全部学习汇总: GreyZhang/g_TC275: happy hacking for TC275! (github.com)
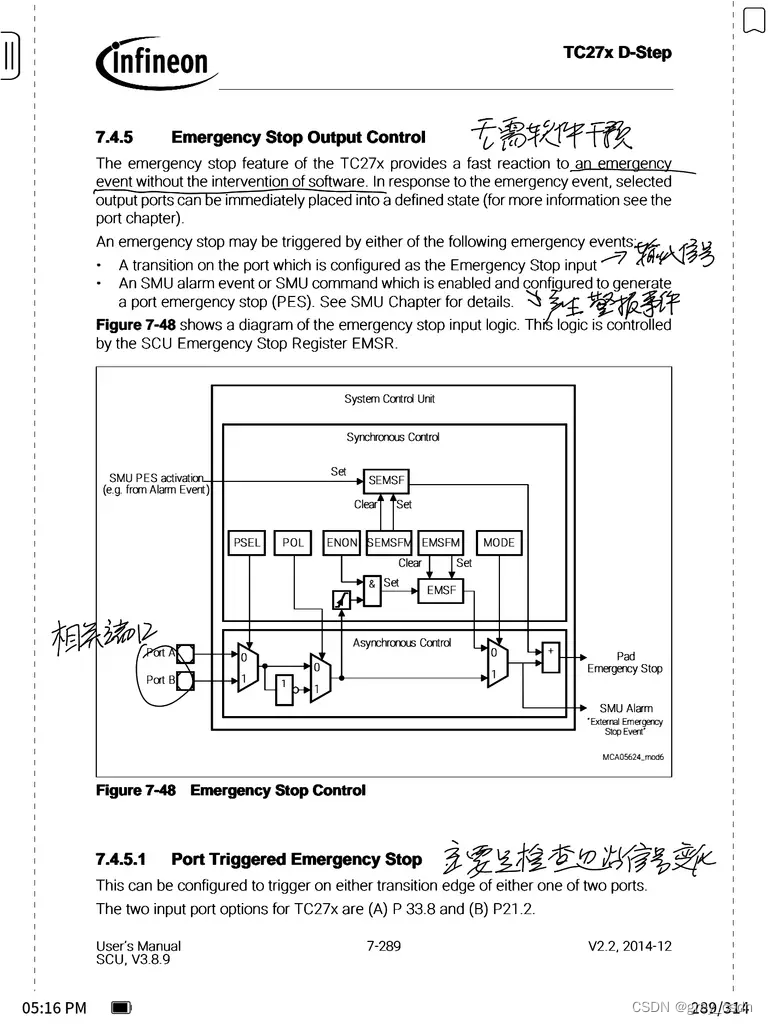
- 急停功能是不需要软件进行干预的,至少,这个事件的动作触发是不需要软件进行干预的。
- 急停事件的触发因素:外部的输入事件、SMU的警报信息。
- 外部的输入事件一般是通过Port A和Port B两个端口。
- 检查触发的方法一般是检查是否出现了边沿信号,这样的检查方式最近看到了好多。
- 急停控制逻辑有两种基本的运行模式:同步或者异步。
- 同步模式由硬件触发,软件停止。
- 异步模式由硬件触发,由硬件停止。
- 软件的停止方法是通过寄存器写入实现的,而硬件停止的方法室PORT A、PORT B中两个端口一个是用作触发输入,一个用作停止输入。
- 无论MSR采用的是同步模式还是异步模式,由SMU触发的事件导致的急停处理都是出于同步状态。由此看,其实同步以及异步约束的是一个故障的处理过程属性而不是整个系统的属性。
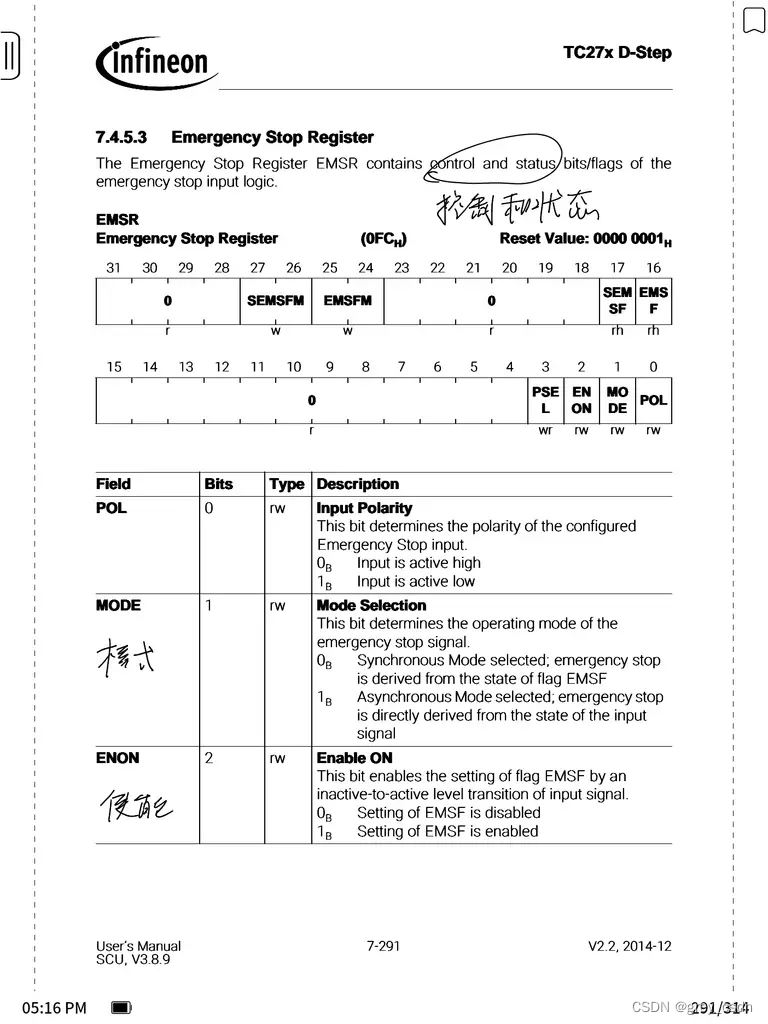
这里的这个寄存器是一个控制与状态合并的寄存器,有模式的选择以及使能等操作设置。而且都是即可以写又可以进行回读的。除此之外,还有一些其他的状态位可以用来提示一些状态信息。
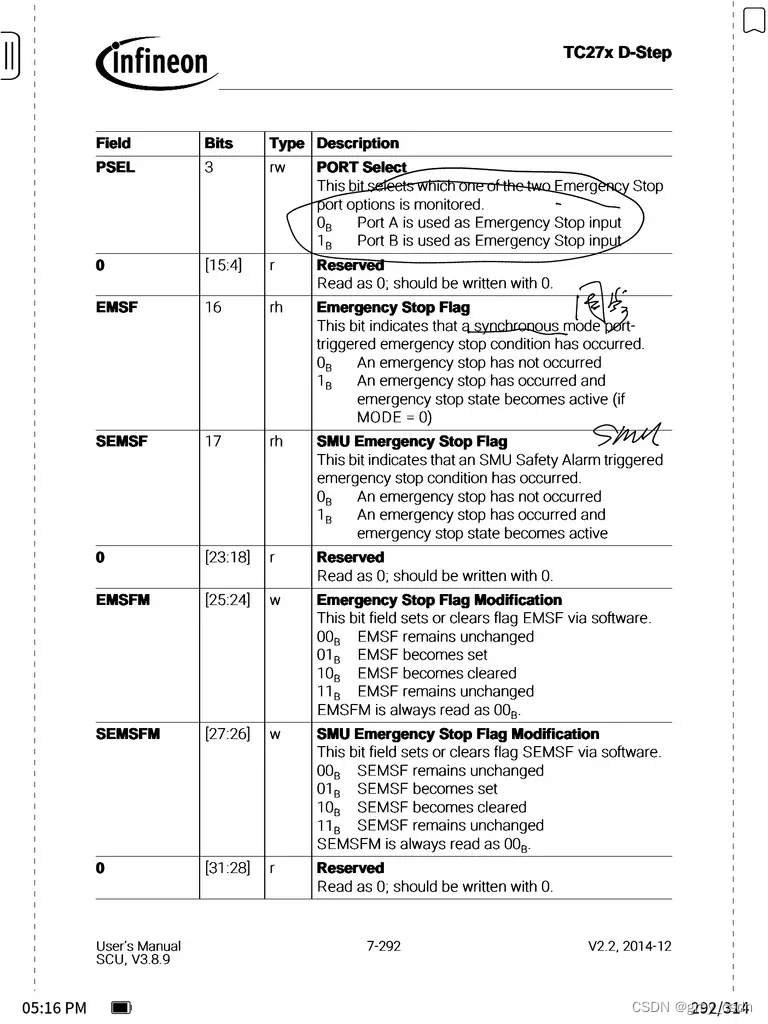
这里包含了一个端口设置信息还有一系列的状态信息,包括同步以及SMU等信息。
这个芯片支持LBIST,可以自动执行扫描检测检测芯片质量问题,结果存储到寄存器中。
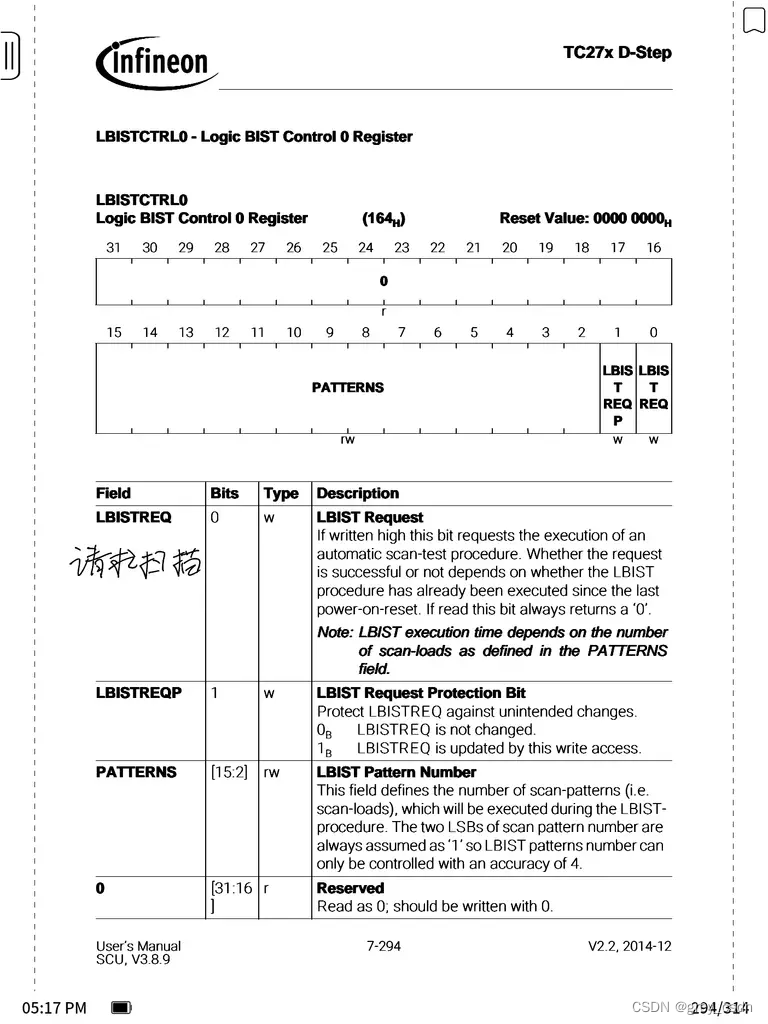
这个检测功能看上去需要的驱动设计很少,只是一个请求似乎就可以实现。后面,这个功能可以做一个测试。
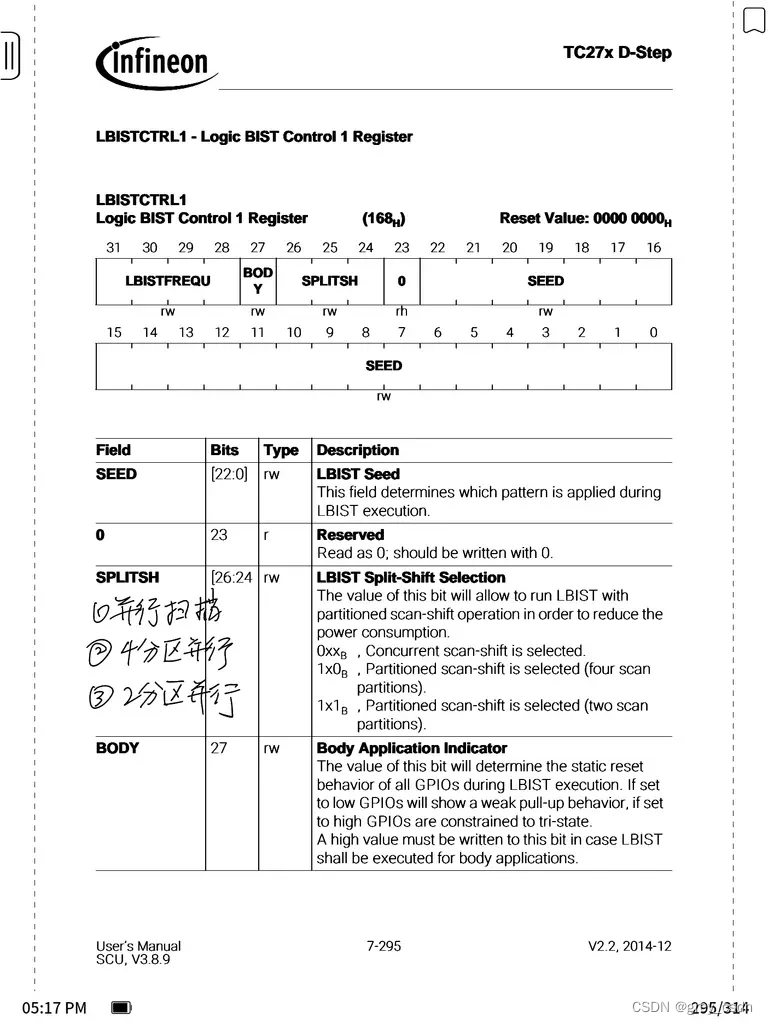
检查区域移动方式选择:并行扫描、4分区并行、2分区并行。
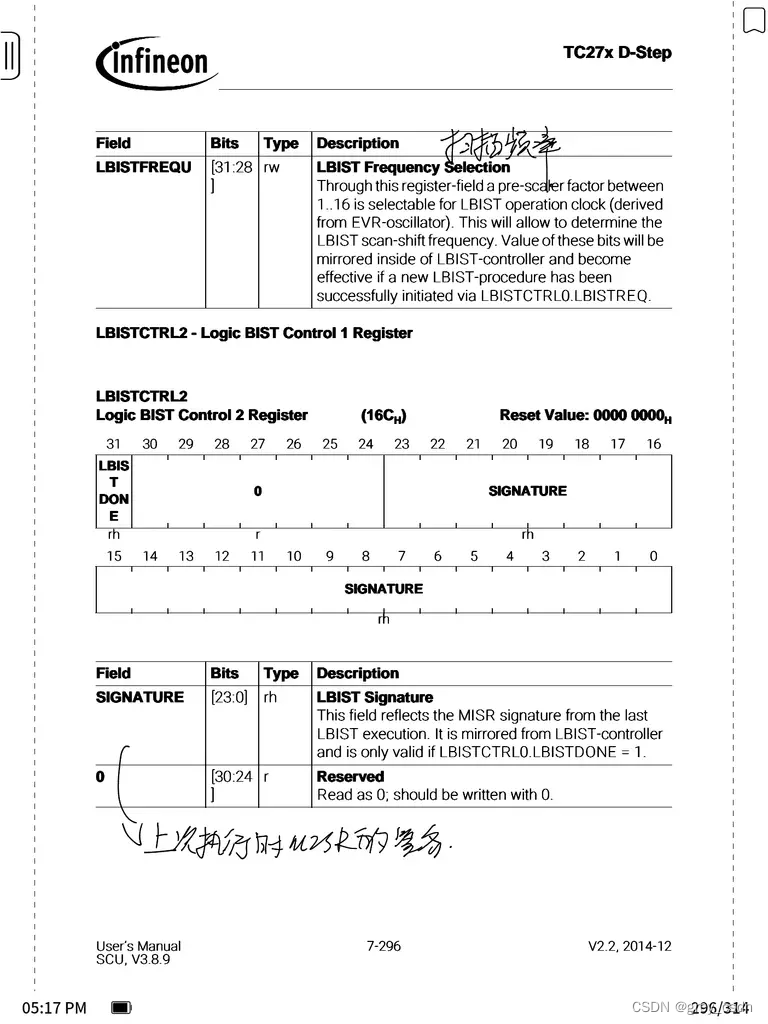
- 扫描频率是可以设置的。
- 后面的寄存器提供的是上一次执行的MISR任务签名信息。
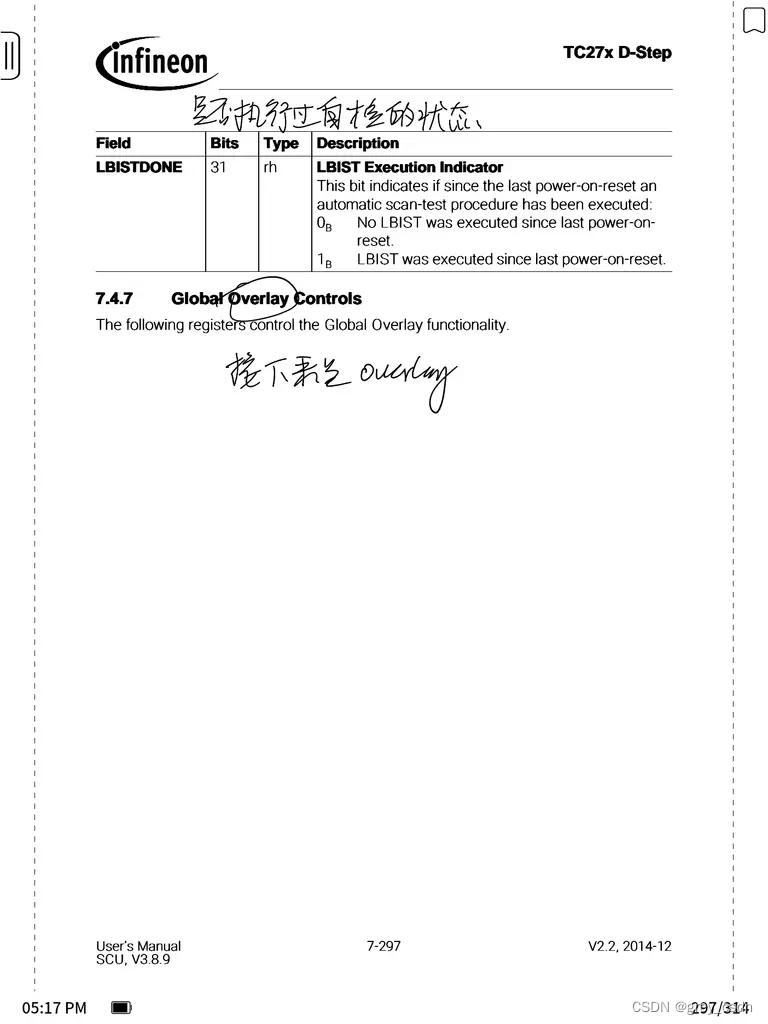
- 是否执行过自检状态有一个寄存器的标志位可以查看。
- 后面的信息是overlay的开篇了。

overlay的功能看上去很简单,一共涉及到2个寄存器:一个是控制使能,另一个是控制数据有效性。
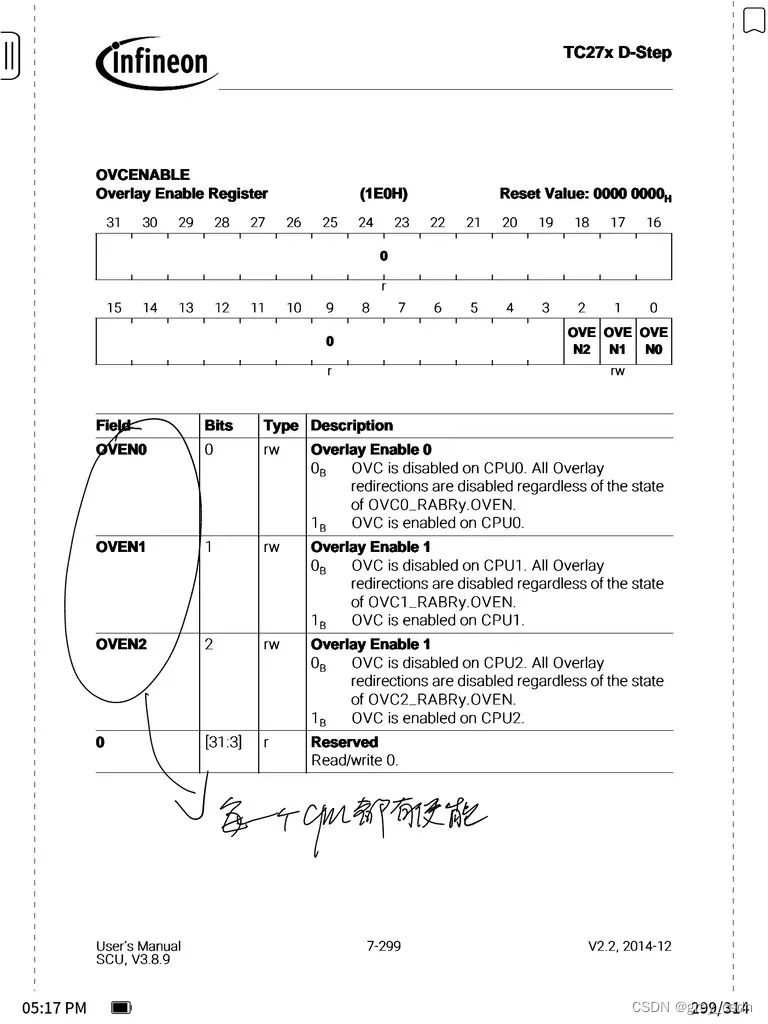
每一个CPU的overlay都有使能控制。
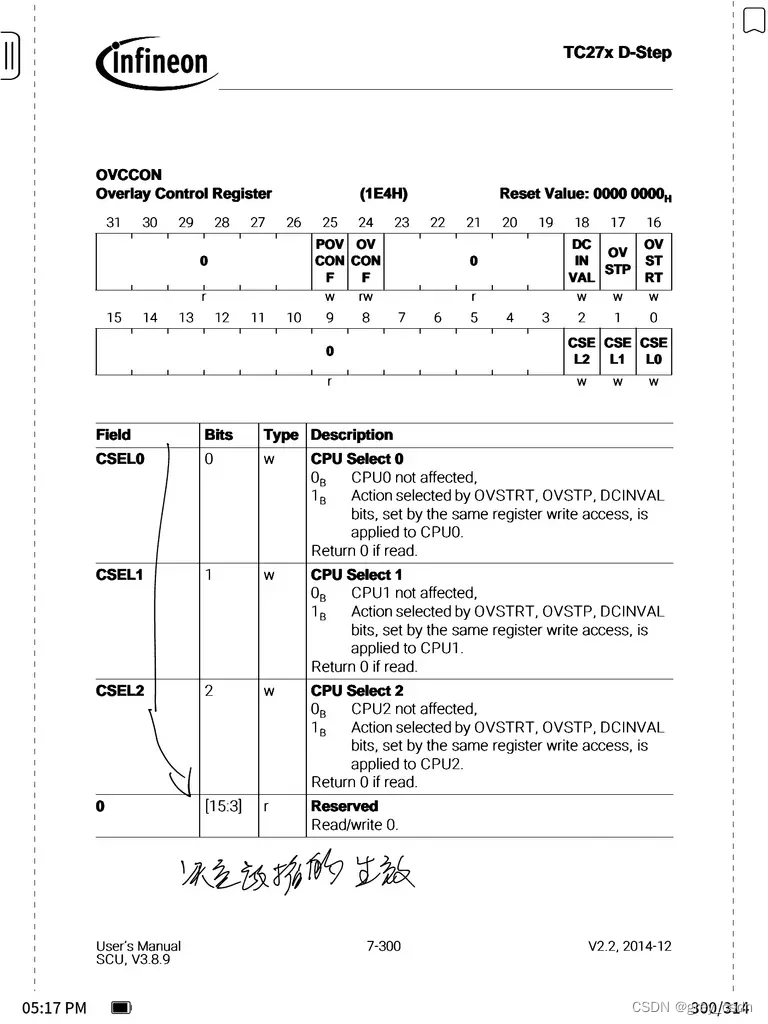
对应着overlay的使能,也有决定数据生效的配置。
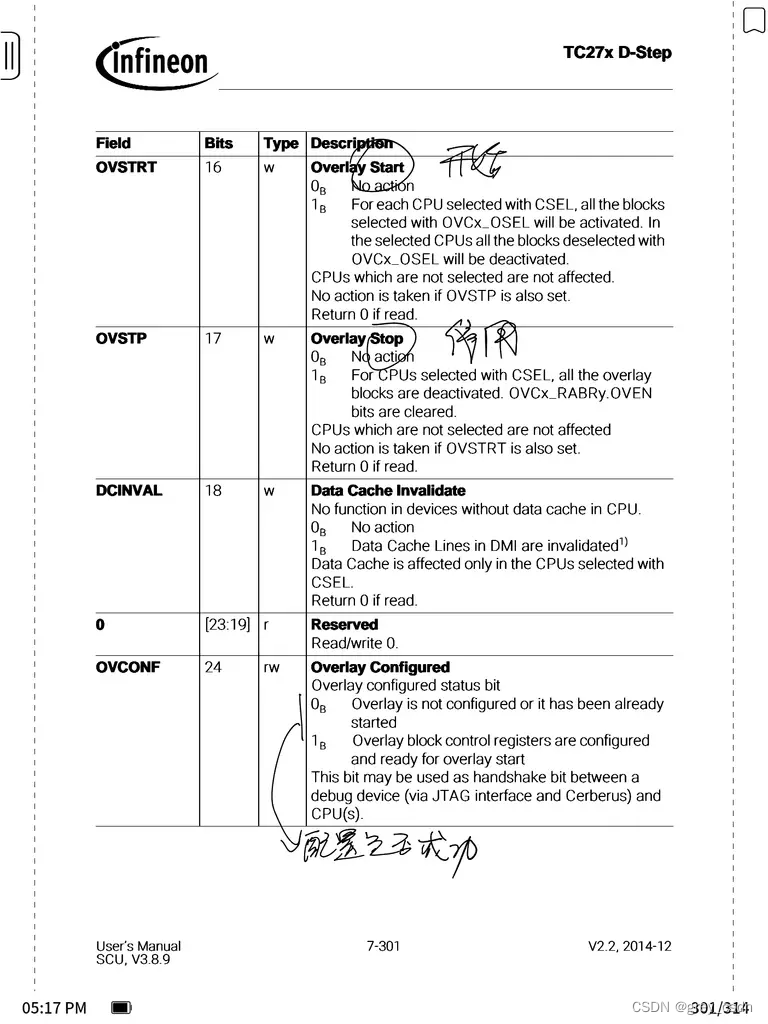
这里提供了几个overlay的控制以及状态:开始、停止、是否成功配置。
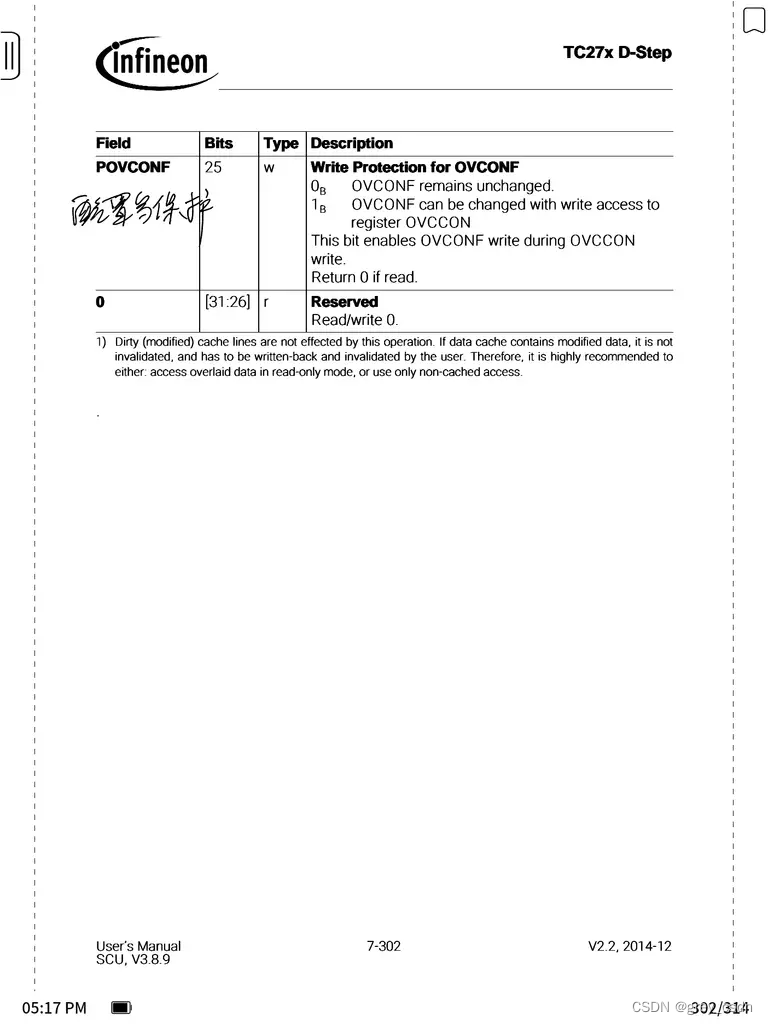
还有一个overlay的配置写保护,防止配置信息的篡改。


![[附源码]计算机毕业设计Python-菜篮子系统(程序+源码+LW文档)](https://img-blog.csdnimg.cn/88f65da81fa34bebb27d8cf706065d0e.png)