文章目录
- 概述
- hmap
- hmap数据结构
- 初始化hmap
- 插入节点
- 扩展hmap空间
- resize函数
- 删除节点
- 遍历所有节点
- 辅助函数hmap_first
- 辅助函数hmap_next
- smap
- smap数据结构
- 插入节点
- 删除节点
- 查找节点
- 遍历所有节点
- shash
- shash数据结构
- 插入节点
- 删除节点
- 查找节点
- 遍历所有节点
概述
在OVS软件中,hmap提供了基础的哈希表存储结构,smap和shash基于hmap进行实现,其中smap支持存储字符串,而sshash则支持存储任意类型的数据。
hmap
OVS软件的hmap是基于分离链接法实现的,分离链接法使用链表解决散列冲突,其做法是散列值相同的元素都保存到一个链表中。当查询的时候,首先根据散列值找到元素所在的链表,然后遍历链表查找对应的元素。
hmap数据结构
struct hmap {
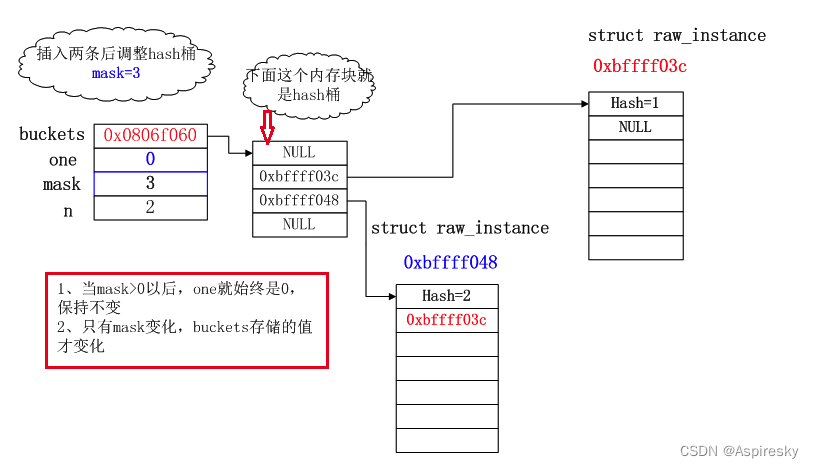
struct hmap_node **buckets; // 哈希数组,本质上是一个分离链表数组,当mask=0时,指向成员one的地址
struct hmap_node *one; // 仅在mask为0时使用
size_t mask; // 哈希桶的大小
size_t n; // 哈希表中存储的hmap_node节点数量
};
// 哈希节点
struct hmap_node {
size_t hash; // 哈希值
struct hmap_node *next; // 单向链表,所有哈希值相同的节点会链接到一个链表中
};
初始化hmap
void hmap_init(struct hmap *hmap)
{
hmap->buckets = &hmap->one;
hmap->one = NULL;
hmap->mask = 0;
hmap->n = 0;
}
插入节点
#define hmap_insert(HMAP, NODE, HASH) \
hmap_insert_at(HMAP, NODE, HASH, OVS_SOURCE_LOCATOR)
static inline void
hmap_insert_at(struct hmap *hmap, struct hmap_node *node, size_t hash,
const char *where)
{
hmap_insert_fast(hmap, node, hash); // 执行快速插入
if (hmap->n / 2 > hmap->mask) { // 当存储节点数量的一半大于mask时,需要对hmap进行扩容
hmap_expand_at(hmap, where);
}
}
static inline void
hmap_insert_fast(struct hmap *hmap, struct hmap_node *node, size_t hash)
{
struct hmap_node **bucket = &hmap->buckets[hash & hmap->mask]; // 计算hash值,并根据hash值确定数组索引
node->hash = hash;
node->next = *bucket;
*bucket = node; // 新节点插入到链表头部
hmap->n++; // 更新hmap存储节点数量
}
扩展hmap空间
void
hmap_expand_at(struct hmap *hmap, const char *where)
{
size_t new_mask = calc_mask(hmap->n); // 根据已存储节点的数量计算出新的mask值
if (new_mask > hmap->mask) {
COVERAGE_INC(hmap_expand);
resize(hmap, new_mask, where);
}
}
static size_t
calc_mask(size_t capacity)
{
size_t mask = capacity / 2;
mask |= mask >> 1;
mask |= mask >> 2;
mask |= mask >> 4;
mask |= mask >> 8;
mask |= mask >> 16;
#if SIZE_MAX > UINT32_MAX
mask |= mask >> 32;
#endif
mask |= (mask & 1) << 1;
return mask;
}
resize函数
static void
resize(struct hmap *hmap, size_t new_mask, const char *where)
{
struct hmap tmp;
size_t i;
ovs_assert(is_pow2(new_mask + 1));
hmap_init(&tmp); // 初始化临时的hmap
if (new_mask) {
tmp.buckets = xmalloc(sizeof *tmp.buckets * (new_mask + 1)); // 根据new_mask创建哈希数组
tmp.mask = new_mask;
for (i = 0; i <= tmp.mask; i++) {
tmp.buckets[i] = NULL;
}
}
int n_big_buckets = 0;
int biggest_count = 0;
int n_biggest_buckets = 0;
for (i = 0; i <= hmap->mask; i++) {
struct hmap_node *node, *next;
int count = 0;
for (node = hmap->buckets[i]; node; node = next) {
next = node->next;
hmap_insert_fast(&tmp, node, node->hash); // 将原hmap的元素插入到临时hmap中
count++;
}
}
hmap_swap(hmap, &tmp); // 交换两个hmap的结构,此时hmap的数据与原tmp是相同的
hmap_destroy(&tmp);
}
删除节点
static inline void
hmap_remove(struct hmap *hmap, struct hmap_node *node)
{
struct hmap_node **bucket = &hmap->buckets[node->hash & hmap->mask];
while (*bucket != node) {
bucket = &(*bucket)->next;
}
*bucket = node->next;
hmap->n--;
}
遍历所有节点
// 普通版本的遍历,不支持删除节点
#define HMAP_FOR_EACH(NODE, MEMBER, HMAP) \
HMAP_FOR_EACH_INIT(NODE, MEMBER, HMAP, (void) 0)
#define HMAP_FOR_EACH_INIT(NODE, MEMBER, HMAP, ...) \
for (INIT_CONTAINER(NODE, hmap_first(HMAP), MEMBER), __VA_ARGS__; \
(NODE != OBJECT_CONTAINING(NULL, NODE, MEMBER)) \
|| ((NODE = NULL), false); \
ASSIGN_CONTAINER(NODE, hmap_next(HMAP, &(NODE)->MEMBER), MEMBER))
// 安全版本的遍历,支持删除节点
#define HMAP_FOR_EACH_SAFE(NODE, NEXT, MEMBER, HMAP) \
HMAP_FOR_EACH_SAFE_INIT(NODE, NEXT, MEMBER, HMAP, (void) 0)
#define HMAP_FOR_EACH_SAFE_INIT(NODE, NEXT, MEMBER, HMAP, ...) \
for (INIT_CONTAINER(NODE, hmap_first(HMAP), MEMBER), __VA_ARGS__; \
((NODE != OBJECT_CONTAINING(NULL, NODE, MEMBER)) \
|| ((NODE = NULL), false) \
? INIT_CONTAINER(NEXT, hmap_next(HMAP, &(NODE)->MEMBER), MEMBER), 1 \
: 0); \
(NODE) = (NEXT))
辅助函数hmap_first
static inline struct hmap_node *
hmap_next__(const struct hmap *hmap, size_t start)
{
size_t i;
for (i = start; i <= hmap->mask; i++) {
struct hmap_node *node = hmap->buckets[i];
if (node) {
return node;
}
}
return NULL;
}
static inline struct hmap_node *
hmap_first(const struct hmap *hmap)
{
return hmap_next__(hmap, 0);
}
辅助函数hmap_next
static inline struct hmap_node *
hmap_next(const struct hmap *hmap, const struct hmap_node *node)
{
return (node->next
? node->next // 下一节点非空,返回下一节点
: hmap_next__(hmap, (node->hash & hmap->mask) + 1));
}
smap
smap基于hmap实现,是一个专用于存储key-value的哈希表,其中key和value类型都是字符串。
smap数据结构
struct smap {
struct hmap map;
};
struct smap_node {
struct hmap_node node;
char *key;
char *value;
};
插入节点
struct smap_node *
smap_add(struct smap *smap, const char *key, const char *value)
{
size_t key_len = strlen(key);
return smap_add__(smap, xmemdup0(key, key_len), xstrdup(value),
hash_bytes(key, key_len, 0)); // 为key和value申请内存空间
}
static struct smap_node *
smap_add__(struct smap *smap, char *key, void *value, size_t hash)
{
struct smap_node *node = xmalloc(sizeof *node);
node->key = key;
node->value = value;
hmap_insert(&smap->map, &node->node, hash); // 调用hmap接口插入节点
return node;
}
删除节点
void
smap_remove_node(struct smap *smap, struct smap_node *node)
{
hmap_remove(&smap->map, &node->node);
free(node->key);
free(node->value);
free(node);
}
void
smap_remove(struct smap *smap, const char *key)
{
struct smap_node *node = smap_get_node(smap, key);
if (node) {
smap_remove_node(smap, node);
}
}
查找节点
struct smap_node *
smap_get_node(const struct smap *smap, const char *key)
{
size_t key_len = strlen(key);
return smap_find__(smap, key, key_len, hash_bytes(key, key_len, 0));
}
static struct smap_node *
smap_find__(const struct smap *smap, const char *key, size_t key_len,
size_t hash)
{
struct smap_node *node;
HMAP_FOR_EACH_WITH_HASH (node, node, hash, &smap->map) {
if (!strncmp(node->key, key, key_len) && !node->key[key_len]) {
return node;
}
}
return NULL;
}
遍历所有节点
// 普通版本的遍历,不支持删除,调用hmap的接口
#define SMAP_FOR_EACH(SMAP_NODE, SMAP) \
HMAP_FOR_EACH_INIT (SMAP_NODE, node, &(SMAP)->map, \
BUILD_ASSERT_TYPE(SMAP_NODE, struct smap_node *), \
BUILD_ASSERT_TYPE(SMAP, struct smap *))
// 安全版本的遍历,支持删除,调用hmap的接口
#define SMAP_FOR_EACH_SAFE(SMAP_NODE, NEXT, SMAP) \
HMAP_FOR_EACH_SAFE_INIT ( \
SMAP_NODE, NEXT, node, &(SMAP)->map, \
BUILD_ASSERT_TYPE(SMAP_NODE, struct smap_node *), \
BUILD_ASSERT_TYPE(NEXT, struct smap_node *), \
BUILD_ASSERT_TYPE(SMAP, struct smap *))
shash
shash也是基于hmap进行扩展,支持存储任意类型的数据。
shash数据结构
struct shash_node {
struct hmap_node node;
char *name;
void *data;
};
struct shash {
struct hmap map;
};
插入节点
static struct shash_node *
shash_add_nocopy__(struct shash *sh, char *name, const void *data, size_t hash)
{
struct shash_node *node = xmalloc(sizeof *node);
node->name = name;
node->data = CONST_CAST(void *, data); // 去除const属性进行存储
hmap_insert(&sh->map, &node->node, hash);
return node;
}
struct shash_node *
shash_add_nocopy(struct shash *sh, char *name, const void *data)
{
return shash_add_nocopy__(sh, name, data, hash_name(name));
}
struct shash_node *
shash_add(struct shash *sh, const char *name, const void *data)
{
return shash_add_nocopy(sh, xstrdup(name), data); // 为key申请内存空间
}
删除节点
void
shash_delete(struct shash *sh, struct shash_node *node)
{
free(shash_steal(sh, node));
}
char *
shash_steal(struct shash *sh, struct shash_node *node)
{
char *name = node->name;
hmap_remove(&sh->map, &node->node);
free(node);
return name;
}
查找节点
static struct shash_node *
shash_find__(const struct shash *sh, const char *name, size_t name_len,
size_t hash)
{
struct shash_node *node;
HMAP_FOR_EACH_WITH_HASH (node, node, hash, &sh->map) {
if (!strncmp(node->name, name, name_len) && !node->name[name_len]) {
return node;
}
}
return NULL;
}
struct shash_node *
shash_find(const struct shash *sh, const char *name)
{
return shash_find__(sh, name, strlen(name), hash_name(name));
}
遍历所有节点
#define SHASH_FOR_EACH(SHASH_NODE, SHASH) \
HMAP_FOR_EACH_INIT (SHASH_NODE, node, &(SHASH)->map, \
BUILD_ASSERT_TYPE(SHASH_NODE, struct shash_node *), \
BUILD_ASSERT_TYPE(SHASH, struct shash *))
#define SHASH_FOR_EACH_SAFE(SHASH_NODE, NEXT, SHASH) \
HMAP_FOR_EACH_SAFE_INIT ( \
SHASH_NODE, NEXT, node, &(SHASH)->map, \
BUILD_ASSERT_TYPE(SHASH_NODE, struct shash_node *), \
BUILD_ASSERT_TYPE(NEXT, struct shash_node *), \
BUILD_ASSERT_TYPE(SHASH, struct shash *))