本系列教程配套出有视频教程,观看地址:https://www.bilibili.com/video/BV1gV4y1e7Sg
# 2. 创建第一个工程适配串口打印功能本次实验我们通过创建一个简单的工程,在其基础上完成串口打印功能,从而熟悉 e2stduio(Renesas MCU的一个基于Eclipse的集成开发环境(IDE)))和FSP(灵活配置软件包)开发环境。在实验中我们的会比较详细地学习了解,如何在e2studio中对我们的硬件资源进行配置,如何在自己编写代码调用FSP帮我们配置好的 HAL 驱动程序,最终完成我们的任务需求。
这次实验我们的目标是完成串口打印,并能能通过使用 printf 函数打印信息。
2.1创建步骤
2.1.1 创建项目
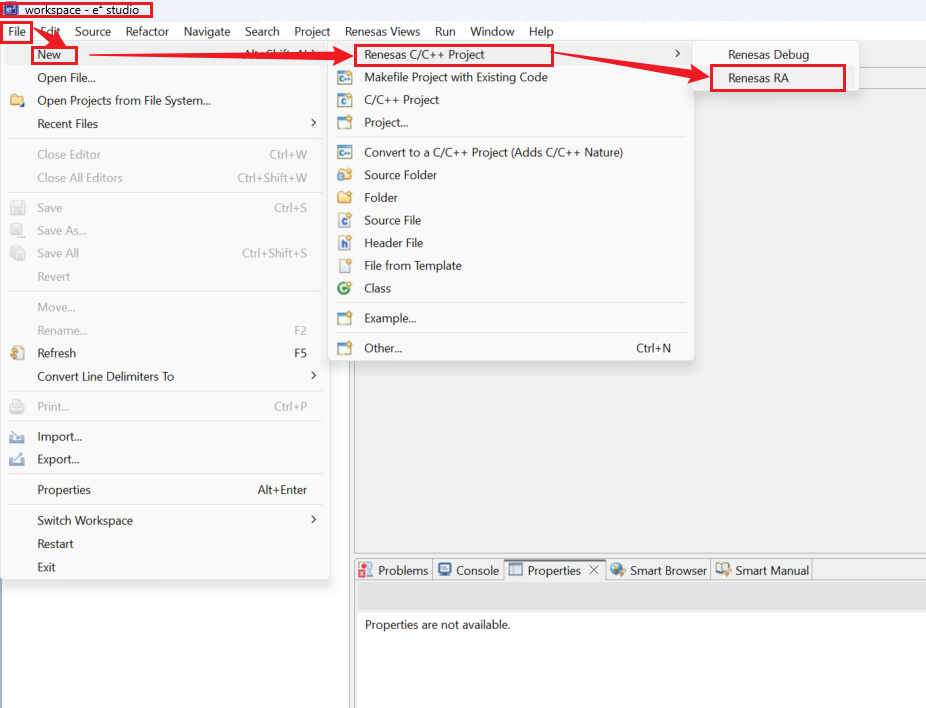
- 打开 e2 studio,并打开 workspace 执行如下步骤:
- 在菜单中选择
“New"。 - 选择
"Renesas C/C++ project"。 - 下拉菜单中选择
"Renesas RA"。
- 在弹出的新窗口按照如下操作:

- 在弹出的新窗口中的
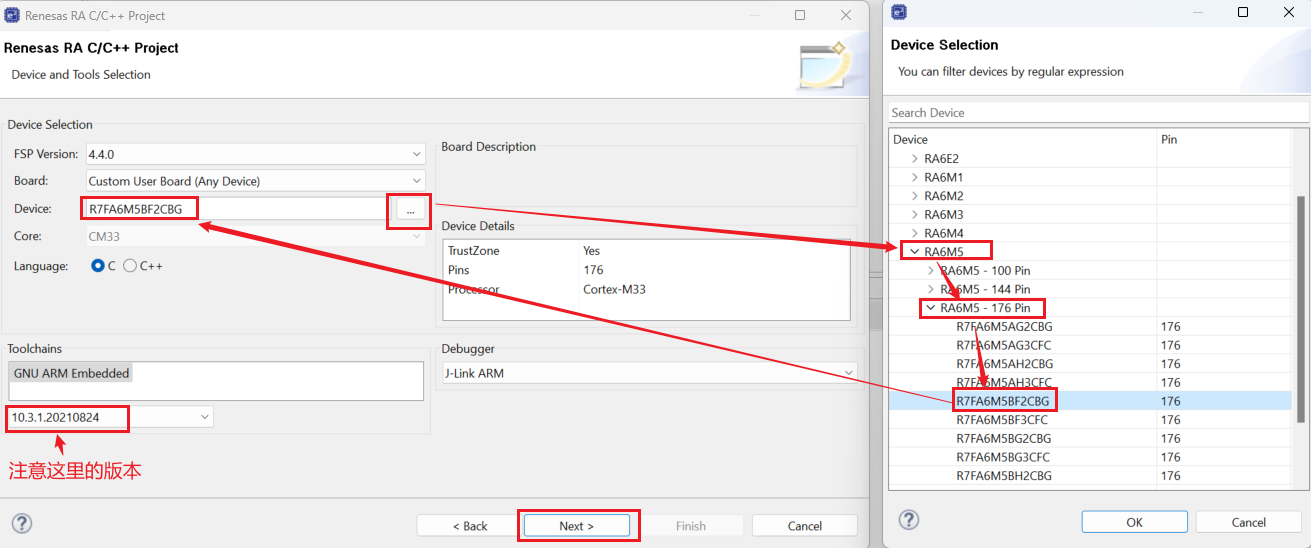
"Project name"处输入项目名称: 00_dshanmcu_ra6m5_uart_printf,您也可以自定义名称。(注意不可以有中文、特殊字符!)
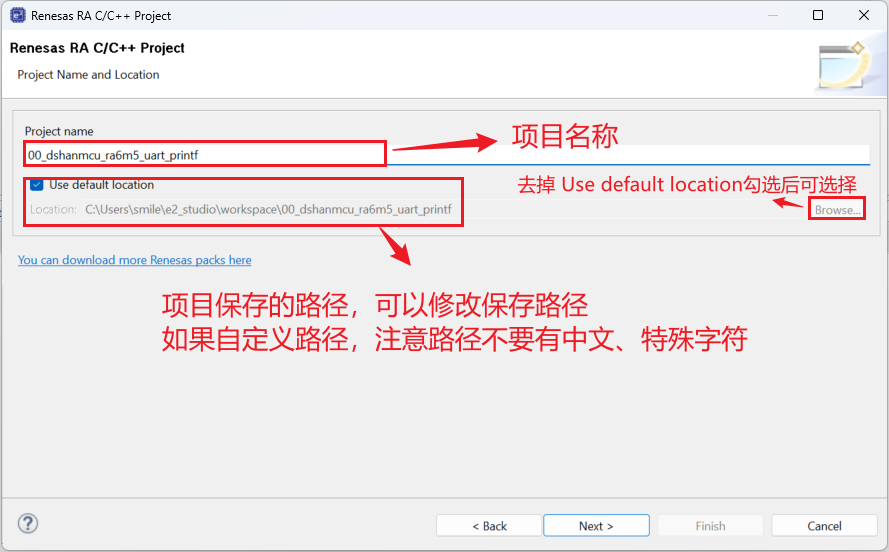
- 在弹出的新窗口中,需要进行一些配置,操作如下图所示:
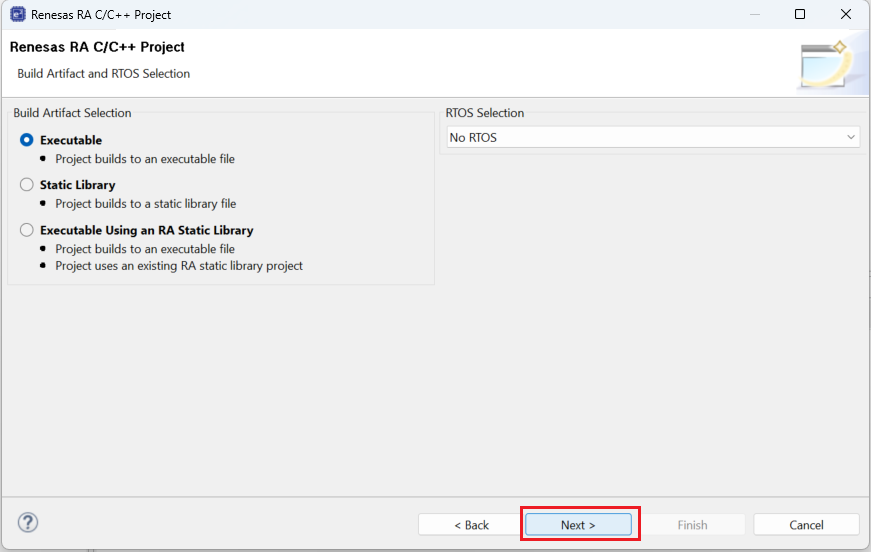
- 下面两个窗口按照默认配置,点击
"Next"按钮即可:
工程类型: Flat (Non-TrustZone) Project
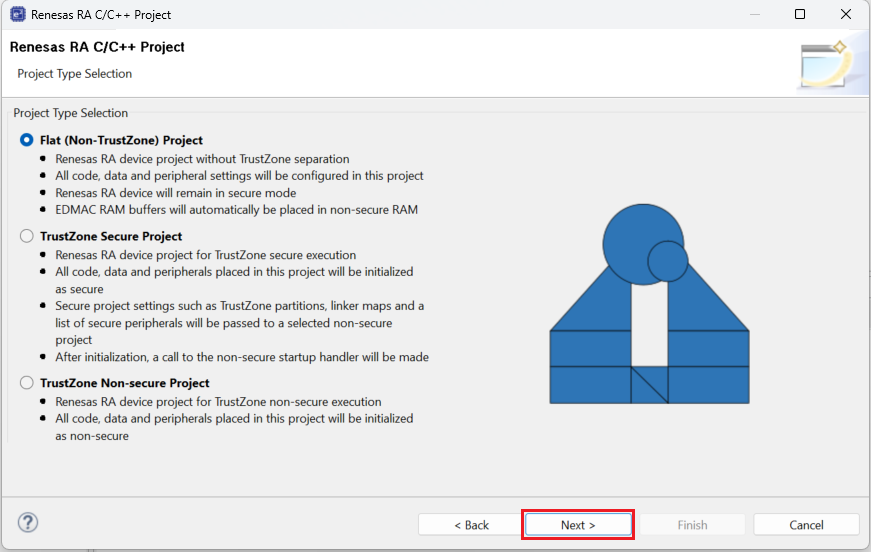
不使用RTOS:No RTOS
如果后续要使用 RTOS 需要重新创建工程,这在实际使用中需要注意。
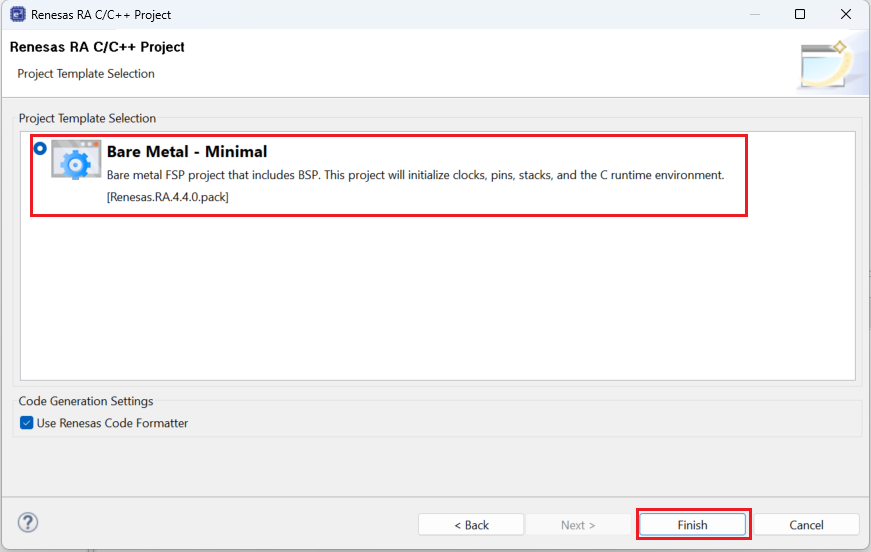
- 最后一个窗口,也不需要进行配置,按照下图所示点击
"Finish"按钮即可:
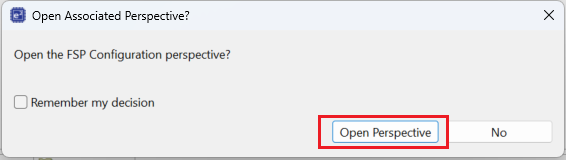
- 点击
"Finish"按钮之后稍等软件进行处理,完成之后会提示这个是否打开"FSP Configuration perspective"点击"Open Perspective"按钮即可:
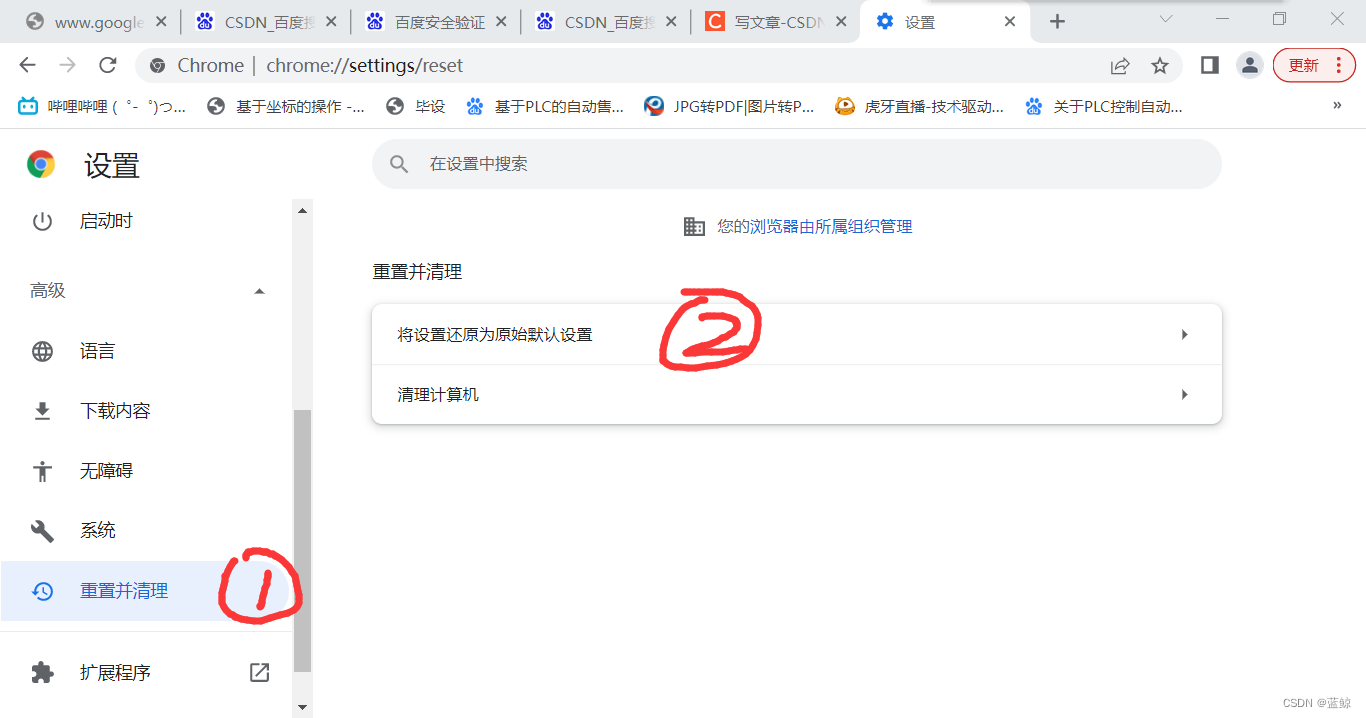
- 最后,我们的 workspce 会呈现这样的界面,下图对默认的 workspace 布局进行简单的说明:

注意:这是使用默认的布局的说明,当你对e2stduio比较熟悉之后可以根据自己的习惯自定义 workspace 布局。如果需要恢复默认的布局,请按照上图的说明进行操作。
2.1.2 调试器配置
这里说的调试器是 瑞萨 EZ-CUBE3 MCU调试器。如果你使用板载DAP,则不需要阅读本小节内容(跳过这里,从 2.1.3 小节继续阅读)。板载DAP的配置请阅读: 在e2studio中使用DAP进行开发调试。
调试器使用注意点:
- 调试器连接到电脑不要通过usb hub(供电不稳定)。
- 调试器并没有对板子供电,因此板子要额外单独供电。
- 调试器转接线接到板子上要确保,板子上两排排针都已经接上,没有裸露出来的排针(参考第一章第2步接线图)。
- 将e2studio中原有的debug配置删除之后,再新建自己的debug配置。
- 如果出现调试器无法工作的情况,将调试器接到电脑的usb线重新插拔,并且删除、新建debug配置之后再重新尝试。
在上面成功创建工程之后,先验证调试器是否可以正常使用,这个过程每个工程只需要配置一次即可,后面我们就是通过这个方式,将代码烧写到开发板中并且进行调试。
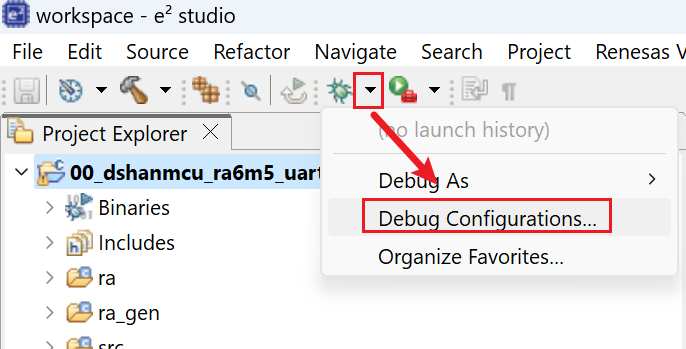
- 按照下图所示,打开配置页面:
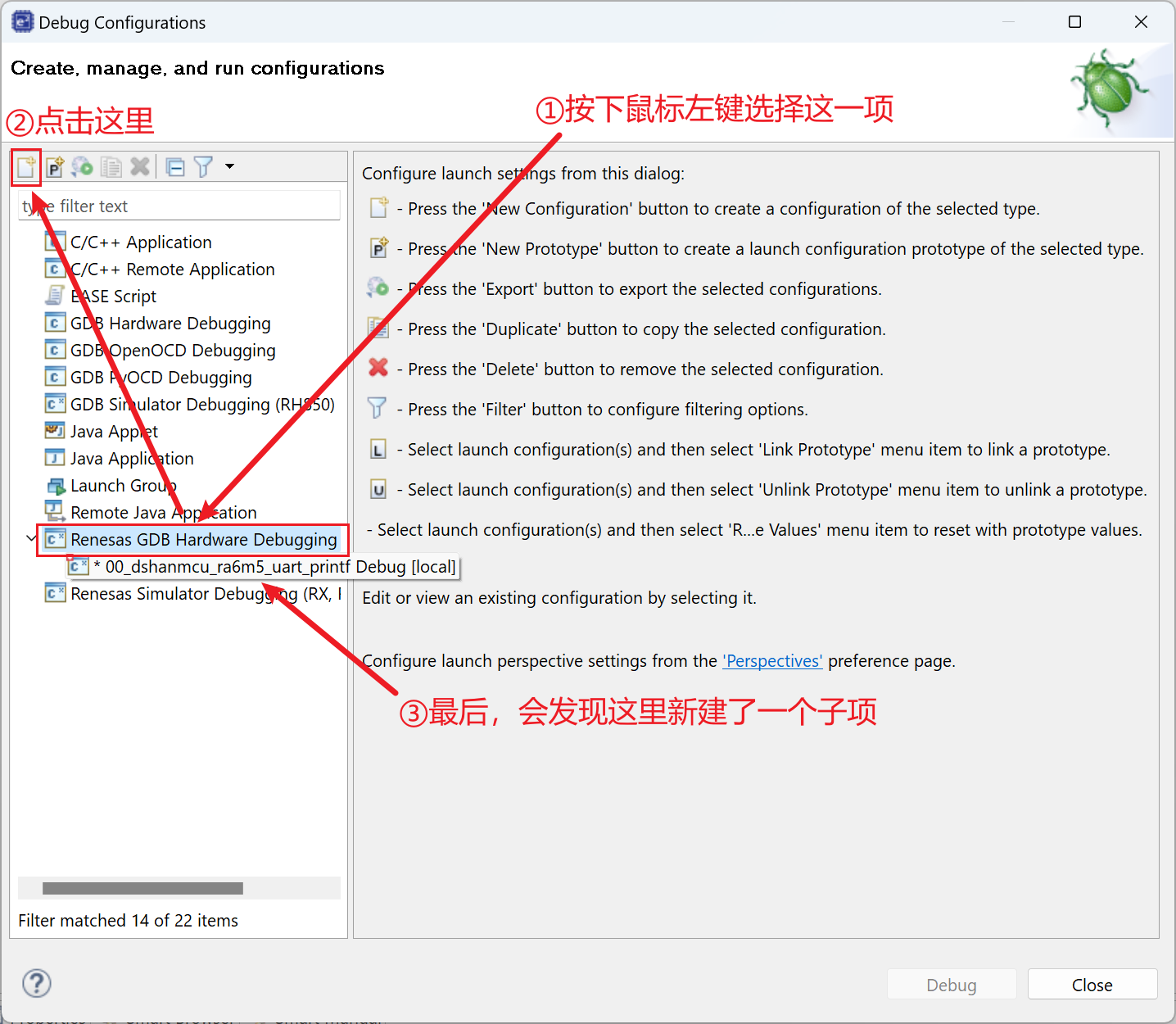
- 进入配置页面后,先创建新的配置文件,如下图所示:
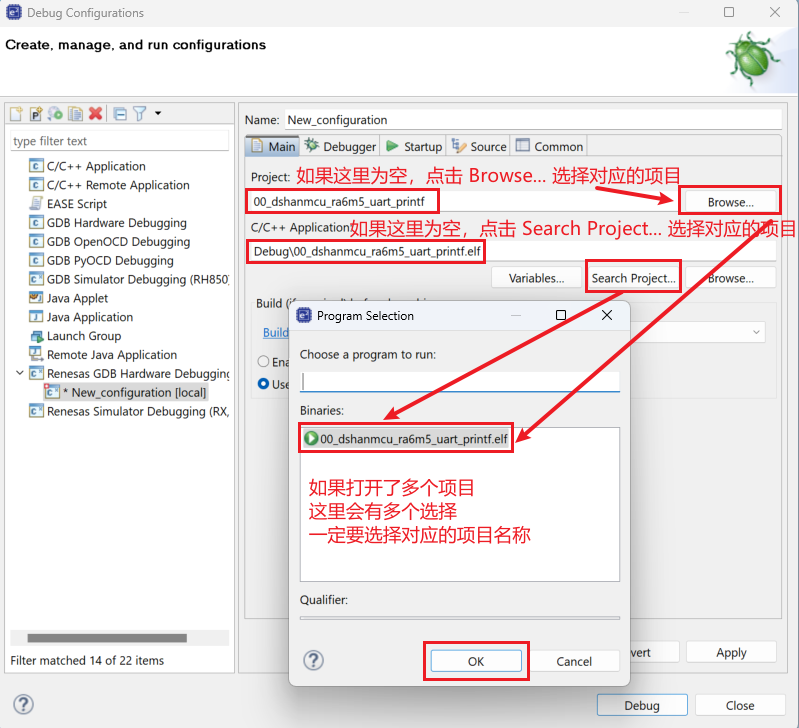
- 继续按下图所示进行操作:
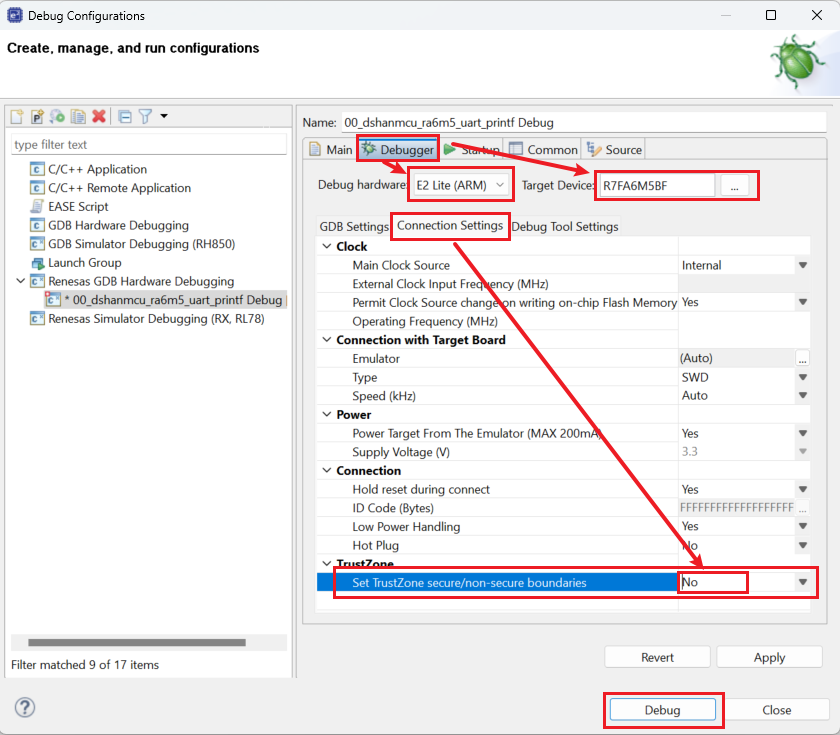
- 如下图所示切换到 Debugger 页面继续进行操作,Target Device粘贴 R7FA6M5BF,注意检查 Connection Settings下的 TrustZone 是否为
No:
-
在上图点击 debug 按钮之后会自动下载代码进入调试模式,如果失败,请返回到第一步逐步进行检查,并且检查硬件接线是否正确。
-
如果修改代码之后,需要再次进入进行debug操作,按照下图所示操作:
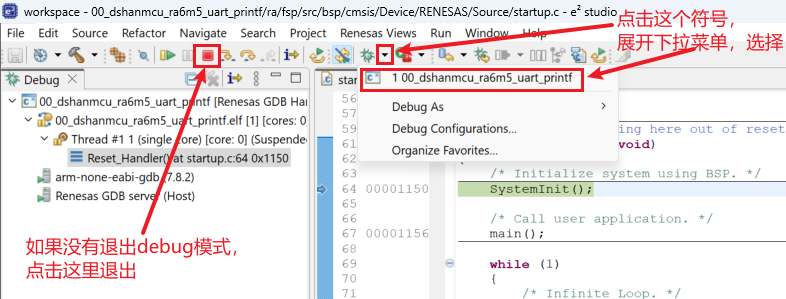
一般来说直接点击上图的debug按钮即可,如果点击debug按钮无法进行调试(报错),请按照上图所示继续操作。
2.1.3 添加 Stacks(r_sci_uart)
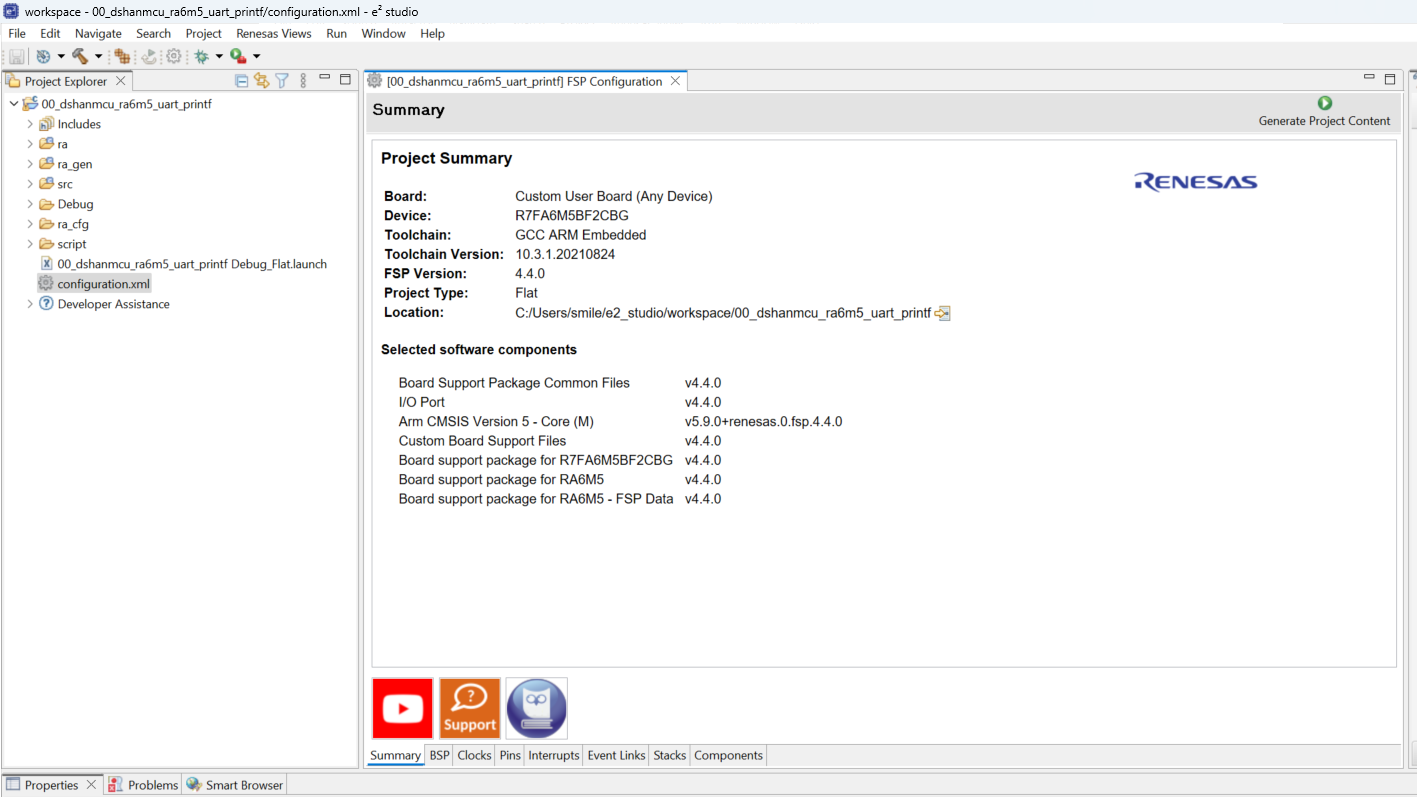
- 打开 FSP Configuration 视图:双击项目文件夹中的
configuration.xml文件。
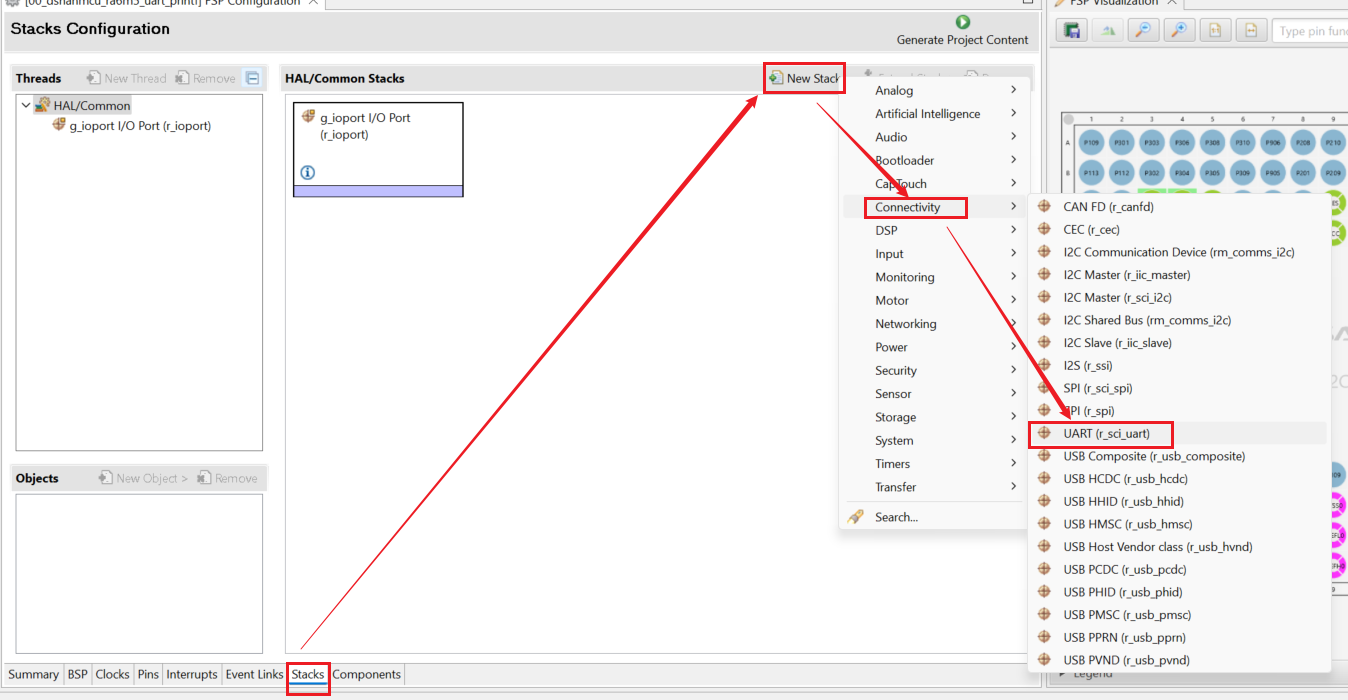
- 按照下图所示,添加
r_sci_uart模块:
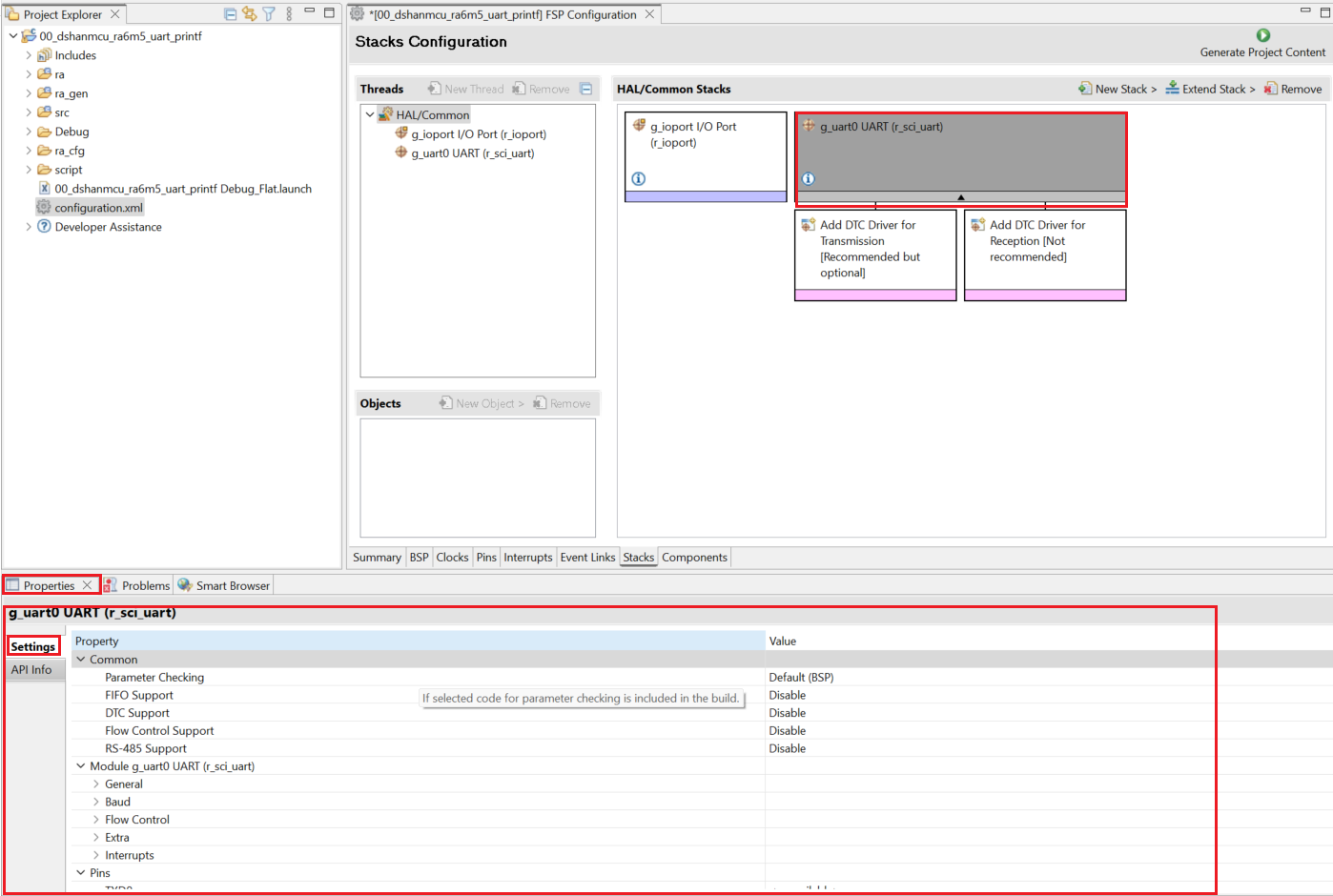
- 点击刚刚添加的
r_sci_uart模块会看到底部窗口的Properties选项卡出现内容了,我们将会在这里对我们的uart进行配置:
2.1.4 配置 Stacks(r_sci_uart)
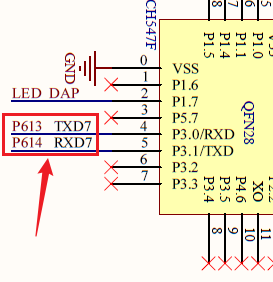
首先进行引脚的配置,先打开原理图确认使用哪一个UART。打开位于03硬件资料\1_开发板原理图\ DshanMCU_RA6M5_V4.0.pdf 的开发板原理图,电路图如下,引脚号是 P613 (TX) 和 P614 (RX) ,它使用 TXD7/RXD7 ,记住这个编号 7,接下来我们根据这个信息对 r_sci_uart 进行配置。
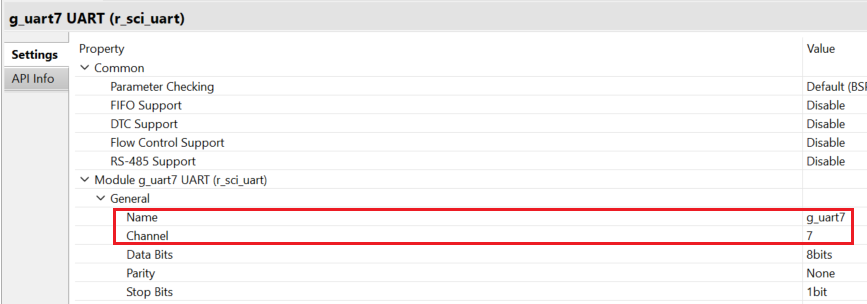
在 "General" 下,修改名称和通道:
- Name: g_uart7
- Channel: 7
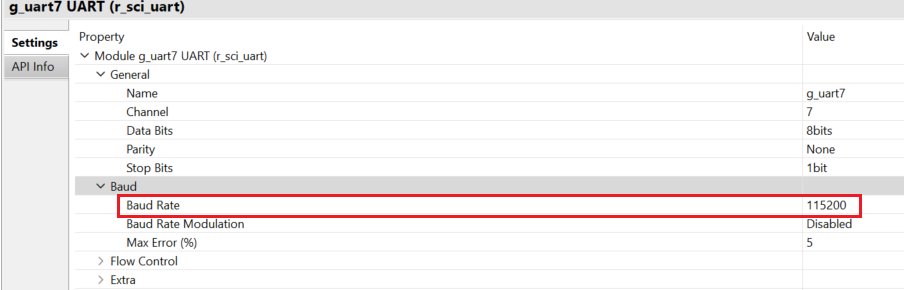
在 "Baud" 下,配置通信波特率为 115200:
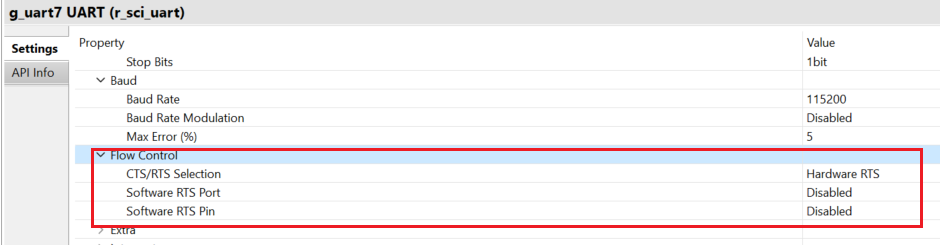
在 "Flow Control" 下,不要修改默认配置,如果修改了需要按下图修改回去:
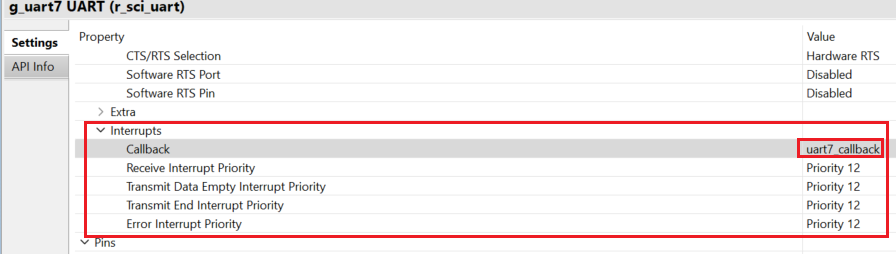
在 "Interrupts" 下,设置 Callback 为 "uart7_callback"(这个函数需要我们实现),其他使用默认配置:
在 "Pins" 下,确认 TXD7 、 TXD6 分别为 P613 、 P614 ,点击下图所示的按钮进行配置:
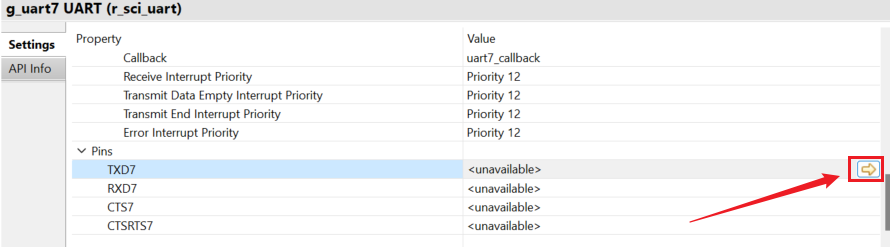
之后在下图所示的区域进行配置:
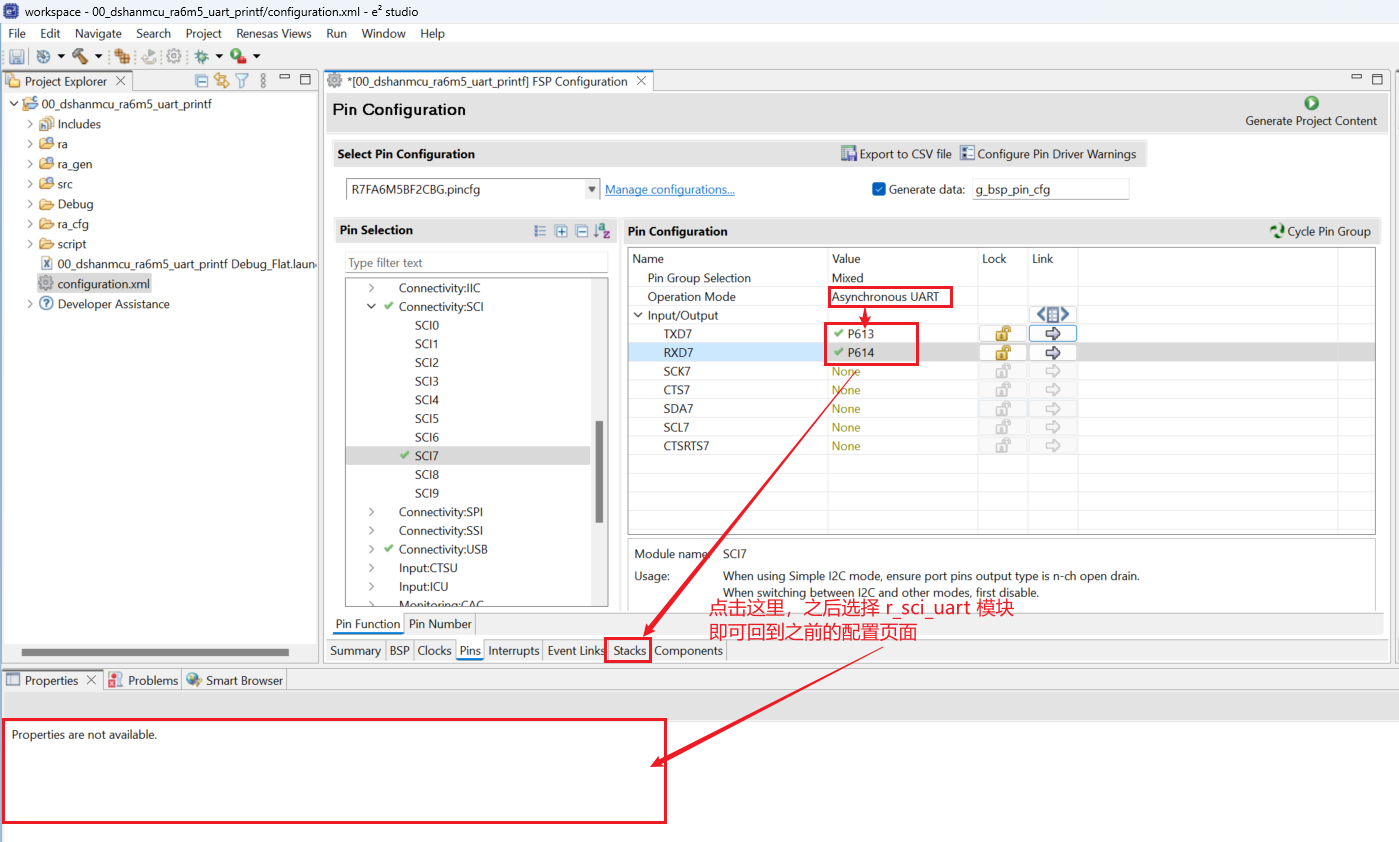
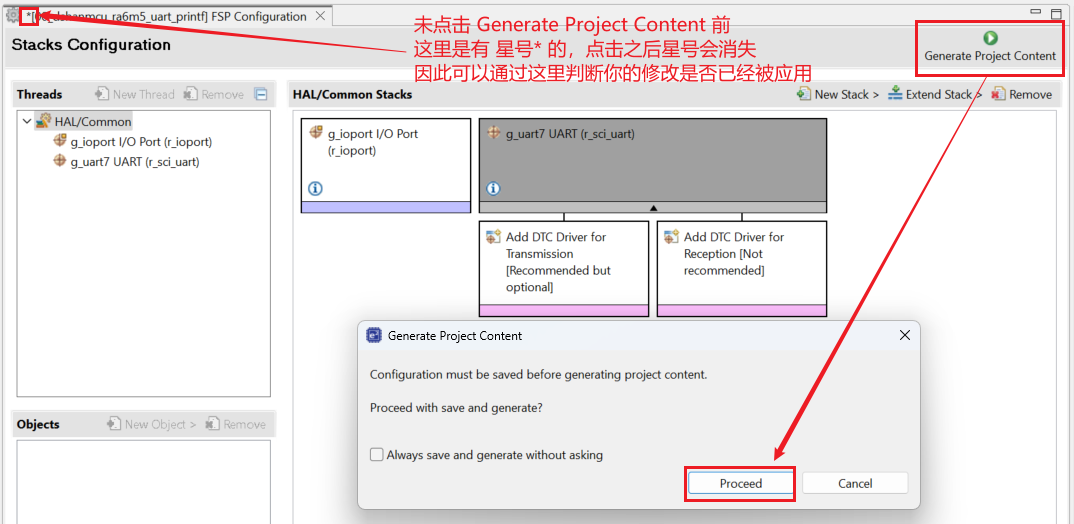
最后检查确认无误,点击右上角的 “Generate Project Content” e2studio就会根据我们对FSP的配置自动配置项目、生成相应的代码。
2.2 配置信息解读
2.2.1 引脚配置信息
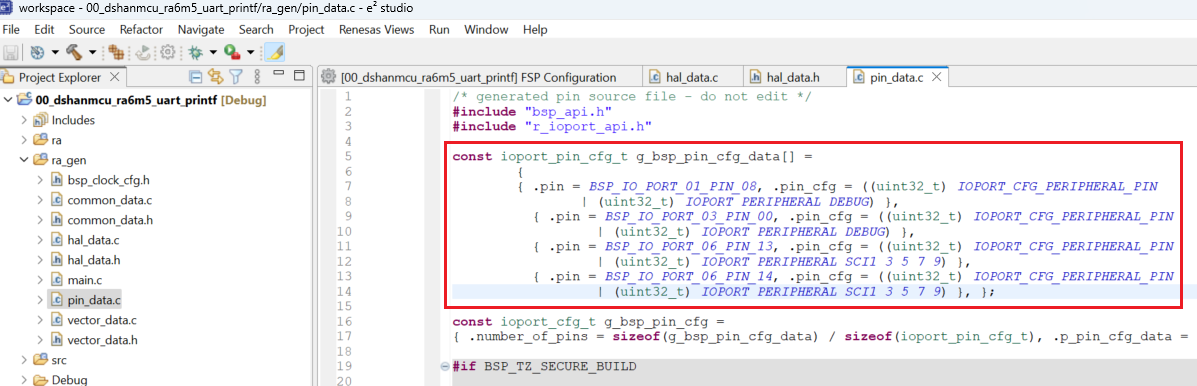
该信息会在 ra_gen\pin_data.c 文件中生成。
在RASC里配置的每一个引脚,都会生成一个 ioport_pin_cfg_t 数组项,里面的内容跟配置时选择的参数一致。代码如下:
2.2.2 UART配置信息
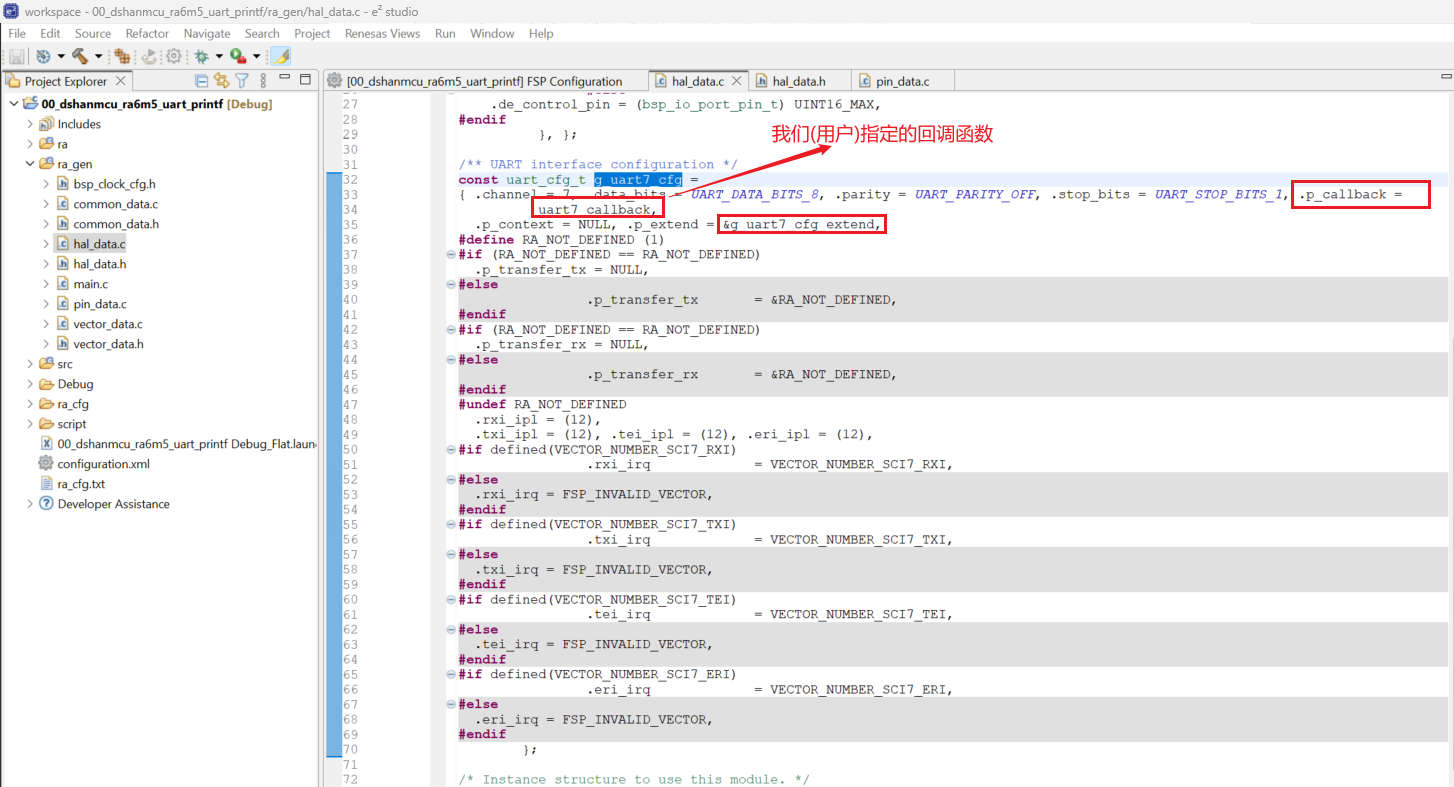
该信息会在 ra_gen\hal_data.c 文件中生成。
指定的UART使用哪个SCI通道、指定了它的,数据格式(数据位/校验位/停止位)、指定了波特率等信息,这些配置信息都被放入一个 uart_cfg_t 结构体:
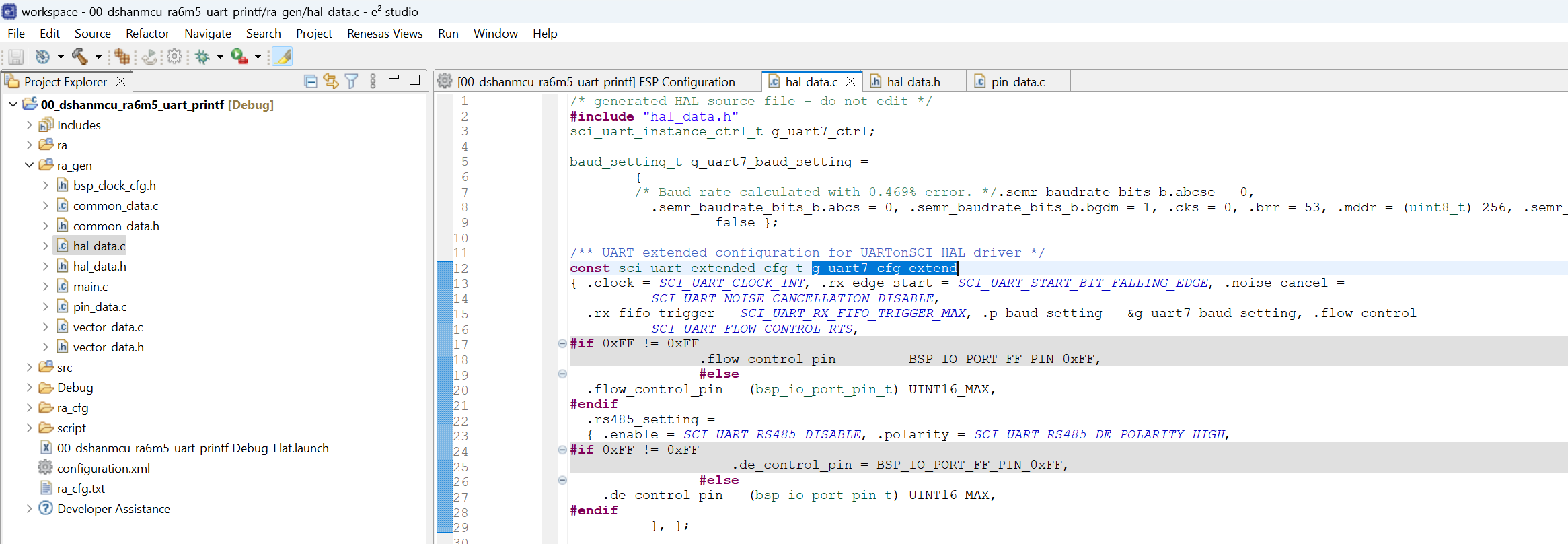
结构体 g_uart7_cfg 里引用到了另一个结构体 g_uart7_cfg_extend ,里面含有时钟、FIFO、流量控制等信息;其中引用了 g_uart7_baud_setting 结构体,代码如下:
2.2.3 API接口
在 \ra\fsp\inc\api\r_uart_api.h 中定义了uart模块的接口,它定义了一个结构体类型 uart_api_t ,内容如下:
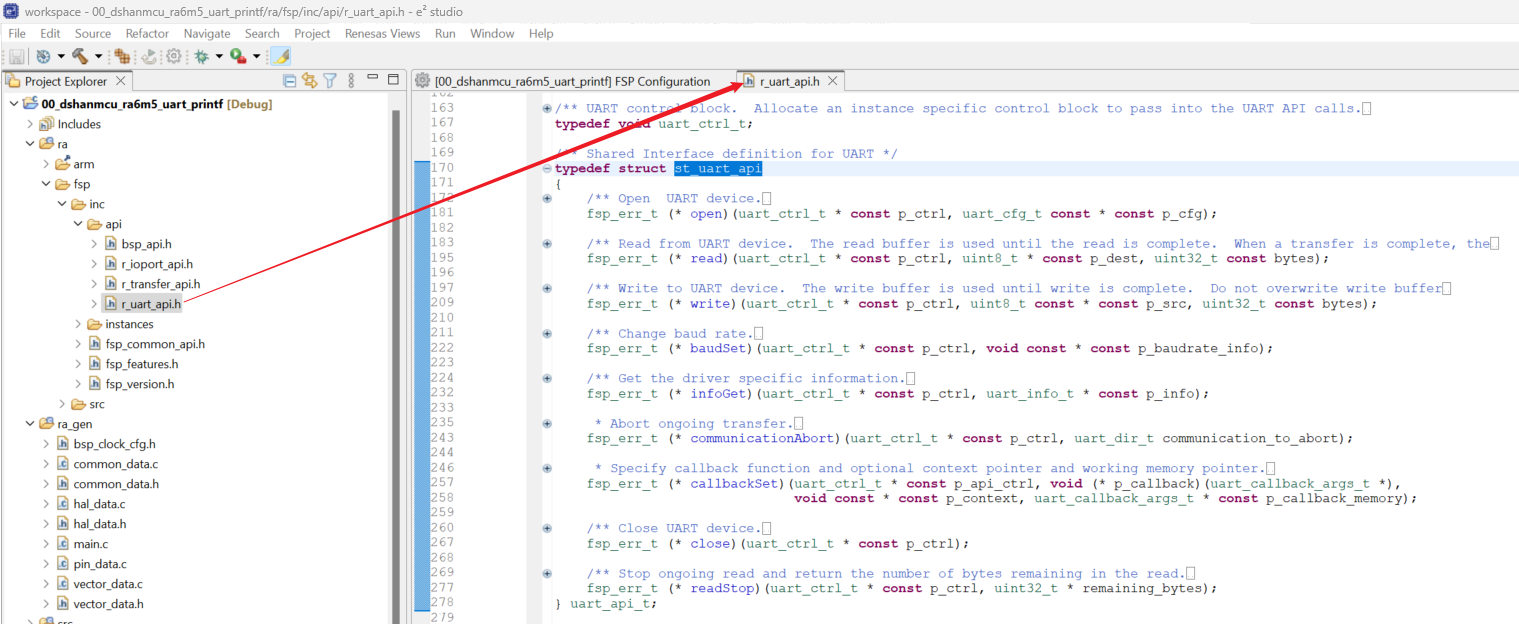
在具体的C文件中,实现了一个 uart_api_t 结构体,比如在 r_sci_uart.c 里实现了如下结构体:

要使用UART收发数据时,可以调用结构体 g_uart_on_sci 里的各个函数指针,也可以直接调用r_sci_uart.c 里实现的各个函数(比如R_SCI_UART_Open、R_SCI_UART_Read)。
2.2.4 中断回调函数
操作一个UART引脚时,要先打开它(open),open 函数会配置UART;然后再调用 read、write 函数读、写串口。需要注意的是,sci_uart 模块里的读、写函数,只是 “启动” 读、写功能,这些函数返0回时并不表示读、写已经完成。后续的读、写操作是由中断函数实现的。在传输过程中,中断函数会调用回调函数来处理各种状态(传输完成?出错?)。
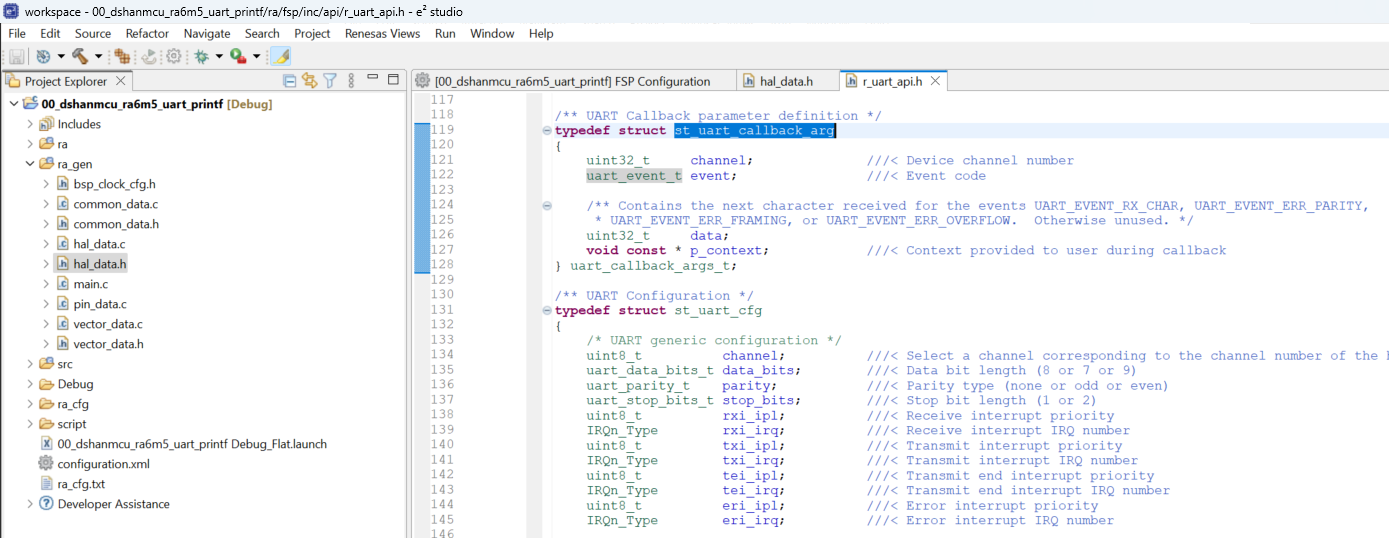
回调函数原型在 \ra_gen\hal_data.h 中定义,如下:

它的 p_args 参数是 uart_callback_args_t 结构体类型,如下:
- 对于接收,有2个event:UART_EVENT_RX_COMPLETE、UART_EVENT_RX_CHAR。前者被调用的时机是:调用read后接收到所有数据时;后者被调用的时机是:未调用read函数,但是接收到了数据。
- 对于发送,有2个event:UART_EVENT_TX_DATA_EMPTY、UART_EVENT_TX_COMPLETE。以发送2个字节的数据为例,前者被调用的时机是:第1个字节已经成功发送完毕,第2个字节已经被移入发送器但是还没发送完毕;后者被调用的时机是:这2个字节都发送完毕。前者先被调用,在“最后一个字节被发送,但是未发送完毕”时被调用;后者在“最后一个字节也完全发送完毕后”被调用。
对于普通的读写操作,可以在回调函数里设置状态标记,用来表示读、写是否已经完成。这样,使用read、write函数启动读、写操作后,就可以轮询这些状态以等待操作完成。
2.3 初始化 uart 并完成串口打印
2.3.1 编写中断回调函数
在初始化uart之前,先确保已经编写uart的中断回调函数,可以在 src\hal_entry.c 文件中添加如下示例代码:
static volatile int g_uart7_tx_complete = 0;
static volatile int g_uart7_rx_complete = 0;
void uart7_callback(uart_callback_args_t * p_args)
{
switch (p_args->event)
{
case UART_EVENT_TX_COMPLETE:
{
g_uart7_tx_complete = 1;
break;
}
case UART_EVENT_RX_COMPLETE:
{
g_uart7_rx_complete = 1;
break;
}
default:
{
break;
}
}
}
void uart7_wait_for_tx(void)
{
while (!g_uart7_tx_complete);
g_uart7_tx_complete = 0;
}
void uart7_wait_for_rx(void)
{
while (!g_uart7_rx_complete);
g_uart7_rx_complete = 0;
}
- 在回调函数里设置全局变量 g_uart7_tx_complete ,表示发送完毕。用户程序在调用write启动UART发送后,就可以调用 uart7_wait_for_tx 以等待发送完毕。
- 在回调函数里设置全局变量 g_uart7_rx_complete,表示接收完毕。用户程序在调用read启动UART接收后,就可以调用 uart7_wait_for_rx 以等待接收完毕。
2.3.2 初始化及进行串口发送
在 src\hal_entry.c 文件中的 hal_entry() 函数里添加如下代码:
void hal_entry(void)
{
fsp_err_t err;
uint8_t msg_len = 0;
uint8_t *p_msg = "Hello, DShanMCU-RA6M5!\r\n";
msg_len = ((uint8_t)(strlen((char *)p_msg)));
/* 配置串口 */
err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);
if(FSP_SUCCESS != err) __BKPT();
while (1)
{
/* 启动发送字符 */
g_uart7.p_api->write(g_uart7.p_ctrl, p_msg, msg_len);
/* 等待发送完毕 */
uart7_wait_for_tx();
R_BSP_SoftwareDelay(1000, BSP_DELAY_UNITS_MILLISECONDS); // delay 1000ms
}
}
2.3.3 验证效果
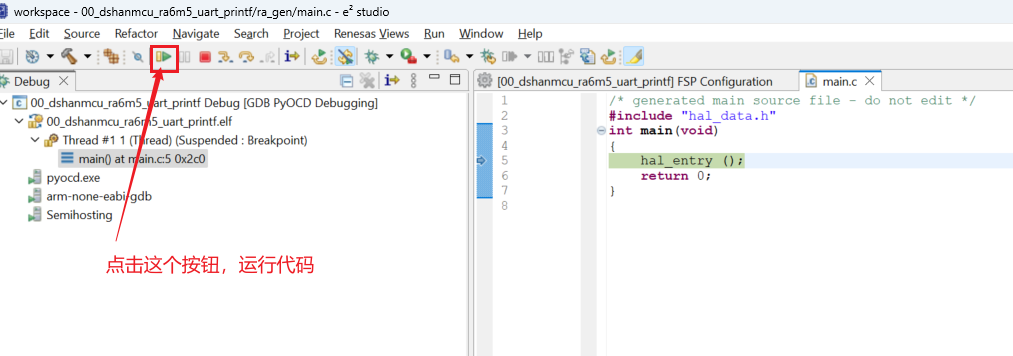
点击编译按钮,再点击debug按钮,将程序烧写到开发板中,如下图所示:

运行代码,如下图所示:
打开串口工具,可以看到每隔1s,打印输出如下信息:
Hello, DShanMCU-RA6M5!
2.4 优化代码
2.4.1 新建一些目录
随着课程的深入,我们的工程会越来越大,代码也会越来越多,因此不能将所有的代码都放在一个文件中,所以我们从这里就开始管理好我们地代码,为后面的实验打下好的基础!
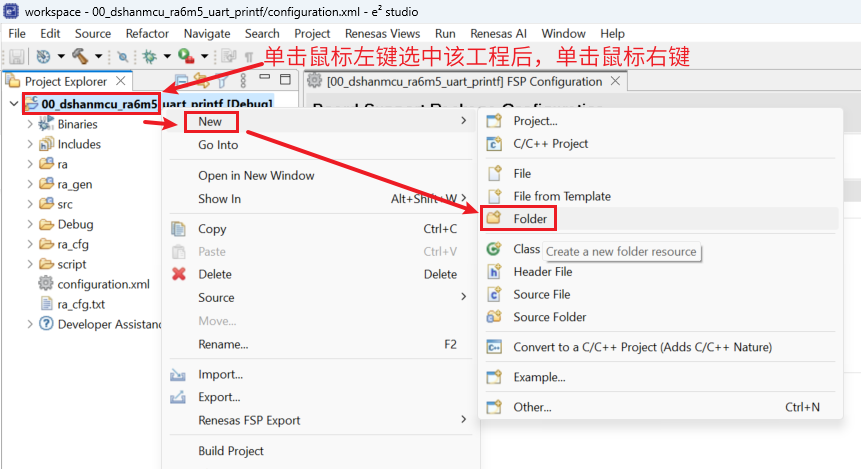
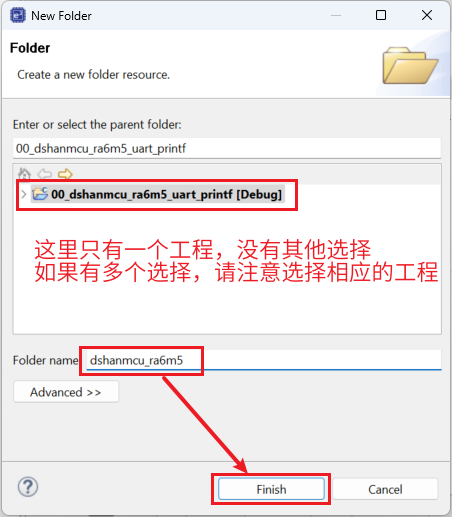
我们可以直接在e2studio中新建目录以及文件,首先在 00_dshanmcu_ra6m5_uart_printf 工程目录下并新建 dshanmcu_ra6m5 目录,如下图所示:
在弹出的窗口中的输入框中输入 dshanmcu_ra6m5,如下图所示:
按照上面的操作,选中新建的dshanmcu_ra6m5 目录,继续在 dshanmcu_ra6m5 中新建三个目录:
- applications:存放我们编写的应用程序,由
src\hal_entry.c文件中的 hal_entry() 函数调用。 - drivers:存放我们编写的各种驱动,比如uart,spi屏、iic触摸、ec11编码器驱动。
- Middlewares:存放我们所使用的第三方库,比如后面使用到的lvgl库。
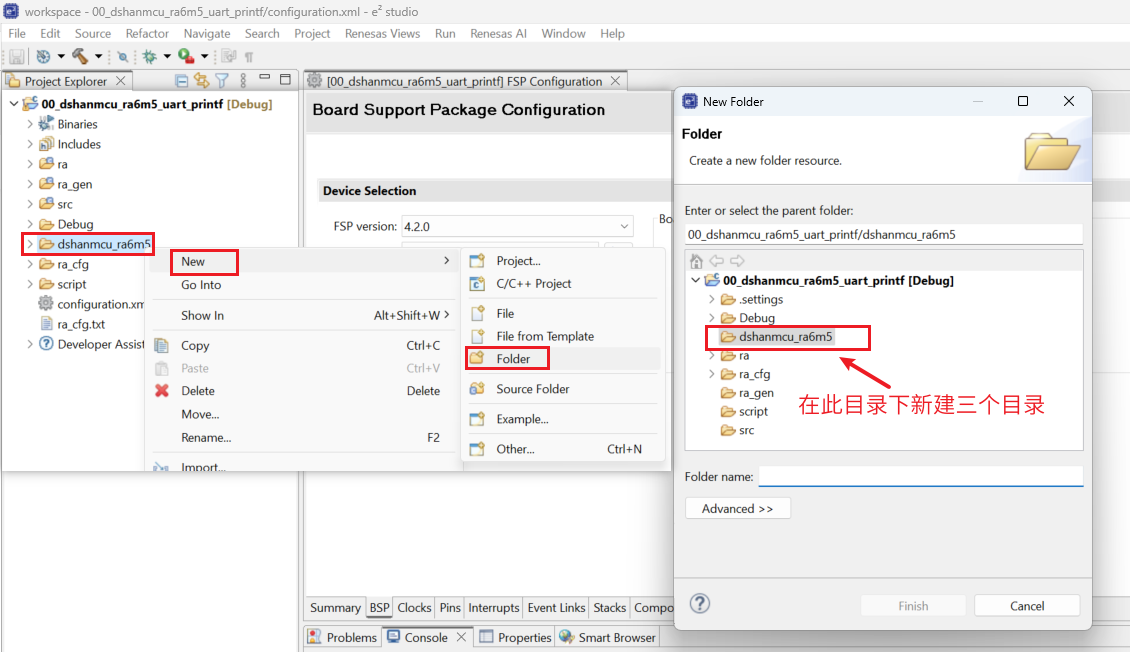
重复上图的步骤三次分别三个目录之后,就能得到下图所示的三个目录:

2.4.2 添加uart驱动
在 00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\drivers 添加uart驱动, 在e2studio中打开 drivers 目录,新建两个文件 drv_uart.c 和 drv_uart.h,如下图所示:
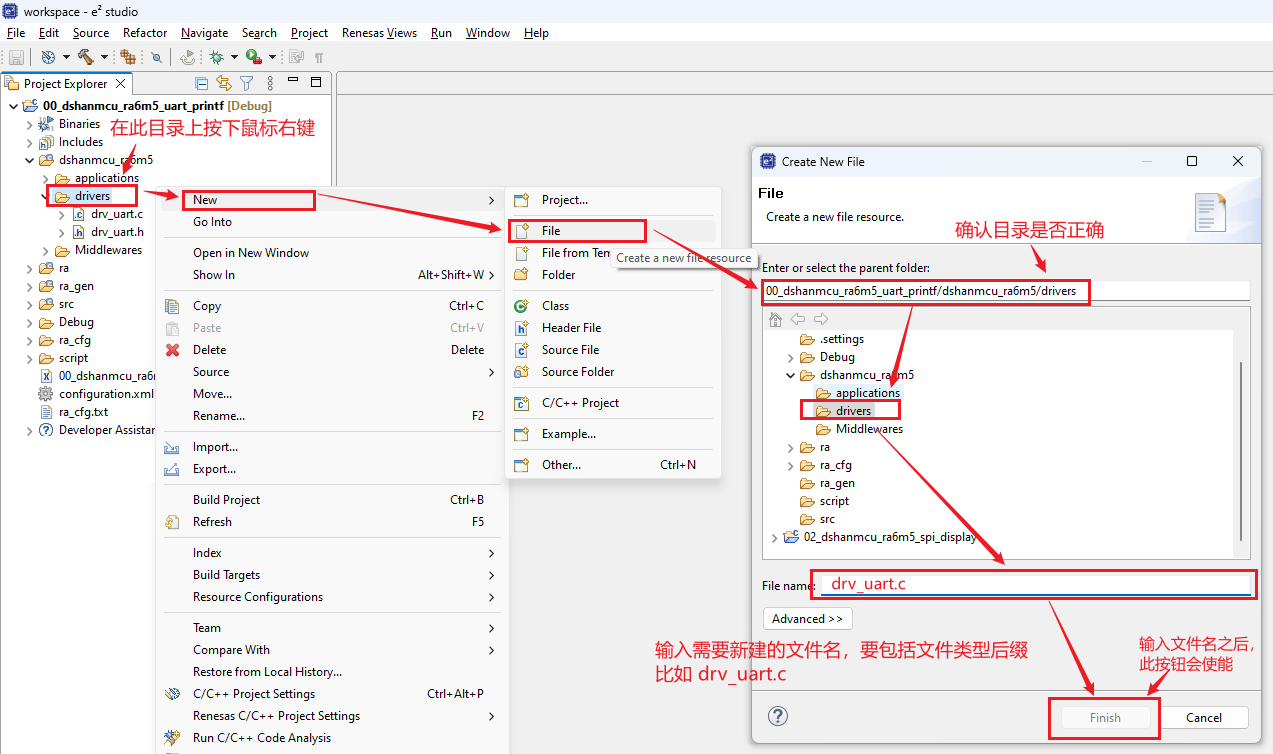
也可以直接在windows资源管理器中找到对应的目录添加文件或目录,这样添加的文件或目录也会自动同步在e2studio的项目列表中。

在e2studio中点击打开 00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\drivers\drv_uart.c 添加下面的代码:
/***********************************************************************************************************************
* Includes
**********************************************************************************************************************/
#include "drv_uart.h"
/**********************************************************************************************************************
* Macro definitions
**********************************************************************************************************************/
/**********************************************************************************************************************
* Typedef definitions
**********************************************************************************************************************/
/***********************************************************************************************************************
* Private function prototypes
**********************************************************************************************************************/
/***********************************************************************************************************************
* Private global variables
**********************************************************************************************************************/
static volatile int g_uart7_tx_complete = 0;
static volatile int g_uart7_rx_complete = 0;
/***********************************************************************************************************************
* Functions
**********************************************************************************************************************/
fsp_err_t drv_uart_init(void)
{
fsp_err_t err;
/* 打开串口 */
err = g_uart7.p_api->open(g_uart7.p_ctrl, g_uart7.p_cfg);
if(FSP_SUCCESS != err) __BKPT();
return err;
}
fsp_err_t drv_uart_test(uint8_t *p_msg)
{
fsp_err_t err;
uint8_t msg_len = 0;
char *p_temp_ptr = (char *)p_msg;
/* 计算长度 */
msg_len = ((uint8_t)(strlen((char *)p_temp_ptr)));
/* 启动发送 */
err = g_uart7.p_api->write(g_uart7.p_ctrl, p_msg, msg_len);
/* 等待发送完毕 */
drv_uart_wait_for_tx();
return err;
}
void drv_uart_wait_for_tx(void)
{
while (!g_uart7_tx_complete); // 阻塞等待
g_uart7_tx_complete = 0;
}
void drv_uart_wait_for_rx(void)
{
while (!g_uart7_rx_complete); // 阻塞等待
g_uart7_rx_complete = 0;
}
void uart7_callback(uart_callback_args_t * p_args)
{
switch (p_args->event)
{
case UART_EVENT_TX_COMPLETE:
{
g_uart7_tx_complete = 1;
break;
}
case UART_EVENT_RX_COMPLETE:
{
g_uart7_rx_complete = 1;
break;
}
default:
{
break;
}
}
}
/***********************************************************************************************************************
* Private Functions
**********************************************************************************************************************/
在e2studio中点击打开 00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\drivers\drv_uart.h 添加下面的代码:
#ifndef DRV_UART_H
#define DRV_UART_H
/***********************************************************************************************************************
* Includes
**********************************************************************************************************************/
#include "hal_data.h"
/**********************************************************************************************************************
* Macro definitions
**********************************************************************************************************************/
/**********************************************************************************************************************
* Typedef definitions
**********************************************************************************************************************/
/***********************************************************************************************************************
* Exported global variables
**********************************************************************************************************************/
/***********************************************************************************************************************
* Exported global functions (to be accessed by other files)
**********************************************************************************************************************/
fsp_err_t drv_uart_init(void);
fsp_err_t drv_uart_test(uint8_t *p_msg);
void drv_uart_wait_for_tx(void);
void drv_uart_wait_for_rx(void);
void uart7_callback(uart_callback_args_t * p_args);
#endif /*DRV_UART_H*/
2.4.3 添加 app 程序
对于比较小的裸机程序,一般直接在 src\hal_entry.c 下编写即可,然而我们的程序会越来越大,功能会越来越多,并且每个实验之间也需要进行区分,因此现在起我们(用户)程序会放在 dshanmcu_ra6m5\applications 目录下。
在 00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\applications 目录下新建两个 app_uart_test.c 和 app.h 文件,如下图所示:

打开 app_uart_test.c 添加如下代码:
/***********************************************************************************************************************
* Includes
**********************************************************************************************************************/
#include "app.h"
#include "drv_uart.h"
/**********************************************************************************************************************
* Macro definitions
**********************************************************************************************************************/
/**********************************************************************************************************************
* Typedef definitions
**********************************************************************************************************************/
/***********************************************************************************************************************
* Private function prototypes
**********************************************************************************************************************/
static fsp_err_t uart_write_msg(uint8_t *p_msg);
/***********************************************************************************************************************
* Private global variables
**********************************************************************************************************************/
/***********************************************************************************************************************
* Functions
**********************************************************************************************************************/
void app_uart_test(void)
{
fsp_err_t err;
uint8_t *p_msg = (uint8_t *)"Hello, DShanMCU-RA6M5!\r\n";
err = drv_uart_init();
if(FSP_SUCCESS != err) __BKPT();
while (1)
{
uart_write_msg(p_msg);
R_BSP_SoftwareDelay(1000, BSP_DELAY_UNITS_MILLISECONDS); // delay 1000ms
}
}
static fsp_err_t uart_write_msg(uint8_t *p_msg)
{
fsp_err_t err;
uint8_t msg_len = 0;
char *p_temp_ptr = (char *)p_msg;
/* 计算长度 */
msg_len = ((uint8_t)(strlen((char *)p_temp_ptr)));
/* 启动发送 */
err = g_uart7.p_api->write(g_uart7.p_ctrl, p_msg, msg_len);
/* 等待发送完毕 */
drv_uart_wait_for_tx();
return err;
}
/***********************************************************************************************************************
* Private Functions
**********************************************************************************************************************/
打开 app.h 添加如下代码:
#ifndef APP_TEST_H
#define APP_TEST_H
/***********************************************************************************************************************
* Includes
**********************************************************************************************************************/
#include "hal_data.h"
/**********************************************************************************************************************
* Macro definitions
**********************************************************************************************************************/
/**********************************************************************************************************************
* Typedef definitions
**********************************************************************************************************************/
/***********************************************************************************************************************
* Exported global variables
**********************************************************************************************************************/
/***********************************************************************************************************************
* Exported global functions (to be accessed by other files)
**********************************************************************************************************************/
void app_uart_test(void);
#endif /*APP_TEST_H*/
2.4.4 调用app
在e2studio中点击打开 00_dshanmcu_ra6m5_uart_printf\src\hal_entry.c ,按照如下步骤进行修改:
- 添加头文件包含:
#include "app.h"
- 将
hal_entry函数修改为如下所示的代码:
void hal_entry(void)
{
/* TODO: add your own code here */
app_uart_test();
#if BSP_TZ_SECURE_BUILD
/* Enter non-secure code */
R_BSP_NonSecureEnter();
#endif
}
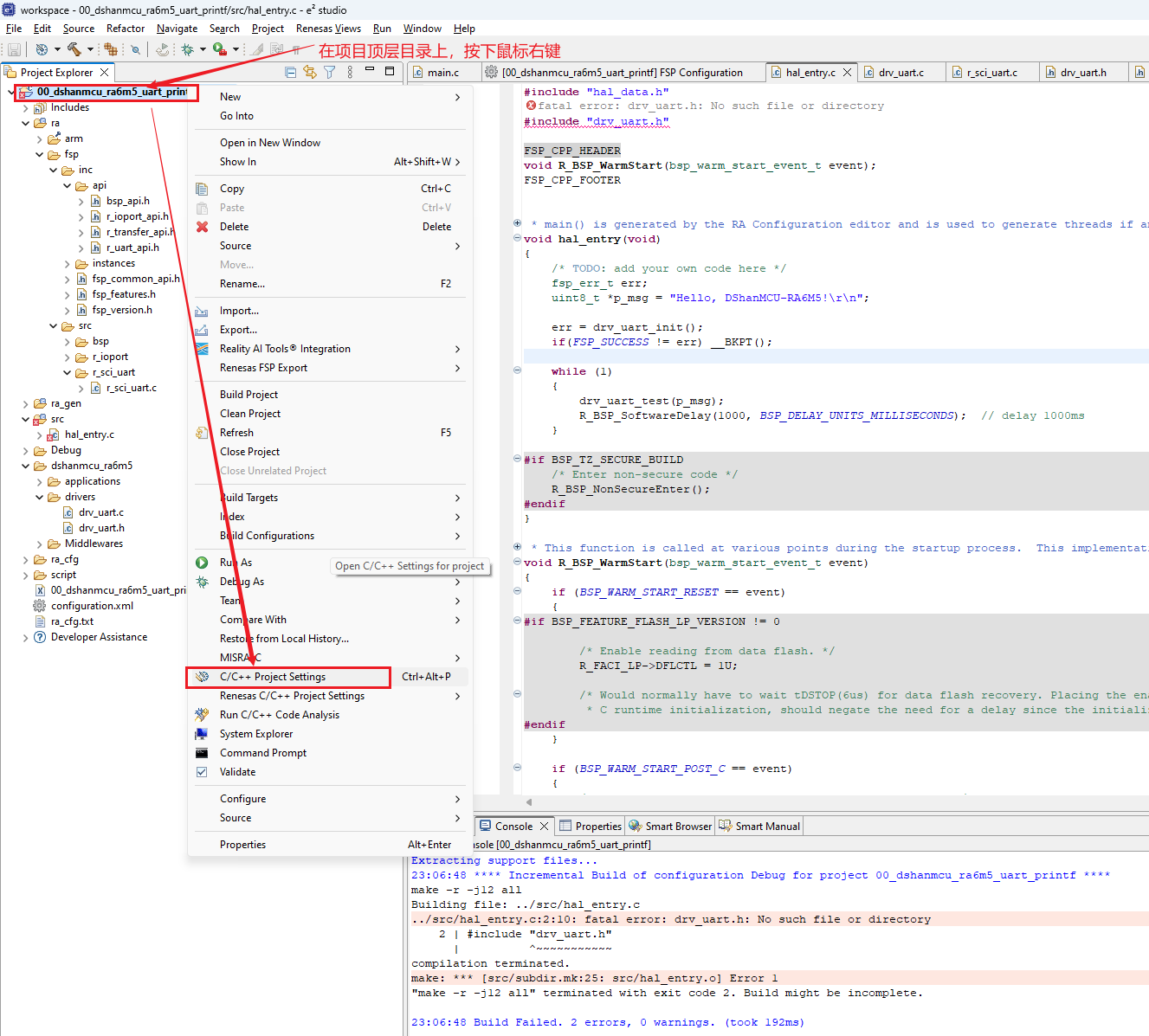
2.4.5 添加编译包含
按照上面的步骤操作之后,点击编译会不通过,因为我们的项目编译配置并不知道我们添加了新的内容,下面进行配置:
- 打开配置窗口:
-
添加头文件检索路径:
按照下图的步骤依次,添加这三个路径:
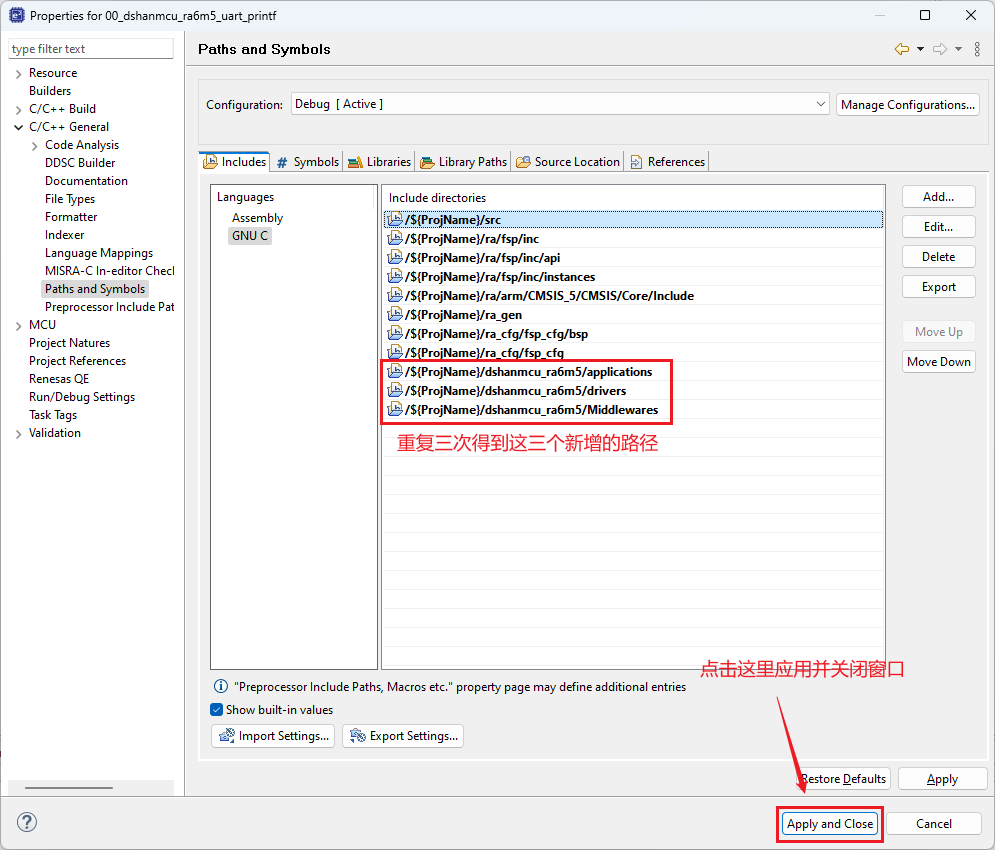
- /${ProjName}/dshanmcu_ra6m5/applications
- /${ProjName}/dshanmcu_ra6m5/drivers
- /${ProjName}/dshanmcu_ra6m5/Middlewares
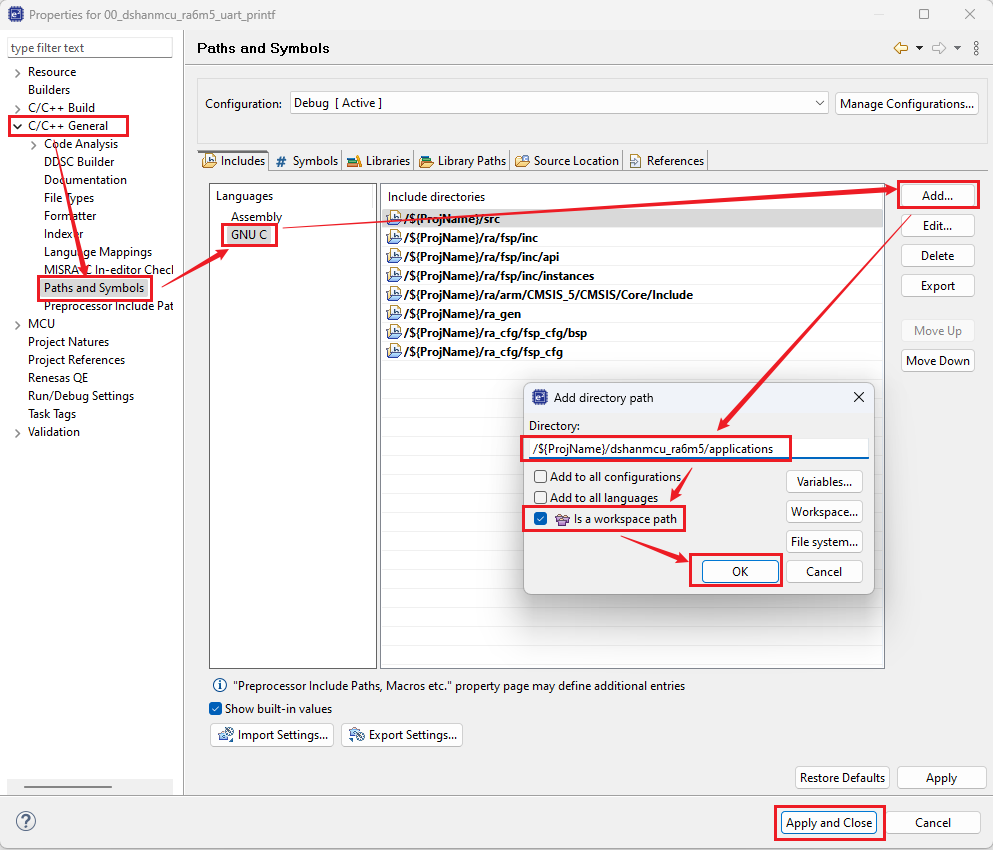
添加上面三个路径之后点击 Apply and Close按钮:
- 添加源文件检索路径:
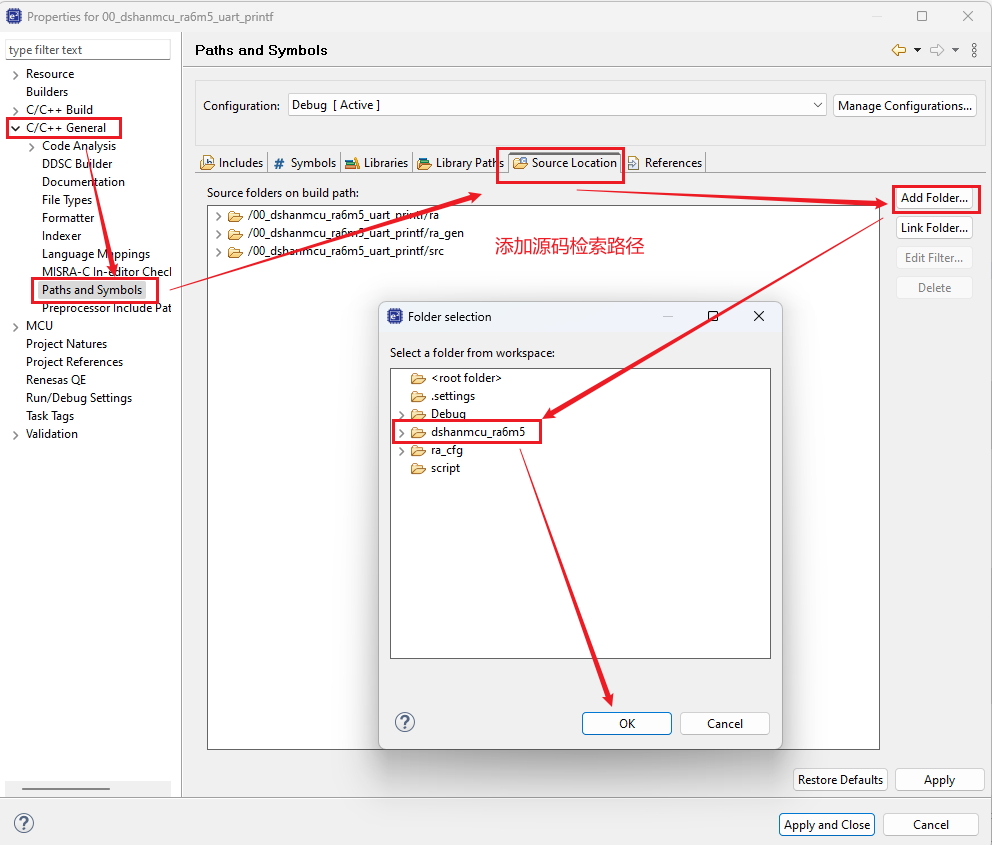
如此配置之后,再点击编译按钮,会发现编译通过了。点击 debug按钮 ,将程序跑起来,会发现运行现象和之前实验的一样。
上述操作只需要进行一次,之后可直接往该文件夹中添加新的代码文件。
2.5 printf输出重定向到串口
这里我们继续优化 drv_uart 的功能,让其能像平时使用c语言那样使用 printf 函数输出打印信息。
点击打开 00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\drivers\drv_uart.c 加入下面的代码:
/*printf输出重定向到串口*/
int __io_putchar(int ch)
{
fsp_err_t err = FSP_SUCCESS;
err = g_uart7.p_api->write(g_uart7.p_ctrl, (uint8_t*)&ch, 1);
if(FSP_SUCCESS != err) __BKPT();
drv_uart_wait_for_tx();
return ch;
}
int _write(int fd, char *pBuffer, int size)
{
((void)fd);
for(int i=0;i<size;i++)
{
__io_putchar(*pBuffer++);
}
return size;
}
在dshanmcu_ra6m5\drivers\drv_uart.h 添加头文件包含和函数声明(去除编译警告):
#include <stdio.h>
/*printf输出重定向到串口*/
int __io_putchar(int ch);
int _write(int fd, char *pBuffer, int size);
在其他需要调用 printf 函数的源文件中,添加 #include <stdio.h> 即可正常使用。
打开00_dshanmcu_ra6m5_uart_printf\dshanmcu_ra6m5\applications\app_uart_test.c 做如下修改:
- 添加头文件包含:
#include <stdio.h>
- 在 uart_write_msg 函数修改为如下所示的代码:
static fsp_err_t uart_write_msg(uint8_t *p_msg)
{
fsp_err_t err;
uint8_t msg_len = 0;
char *p_temp_ptr = (char *)p_msg;
/* 计算长度 */
msg_len = ((uint8_t)(strlen((char *)p_temp_ptr)));
/* 启动发送 */
err = g_uart7.p_api->write(g_uart7.p_ctrl, p_msg, msg_len);
/* 等待发送完毕 */
drv_uart_wait_for_tx();
/*printf打印输出*/
printf("[printf] %s", p_msg);
return err;
}
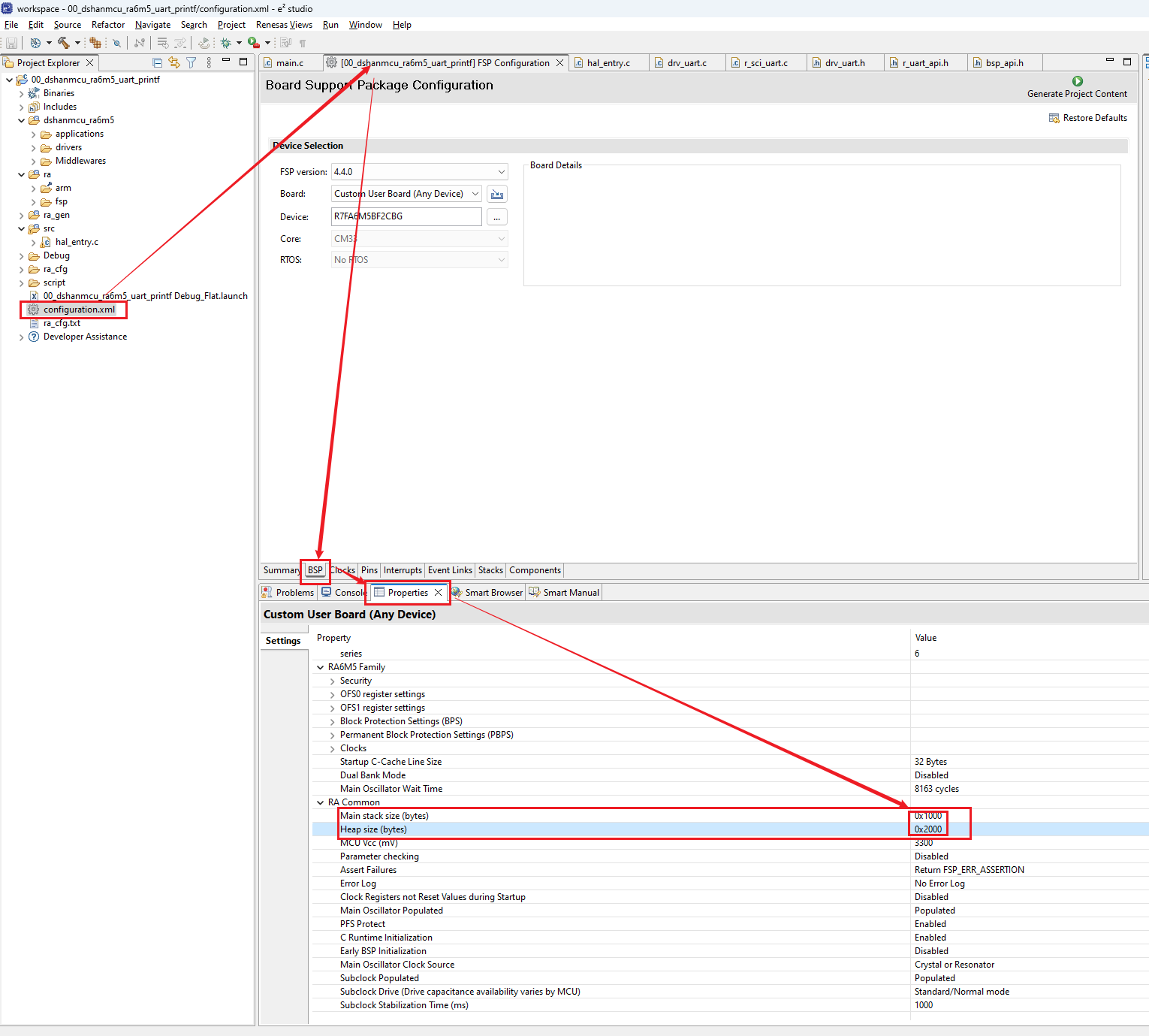
此时还不能编译,因为还需要配置两个地方:堆栈大小和链接配置
-
修改堆栈大小,我们将默认的stack和heap修改为如下所示:
-
Main stack size (bytes): 0x1000
-
Heap size (bytes): 0x2000
-
- 修改链接配置:
打开配置窗口:
进行配置
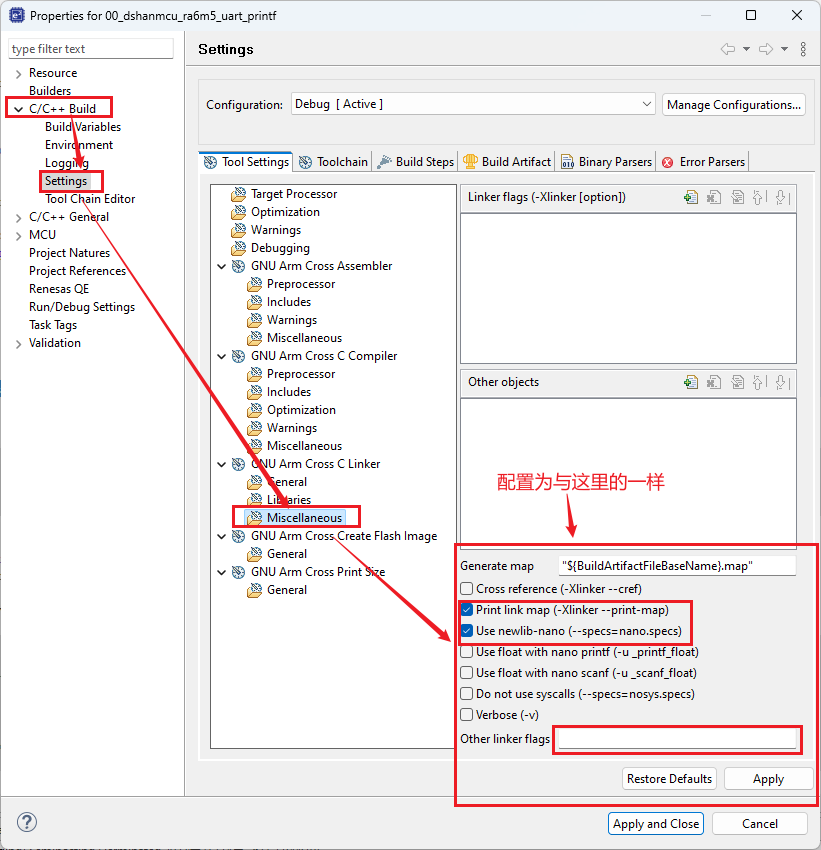
如此配置之后,再点击编译按钮,会发现编译通过了。点击debug按钮,将程序跑起来,会发现运行现象和之前实验的一样,不同的是多了一个如下所示的 “[printf]” 开头的输出,说明printf函数已经可以正常使用。
Hello, DShanMCU-RA6M5!
[printf] Hello, DShanMCU-RA6M5!
Hello, DShanMCU-RA6M5!
[printf] Hello, DShanMCU-RA6M5!
Hello, DShanMCU-RA6M5!
[printf] Hello, DShanMCU-RA6M5!
Hello, DShanMCU-RA6M5!
[printf] Hello, DShanMCU-RA6M5!
Hello, DShanMCU-RA6M5!
[printf] Hello, DShanMCU-RA6M5!
到这里,我们第一个实验已经完成!