\n");
}
30.3.2 定时器设备
- 对象封装
根据定时器的特点抽象出一个结构体,里面有名称、通道等属性,还有初始化、启停、读取等操作方法。代码如下:
typedef struct TimerDev{
char *name;
unsigned char channel;
unsigned char status;
int (*Init)(struct TimerDev *ptdev);
int (*Start)(struct TimerDev *ptdev);
int (*Stop)(struct TimerDev *ptdev);
int (*Read)(struct TimerDev *ptdev, unsigned char *buf, unsigned int length);
int (*Timeout)(struct TimerDev *ptdev, unsigned int timeout);
struct TimerDev *next;
}TimerDevice;
- 实现定时器设备
本章要使用GPT3的输入捕获功能,因而在drv_gpt.c中实现了这个定时器:
static struct TimerDev gGPTDevice = {
.name = "GPT3",
.channel = 3,
.status = 0,
.Init = GPTDrvInit,
.Start = GPTDrvStart,
.Stop = GPTDrvStop,
.Read = GPTDrvRead,
.Timeout = NULL,
.next = NULL
};
void GPTTimerDevicesCreate(void)
{
TimerDeviceInsert(&gGPTDevice);
}
- 管理定时器设备
对于瑞萨的RA6M5处理器而言,定时器分为3大类:
- 滴答定时器
- GPT
- 看门狗定时器
根据config.h中的宏开关来决定是否注册这些设备:
void TimerDevicesRegister(void)
{
#if DRV_USE_SYSTICK
SystickTimerDevicesCreate();
#endif
#if DRV_USE_GPT
GPTTimerDevicesCreate();
#endif
#if DRV_USE_WDT
#endif
#if DRV_USE_IWDT
#endif
TimerDeviceList();
}
30.4 驱动程序
30.4.1 初始化定时器
本次实验会使用定时器:红外遥控器的输入引脚,触发定时器产生中断,在中断回调函数中记录时间。所以需要使能ECL模块来连接GPIO和GPT3,并且使能GPT3的触发功能。
另外,接收到的红外遥控信号是一系列的波形,读取到完整的波形后,才能解析出数据。所以需要为GPT3创建一个环形缓冲区,用来保存一系列的时间值。
初始化代码如下:
static struct RingBuffer *gGPT3Buffer = NULL;
static int GPTDrvInit(struct TimerDev *ptdev)
{
if(NULL==ptdev) return EINVAL;
switch(ptdev->channel)
{
case 0:case 1:case 2:
break;
case 3:
{
/* 打开GPT设备完成初始化 */
fsp_err_t err = g_timer3.p_api->open(g_timer3.p_ctrl, g_timer3.p_cfg);
assert(FSP_SUCCESS == err);
/* 使能GPT的ELC功能 */
err = g_timer3.p_api->enable(g_timer3.p_ctrl);
assert(FSP_SUCCESS == err);
/* 打开ELC设备完成初始化 */
err = g_elc.p_api->open(g_elc.p_ctrl, g_elc.p_cfg);
assert(FSP_SUCCESS == err);
/* 使能ELC的连接功能 */
err = g_elc.p_api->enable(g_elc.p_ctrl);
assert(FSP_SUCCESS == err);
/* 给GPT3申请一个缓冲区存储采样捕获数据 */
gGPT3Buffer = RingBufferNew(1024);
break;
}
case 4:case 5:case 6:
case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
第24行分配的缓冲区,只在这个驱动文件用到,用户并不关心GPT3的内部实现,所以gGPT3Buffer被设置为static类型,不要对外暴露它的存在。
30.4.2 定时器开启
调用GPT的start函数开启即可:
static int GPTDrvStart(struct TimerDev *ptdev)
{
if(NULL==ptdev) return -EINVAL;
switch(ptdev->channel)
{
case 0:case 1:case 2:
break;
case 3:
{
/* 开启GPT的计数 */
fsp_err_t err = g_timer3.p_api->start(g_timer3.p_ctrl);
assert(FSP_SUCCESS == err);
break;
}
case 4:case 5:case 6:
case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
}
30.4.3 定时器关闭
关闭定时器停止计数,顺便讲计数器清零、清除环形缓冲区:
static int GPTDrvStop(struct TimerDev *ptdev)
{
if(NULL==ptdev) return -EINVAL;
switch(ptdev->channel)
{
case 0:case 1:case 2:
break;
case 3:
{
/* 停止GPT的计数 */
fsp_err_t err = g_timer3.p_api->stop(g_timer3.p_ctrl);
assert(FSP_SUCCESS == err);
err = g_timer3.p_api->reset(g_timer3.p_ctrl);
assert(FSP_SUCCESS == err);
gOverflowCount = 0;
if(NULL != gGPT3Buffer)
gGPT3Buffer->Clear(gGPT3Buffer);
break;
}
case 4:case 5:case 6:
case 7:case 8:case 9:
break;
default:break;
}
return ESUCCESS;
30.4.4 中断回调函数
在定时器的回调函数里,有一个全局变量:gOverflowCount,它每隔10us累加一次。当发生GPIO捕获事件时,可以把gOverflowCount当做时间存入环形缓冲区。代码如下:
void timer3_callback(timer_callback_args_t * p_args)
{
switch(p_args->event)
{
case TIMER_EVENT_CYCLE_END:
{
gOverflowCount++;
break;
}
case TIMER_EVENT_CAPTURE_A:
case TIMER_EVENT_CAPTURE_B:
{
uint32_t lCaptureTime = gOverflowCount;
if(NULL != gGPT3Buffer)
gGPT3Buffer->Write(gGPT3Buffer, (uint8_t*)&lCaptureTime, sizeof(uint32_t));
break;
}
default:break;
}
}
30.4.5 读取定时器的采样数据
定时器的回调函数里,把信号的触发时间存入到唤醒缓冲区。要解析数据时,需要从环形缓冲区中读取数据。代码如下:
static int GPTDrvRead(struct TimerDev *ptdev, unsigned char *buf, unsigned int length)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == buf) return -EINVAL;
if(0 == length) return -EINVAL;
if(NULL == gGPT3Buffer) return -EINVAL;
unsigned int ret = gGPT3Buffer->Read(gGPT3Buffer, buf, length);
if(ret != length) return -ENOMEM;
return (int)length;
}
30.5 红外模块驱动
30.5.1 遥控器键值
红外遥控器上的所有按键的十六进制键值如下:
const unsigned char KeyCode[20] = {0x45, 0x47, 0x44, 0x40, 0x43, 0x07, 0x15, 0x09, 0x16, 0x19, 0x0D, 0x0C, 0x18, 0x5E, 0x08, 0x1C, 0x5A, 0x42, 0x52, 0x4A};
为了方便理解,针对这些键值定义了一个字符串指针数组:
const unsigned char *KeyName[20] = {"Open", "Menu", "Test", "+", "Return", "Back", "Suspend", "Forward", "0", "-", "Cancle", "1", "2", "3", "4", "5", "6", "7", "8", "9"};
30.5.2 红外设备对象封装
对于红外模块而言,最重要的就是获取键值,也就是读取函数;另外也要对红外模块进行初始化,抽象出一个结构体:
typedef struct IRDADev{
char *name;
int (*Init)(struct IRDADev *ptdev);
int (*Read) (struct IRDADev *ptdev, unsigned char *key_code, char **key_name);
}IRDADevice;
然后在dev_irda.c中构造IRDADev,代码如下:
static struct IRDADev gIRDADev = {
.name = "nec",
.Init = IRDADevInit,
.Read = IRDADevRead
};
struct IRDADev *IRDADeviceGet(void)
{
return &gIRDADev;
}
30.5.3 数据解码
根据NEC协议,数据的解码总体分为3步:
- 查找引导码字段;
- 查找连发码/非连发码字段;
- 数据解析;
引导码是两个采样捕获数据的时间差在9ms左右,连发码的时间差是2.25ms左右,非连发码的在4.5ms左右,误差取为500us。
当收到一个引导码后,后续会传来32个位数据(表示地址和数据),那么定时器就需要采样64次,根据时间差分辨该位是1还是0。
综上所述,IRDA的解码程序如下设计:
static int IRDADevRead(struct IRDADev *ptdev, unsigned char *key_code, char *key_name)
{
if(NULL == ptdev) return -EINVAL;
if(NULL == pTimerDev) return -EINVAL;
uint16_t temp_buff[64] = {0};
uint8_t pQ = 0;
uint32_t tick[2] = {0};
uint8_t step = 0;
uint16_t duty = 0;
uint32_t value = 0;
uint8_t i = 0, cnt = 0;
ptdev->key = NULL;
while(1)
{
if(pTimerDev->Read(pTimerDev, (uint8_t*)&tick[pQ], sizeof(uint32_t)) != sizeof(uint32_t))
{
continue;
}
pQ++;
if(pQ==2)
{
duty = (uint16_t)(tick[1] - tick[0])*10;
tick[0] = tick[1];
pQ = 1;
}
switch(step)
{
case 0:
{
if( (duty>=8500) && (duty<=9500) ) // 引导码
{
step++;
}
break;
}
case 1:
{
if( (duty>=4000) && (duty<=5000) ) // 非连发码
{
i = 0;
cnt = 0;
step++;
}
else if( (duty>=2000) && (duty<=2500) ) // 连发码
{
step += 3;
}
else
{
step = 0;
}
break;
}
case 2:
{
temp_buff[i] = duty;
i++;
if(i==64) step++;
break;
}
case 3:
{
for(i=0;i<64;i+=2)
{
if( (temp_buff[i]>=450) && (temp_buff[i]<=650) )
{
if( (temp_buff[i+1]>=450) && (temp_buff[i+1]<=650) ) // 逻辑0
{
}
else if( (temp_buff[i+1]>=1000) && (temp_buff[i+1]<=2000) ) // 逻辑1
{
value = value + (1<<cnt);
}
cnt++;
}
}
step++;
break;
}
case 4:
{
step = 0;
pQ = 0;
uint8_t sys_code = (value>>16)&0xFF;
for(i=0; i<20; i++)
{
if(KeyCode[i] == sys_code)
{
*key_code = sys_code;
*key_name = (char*)KeyName[i];
return ESUCCESS;
}
}
return EIO;;
}
default:break;
}
}
}
成功解码后,返回按键码、按键名字。
30.6 测试程序
测试程序放在Applications文件夹中,IRDA的测试源文件为app_irda.c,在里面实现了一个设备测试函数,将所有用到的设备进行注册,初始化IRDA设备,并且读取键值打印出来,代码如下所示:
void IRDAAppTest(void)
{
UartDevicesRegister();
TimerDevicesRegister();
struct IRDADev *pIRDA = IRDADeviceGet();
if(NULL == pIRDA)
{
printf("Failed to get IRDA device!\r\n");
return;
}
pIRDA->Init(pIRDA);
while(1)
{
if(ESUCCESS == pIRDA->Read(pIRDA))
{
printf("%s\r\n", pIRDA->key);
}
}
}
30.7 测试结果
在hal_entry()函数中调用测试函数IRDAAppTest,将编译出来的二进制可执行文件烧录到板子上运行,打开串口助手,按下遥控器按键可以看到类似下面的信息: