3D激光里程计其四:点云线面特征提取
- 1. 点云线面特征提取
- 1.1 按线数分割
- 1.2 计算曲率
- 1.3 按曲率大小筛选特征点
- 2. 基于线面特征的位姿变化
- 2.1 帧间关联
- 2.1.1 点云位姿转换
- 2.1.2 线特征关联
- 2.1.3 面特征关联
- 2.2 残差函数
- 2.2.1 线特征
- 2.2.2 面特征
- 2.3 位姿优化
- 2.3.1 线特征残差雅可比
- 2.3.2 面特征残差雅可比
- 3. 位姿代码实现
- 3.1 ceres 基础知识
- 3.1.1 基本概念
- 3.2 自动求导与解析求导
- 3.2.1 自动求导
- 3.2.2 解析求导
- 3.2.3 自动求导与解析求导的对比
- 3.3 自动求导实现位姿优化(A-LOAM)
- 3.3.1 线特征
- 3.3.2 面特征
- 3.4 解析求导实现位姿优化(F-LOAM)
- 3.4.1 线特征
- 3.4.2 面特征
- 4. 相关开源里程计
- 4.1. 基于特征的里程计实现流程
- 4.2 LOAM
- 4.3 [A-LOAM](https://github.com/HKUST-Aerial-Robotics/A-LOAM)
- 4.4 [F-LOAM](https://github.com/wh200720041/floam)
Reference:
- 深蓝学院-多传感器融合
- LOAM论文和程序代码的解读
1. 点云线面特征提取
1.1 按线数分割
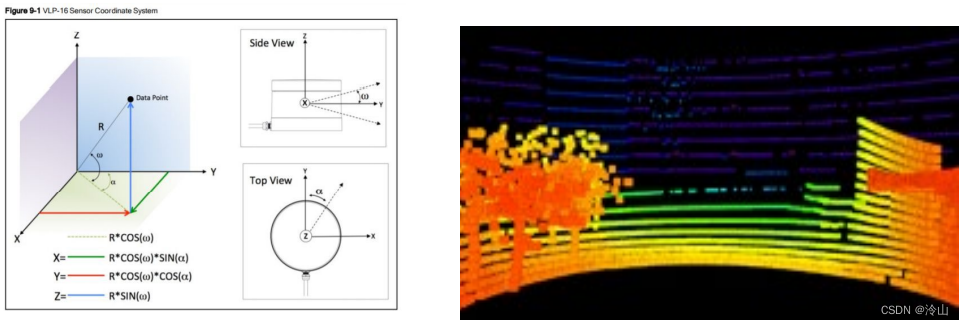
根据激光点坐标,可计算该束激光相比于雷达水平面的倾角
ω
=
arctan
z
x
2
+
y
2
\omega=\arctan \frac{z}{\sqrt{x^2+y^2}}
ω=arctanx2+y2z
根据倾角和雷达内参(各扫描线的设计倾角),可知雷达属于哪条激光束。
1.2 计算曲率

根据前后各5个点与当前点的长度(长度指激光点到雷达的距离)(应该是在同一线下的前后5个点),计算曲率大小(下面公式为LOAM代码中的实现方式,并不是传统意义上的曲率):
c
=
1
∥
X
∥
∥
∑
i
(
X
−
X
i
)
∥
c=\frac{1}{\|X\|}\left\|\sum_i\left(X-X_i\right)\right\|
c=∥X∥1
i∑(X−Xi)
(这里面的
∑
\sum
∑是在范数内,没有问题)该计算方式很明显的体现了这个平面是否平的信息。
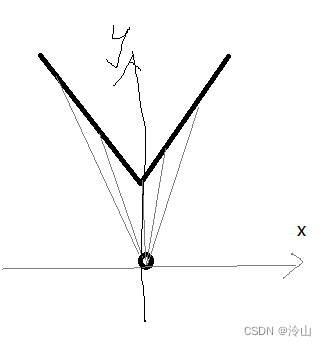
像这种在墙角的情况下,虽然在 x x x方向上很小,但是在 y y y方向很大。
1.3 按曲率大小筛选特征点
一个面上的曲率肯定是小的,而一个线的曲率肯定是大的,那么反过来讲,可以通过曲率大小来划分线特征还是面特征。
线特征和面特征内部的曲率还应该做一些差异上的区别。假如我们求一个点到线的距离的时候,假如这个线上有一百个点,不可能这一百个点都求一个点到线的距离,这个计算量会大到无法接受,这时只能选一部分点来计算点到直线的距离。应该将曲率最大的几个点选出来-----曲率大的点有更大的概率属于一个良好的线特征(错误归进来的点可能并不属于线特征,它们的曲率一般都是比较小的),反之亦然。这样就不会影响求取残差时的结果了。
共分4类:
a. 曲率特别大的点(sharp)
b. 曲率大的点(less_sharp)
c. 曲率特别小的点(flat)
d. 曲率小的点(less_flat)
实际使用时:
a. sharp 为“点到直线”中的“点”
b. sharp 和 less_sharp 为 “点到直线”中的直线
c. flat 为“点到平面”中的“点”
d. flat 和 less flat 为 “点到平面”中的“平面”
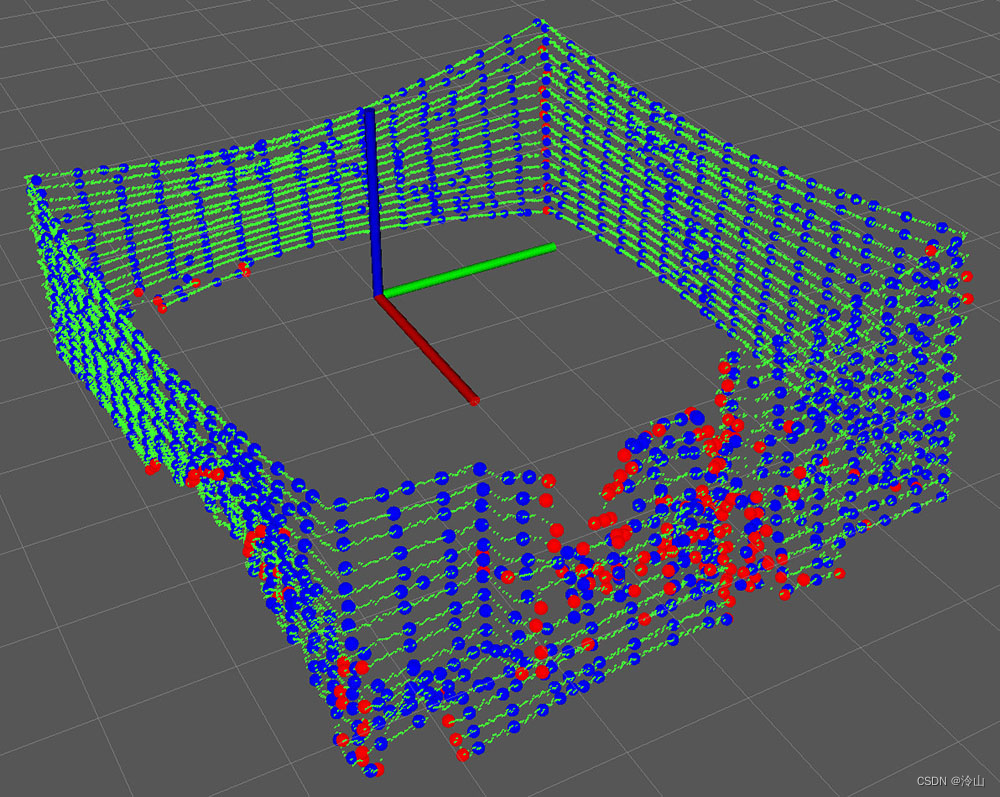
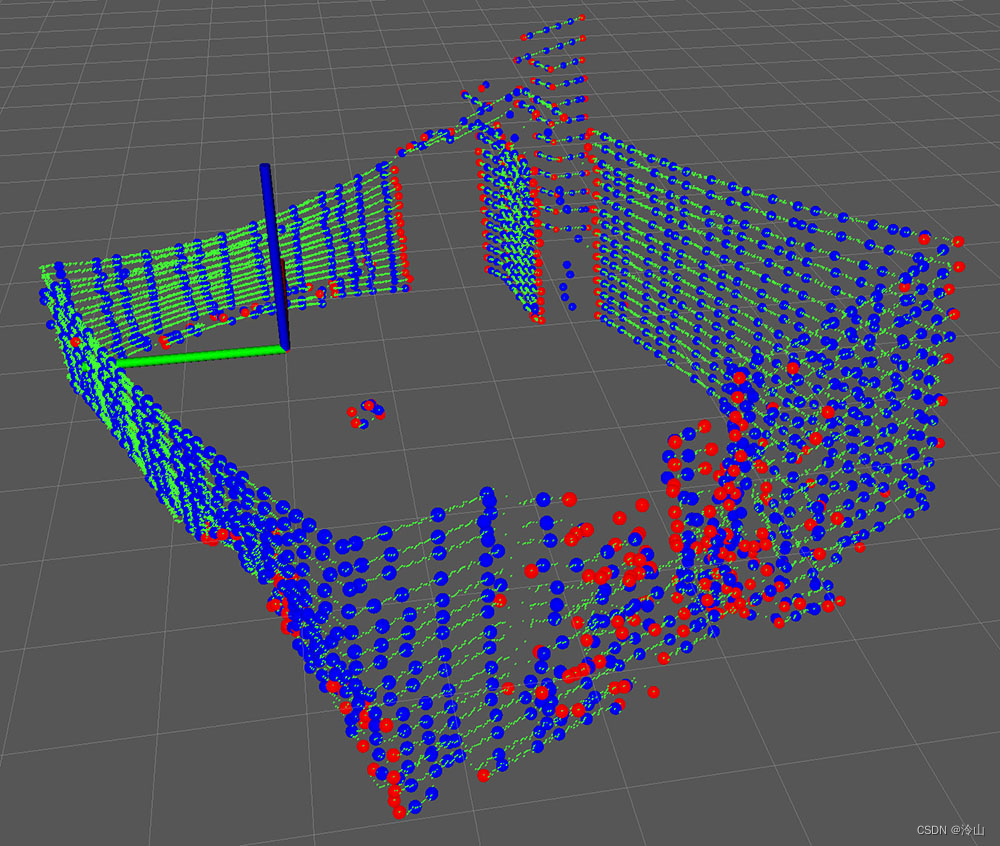
如下图所示,绿色点为velodyne 16线激光雷达的原始点云,扫描环境是卧室,大概就是一个长方体,能够看到点云在垂直方向大致分成了16条线。红色的小圆球是提取出来的角点(曲率特别大的点),蓝色的是平面点。可见,角点基本上位于房间的墙角和过渡较大的地方,例如物体(窗帘)的边缘。

接下来对特征点分的更细一些,除了角点和平面点,还使用了曲率
c
c
c 不太大的点(称为less sharp point),和曲率不太小的点(称为less flat point),下图中红色的小圆就是less sharp point,蓝色的小圆是less flat point。在右侧的图中我把门打开了,可以清晰地看到门口边界有更多的less sharp point。
2. 基于线面特征的位姿变化
现在介绍一下,在得到线面特征之后,怎么进行位姿优化。
假设有两帧 k k k 帧和 k + 1 k+1 k+1 帧,两个里面都有线面特征,两帧之间理论上是有很多线是对应的,也就是说,在 k k k 帧和 k + 1 k+1 k+1 帧的线,有些打在了同样的物体上,这样属于同一个线/面,就可以做关联了。如果 k k k 帧和 k + 1 k+1 k+1 帧的线不重合,那肯定就是位姿和误差导致的。也就是说,我们可以通过线/面是否重合,来反推出第 k + 1 k+1 k+1 帧相对于第 k k k 帧是什么样子的,这就是我们想要的里程计了。
2.1 帧间关联
2.1.1 点云位姿转换
第 k + 1 k+1 k+1 帧与第 k k k 帧的相对位姿为: T = [ R t 0 1 ] T=\left[\begin{array}{ll}R & t \\ 0 & 1\end{array}\right] T=[R0t1]
k+1 帧中的点 p i p_i pi 转到第 k 帧坐标系: p ~ i = R p i + t \tilde{p}_i=R p_i+t p~i=Rpi+t
这里可以先使用第 k k k 帧与第 k − 1 k-1 k−1 帧的相对位姿,先猜测一个第 k + 1 k+1 k+1 帧与第 k k k 帧的相对位姿的近似值。
2.1.2 线特征关联
当
p
i
p_i
pi 为 sharp 时(用曲率大的点),在上一帧中搜索离
p
~
i
\tilde{p}_i
p~i 最近的线特征点,并在相邻线上再找一个线特征点,组成直线。这时用
k
+
1
k+1
k+1 上的一个点,在第
k
k
k 帧中,找到了这个线特征对应的线,有了点和线,就可以求点到直线的距离了。

2.1.3 面特征关联
当
p
i
p_i
pi 为 flat 时,在上一帧中搜索离
p
~
i
\tilde{p}_i
p~i 最近的面特征点,并在相邻线上找两个面特征点,组成平面。(同一个线上找一个,相邻线上再找一个,三个点构成一个面)

2.2 残差函数
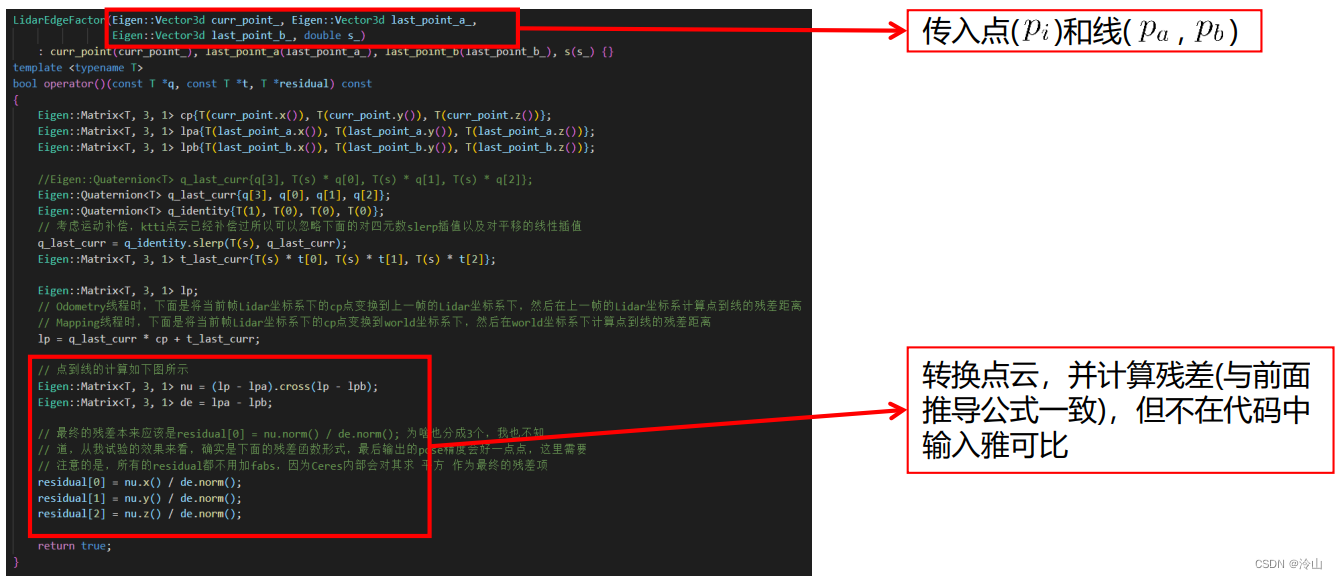
2.2.1 线特征
点到直线的距离:
d
E
=
∣
(
p
~
i
−
p
b
)
×
(
p
~
i
−
p
a
)
∣
∣
p
a
−
p
b
∣
d_{\mathcal{E}}=\frac{\left|\left(\tilde{p}_i-p_b\right) \times\left(\tilde{p}_i-p_a\right)\right|}{\left|p_a-p_b\right|}
dE=∣pa−pb∣∣(p~i−pb)×(p~i−pa)∣在实际代码中,使用的是矢量形式,而不是直接取模,其实在求残差函数时,都是求的
f
T
f
f^Tf
fTf,区别不大吗:
d
E
=
(
p
~
i
−
p
b
)
×
(
p
~
i
−
p
a
)
∣
p
a
−
p
b
∣
d_{\mathcal{E}}=\frac{\left(\tilde{p}_i-p_b\right) \times\left(\tilde{p}_i-p_a\right)}{\left|p_a-p_b\right|}
dE=∣pa−pb∣(p~i−pb)×(p~i−pa)
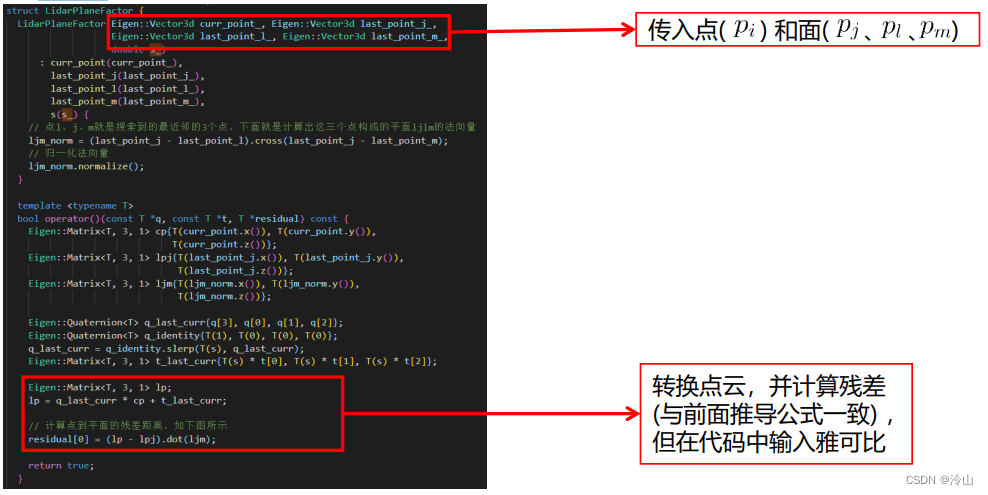
2.2.2 面特征
点到平面的距离
d
H
=
∣
(
p
~
i
−
p
j
)
∙
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
∣
【】】】】】】】】】】】】】】】】】】】】】】】】】】】】
d_{\mathcal{H}}=|\left(\tilde{p}_i-p_j\right) \bullet \frac{\left(p_l-p_j\right) \times\left(p_m-p_j\right)}{\left|\left(p_l-p_j\right) \times\left(p_m-p_j\right)\right|}| 【】】】】】】】】】】】】】】】】】】】】】】】】】】】】
dH=∣(p~i−pj)∙∣(pl−pj)×(pm−pj)∣(pl−pj)×(pm−pj)∣【】】】】】】】】】】】】】】】】】】】】】】】】】】】】
2.3 位姿优化
根据非线性优化理论,只要求得残差关于待求变量的雅可比,便可采用高斯牛顿等进行优化。
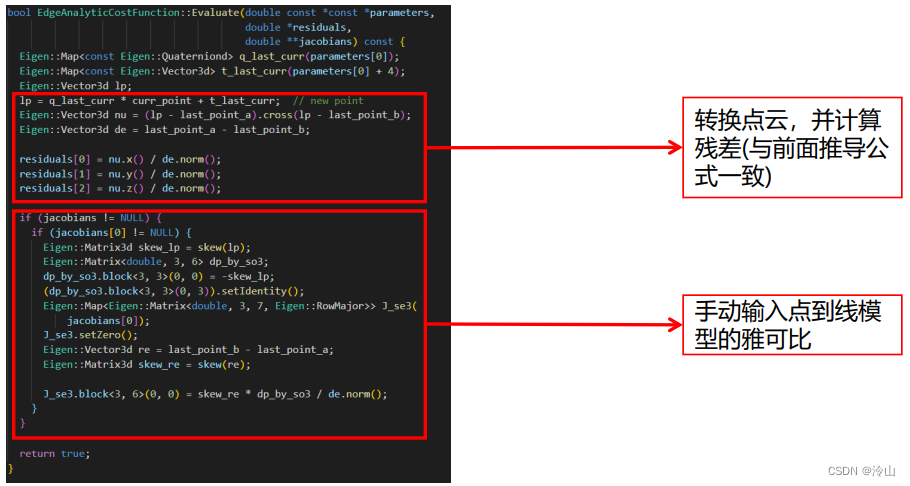
2.3.1 线特征残差雅可比
J ε = ∂ d ε ∂ T = ∂ d ε ∂ p ~ i ∂ p ~ i ∂ T J_{\varepsilon}=\frac{\partial d_{\varepsilon}}{\partial T}=\frac{\partial d_{\varepsilon}}{\partial \tilde{p}_i} \frac{\partial \tilde{p}_i}{\partial T} Jε=∂T∂dε=∂p~i∂dε∂T∂p~i ∂ d ε \partial d_{\varepsilon} ∂dε是残差,针对残差求导。 ∂ d ε ∂ T \frac{\partial d_{\varepsilon}}{\partial T} ∂T∂dε直接求导比较复杂,所以采用了链式求导法则。
等号右边第二项
∂
p
~
i
∂
T
\frac{\partial \tilde{p}_i}{\partial T}
∂T∂p~i与李代数相关,此处直接给出结论,推导过程见《视觉SLAM十四讲》第
4.3
4.3
4.3 节。
对平移的雅可比:
∂
p
~
i
∂
t
=
I
\frac{\partial \tilde{p}_i}{\partial t}=I
∂t∂p~i=I
对旋转的雅可比:
∂
p
~
i
∂
R
=
−
(
R
p
i
+
t
)
∧
\frac{\partial \tilde{p}_i}{\partial R}=-\left(R p_i+t\right)^{\wedge}
∂R∂p~i=−(Rpi+t)∧
等号右边第一项
∂
d
ε
∂
p
~
i
\frac{\partial d_{\varepsilon}}{\partial \tilde{p}_i}
∂p~i∂dε可以根据外积的微分性质,推导得到:
∂
d
ε
∂
p
~
i
=
1
∣
p
a
−
p
b
∣
(
∂
(
p
~
i
−
p
b
)
∧
(
p
~
i
−
p
a
)
∂
p
~
i
+
(
p
~
i
−
p
b
)
∧
∂
(
p
~
i
−
p
a
)
∂
p
~
i
)
=
1
∣
p
a
−
p
b
∣
(
−
(
p
~
i
−
p
a
)
∧
+
(
p
~
i
−
p
b
)
∧
)
=
(
p
a
−
p
b
)
∧
∣
p
a
−
p
b
∣
\begin{aligned} \frac{\partial d_{\varepsilon}}{\partial \tilde{p}_i} & =\frac{1}{\left|p_a-p_b\right|}\left(\frac{\partial\left(\tilde{p}_i-p_b\right)^{\wedge}\left(\tilde{p}_i-p_a\right)}{\partial \tilde{p}_i}+\frac{\left(\tilde{p}_i-p_b\right)^{\wedge} \partial\left(\tilde{p}_i-p_a\right)}{\partial \tilde{p}_i}\right) \\ & =\frac{1}{\left|p_a-p_b\right|}\left(-\left(\tilde{p}_i-p_a\right)^{\wedge}+\left(\tilde{p}_i-p_b\right)^{\wedge}\right) \\ & =\frac{\left(p_a-p_b\right)^{\wedge}}{\left|p_a-p_b\right|} \end{aligned}
∂p~i∂dε=∣pa−pb∣1(∂p~i∂(p~i−pb)∧(p~i−pa)+∂p~i(p~i−pb)∧∂(p~i−pa))=∣pa−pb∣1(−(p~i−pa)∧+(p~i−pb)∧)=∣pa−pb∣(pa−pb)∧
该式推导过程:
- 线特征点到直线距离: d E = ( p ~ i − p b ) × ( p ~ i − p a ) ∣ p a − p b ∣ d_{\mathcal{E}}=\frac{\left(\tilde{p}_i-p_b\right) \times\left(\tilde{p}_i-p_a\right)}{\left|p_a-p_b\right|} dE=∣pa−pb∣(p~i−pb)×(p~i−pa),上面可以变成 ( p ~ i − p b ) ∧ ( p ~ i − p a ) \left(\tilde{p}_i-p_b\right)^{\wedge}\left(\tilde{p}_i-p_a\right) (p~i−pb)∧(p~i−pa)
- 偏导有性质: ∂ x 1 x 2 ∂ y = ∂ x 1 ∂ y ⋅ x 2 + x 1 ⋅ ∂ x 2 ∂ y \frac{\partial x_1 x_2}{\partial y} = \frac{\partial x_1}{\partial y}\cdot x_2 + x_1\cdot \frac{\partial x_2}{\partial y} ∂y∂x1x2=∂y∂x1⋅x2+x1⋅∂y∂x2
- ∂ ( p ~ i − p b ) ∧ ( p ~ i − p a ) \partial\left(\tilde{p}_i-p_b\right)^{\wedge}\left(\tilde{p}_i-p_a\right) ∂(p~i−pb)∧(p~i−pa) 内 ∂ ( p ~ i − p b ) ∧ \partial\left(\tilde{p}_i-p_b\right)^{\wedge} ∂(p~i−pb)∧是个矩阵不好求偏导,这时使用另一个性质: a ∧ b = − b ∧ a a^{\wedge}b=-b^{\wedge}a a∧b=−b∧a又可推导出 ∂ a ∧ b ∂ a = − ∂ b ∧ a ∂ a = − b ∧ \frac{\partial a^{\wedge}b}{\partial a}=-\frac{\partial b^{\wedge}a}{\partial a}=-b^{\wedge} ∂a∂a∧b=−∂a∂b∧a=−b∧
- − ( p ~ i − p a ) ∧ + ( p ~ i − p b ) ∧ -\left(\tilde{p}_i-p_a\right)^{\wedge}+\left(\tilde{p}_i-p_b\right)^{\wedge} −(p~i−pa)∧+(p~i−pb)∧是矩阵,可以相互加减,抵消掉了 p ~ i \tilde{p}_i p~i,得到最终公式
2.3.2 面特征残差雅可比
J
H
=
∂
d
H
∂
T
=
∂
d
H
∂
p
~
i
∂
p
~
i
∂
T
J_{\mathcal{H}}=\frac{\partial d_{\mathcal{H}}}{\partial T}=\frac{\partial d_{\mathcal{H}}}{\partial \tilde{p}_i} \frac{\partial \tilde{p}_i}{\partial T}
JH=∂T∂dH=∂p~i∂dH∂T∂p~i等号右边第二项与线特征的一致。
残差函数为:
d
H
=
∣
(
p
~
i
−
p
j
)
∙
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
∣
d_{\mathcal{H}}=|\left(\tilde{p}_i-p_j\right) \bullet \frac{\left(p_l-p_j\right) \times\left(p_m-p_j\right)}{\left|\left(p_l-p_j\right) \times\left(p_m-p_j\right)\right|}|
dH=∣(p~i−pj)∙∣(pl−pj)×(pm−pj)∣(pl−pj)×(pm−pj)∣若令
X
=
(
p
~
i
−
p
j
)
∙
(
p
t
−
p
j
)
×
(
p
m
−
p
j
)
∣
(
p
t
−
p
j
)
×
(
p
m
−
p
j
)
∣
X=\left(\tilde{p}_i-p_j\right) \bullet \frac{\left(p_t-p_j\right) \times\left(p_m-p_j\right)}{\left|\left(p_t-p_j\right) \times\left(p_m-p_j\right)\right|}
X=(p~i−pj)∙∣(pt−pj)×(pm−pj)∣(pt−pj)×(pm−pj)则有
∂
d
H
∂
p
~
i
=
∂
∣
X
∣
∂
p
~
i
=
∂
∣
X
∣
∂
X
∂
X
∂
p
~
i
=
X
∣
X
∣
∂
X
∂
p
~
i
\frac{\partial d_{\mathcal{H}}}{\partial \tilde{p}_i}=\frac{\partial|X|}{\partial \tilde{p}_i}=\frac{\partial|X|}{\partial X} \frac{\partial X}{\partial \tilde{p}_i}=\frac{X}{|X|} \frac{\partial X}{\partial \tilde{p}_i}
∂p~i∂dH=∂p~i∂∣X∣=∂X∂∣X∣∂p~i∂X=∣X∣X∂p~i∂X关于
∂
∣
X
∣
∂
X
\frac{\partial|X|}{\partial X}
∂X∂∣X∣是怎么得到
X
∣
X
∣
\frac{X}{|X|}
∣X∣X的,假设
a
=
(
x
,
y
,
z
)
a=(x,y,z)
a=(x,y,z),那么
∂
∣
a
∣
∂
a
=
∂
x
2
+
y
2
+
z
2
∂
(
x
,
y
,
z
)
=
(
x
,
y
,
z
)
x
2
+
y
2
+
z
2
=
a
∣
a
∣
\frac{\partial|a|}{\partial a}=\frac{\partial \sqrt{x^2+y^2+z^2}}{\partial (x,y,z)}=\frac{(x,y,z)}{\sqrt{x^2+y^2+z^2}}=\frac{a}{|a|}
∂a∂∣a∣=∂(x,y,z)∂x2+y2+z2=x2+y2+z2(x,y,z)=∣a∣a
对于等号右边第二项,根据内积的微分性质,有
∂
X
∂
p
~
i
=
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
(
p
l
−
p
j
)
×
(
p
m
−
p
j
)
∣
\frac{\partial X}{\partial \tilde{p}_i}=\frac{\left(p_l-p_j\right) \times\left(p_m-p_j\right)}{\left|\left(p_l-p_j\right) \times\left(p_m-p_j\right)\right|}
∂p~i∂X=∣(pl−pj)×(pm−pj)∣(pl−pj)×(pm−pj)物理意义上,它代表的是平面的单位法向量。
3. 位姿代码实现
3.1 ceres 基础知识
3.1.1 基本概念
优化任务一般可以表示成如下形式:
min
x
1
2
∑
i
ρ
i
(
∥
f
i
(
x
i
1
,
…
,
x
i
k
)
∥
2
)
s.t.
l
j
≤
x
j
≤
u
j
\begin{aligned} & \min _{\mathbf{x}} \frac{1}{2} \sum_i \rho_i\left(\left\|f_i\left(x_{i_1}, \ldots, x_{i_k}\right)\right\|^2\right) \\ & \text { s.t. } \quad l_j \leq x_j \leq u_j \end{aligned}
xmin21i∑ρi(∥fi(xi1,…,xik)∥2) s.t. lj≤xj≤uj其中,
-
ρ
i
(
∥
f
i
(
x
i
1
,
…
,
x
i
k
)
∥
2
)
\rho_i\left(\left\|f_i\left(x_{i_1}, \ldots, x_{i_k}\right)\right\|^2\right)
ρi(∥fi(xi1,…,xik)∥2) 称为
残差块,即 ResidualBlock; -
f
i
(
⋅
)
f_i(\cdot)
fi(⋅) 称为
代价函数,对应之前讲的残差函数,即 CostFunction; -
[
x
i
1
,
…
,
x
i
k
]
\left[x_{i_1}, \ldots, x_{i_k}\right]
[xi1,…,xik] 这一系列参数称为
参数块(待优化参数),即 ParameterBlock; -
ρ
i
(
⋅
)
\rho_i(\cdot)
ρi(⋅) 称为
损失函数,即 LossFunction,对应之前的大F。
残差块ResidualBlock包含了代价函数(不止一个)、损失函数(可选)和待优化的参数块。
3.2 自动求导与解析求导
假设我们有一个残差,我们需要对残差求雅可比,如果将雅可比直接输到代码里,叫做解析求导,就是说已经解析式的,将求导的公式告诉算法了。自动求导是告诉代码残差和参数之间是什么关系,那么代码就可以自动的将雅可比求出来,不需要自己计算雅可比。
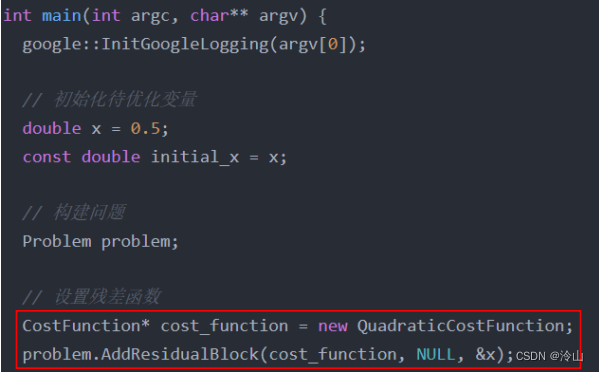
3.2.1 自动求导
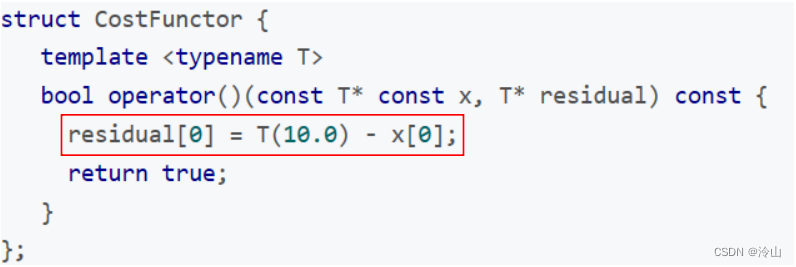
以一个简单的例子来说明该问题,假设代价函数为:
f
(
x
)
=
10
−
x
f(x)=10-x
f(x)=10−x
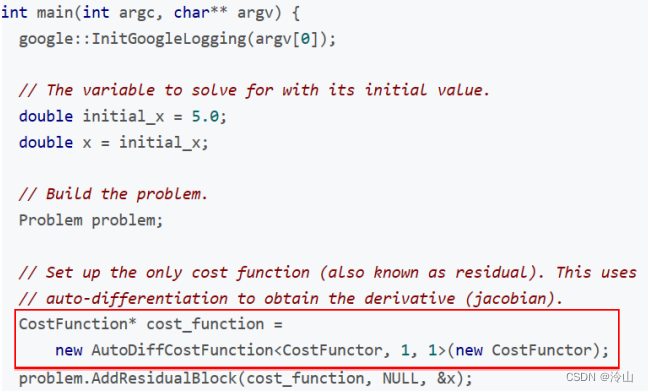
则首先编写 CostFunctor 的代码如下:
随后可直接构建 ceres 优化问题:
3.2.2 解析求导
解析求导的含义就是直接给出导数的解析形式,而不是ceres去推导。
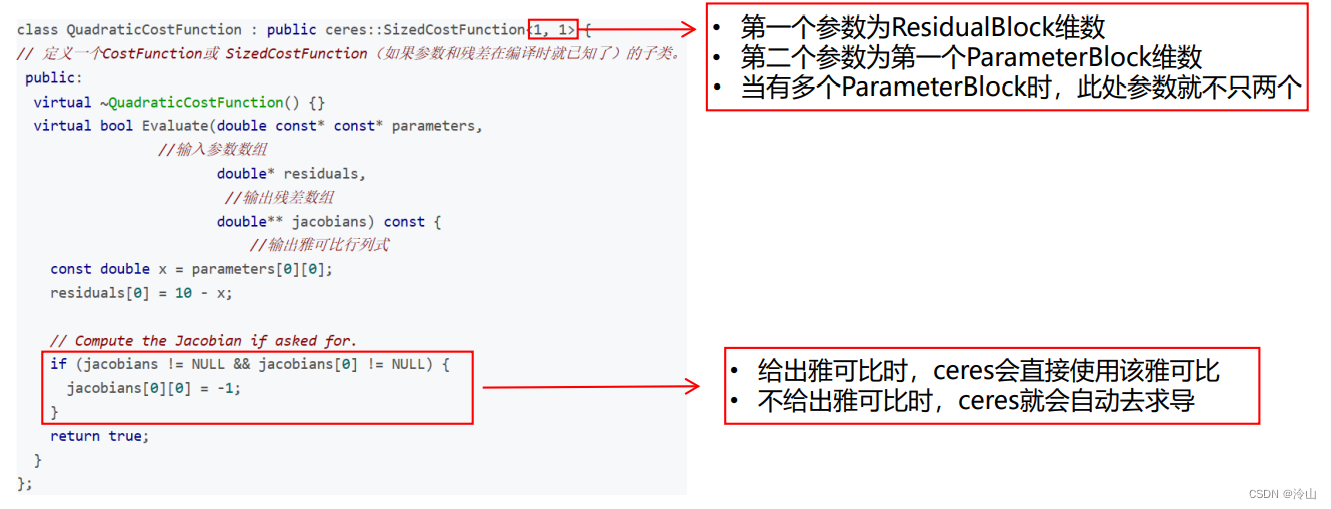
解析求导在没给出雅可比时,会转到自动求导上面去。
随后可构建优化问题:
这种使用方式,就是vio/lio中使用ceres构建优化问题的方式。
3.2.3 自动求导与解析求导的对比
• 自动求导实现方便,但效率会比解析求导低 (比较 A-LOAM 和 F-LOAM );
• 实际使用中,能够自动求导且效率没有形成障碍的,优先使用自动求导;
• 除这两种方法外,还有数值求导(SLAM问题中不常见,不过多介绍)
3.3 自动求导实现位姿优化(A-LOAM)
3.3.1 线特征
3.3.2 面特征
3.4 解析求导实现位姿优化(F-LOAM)
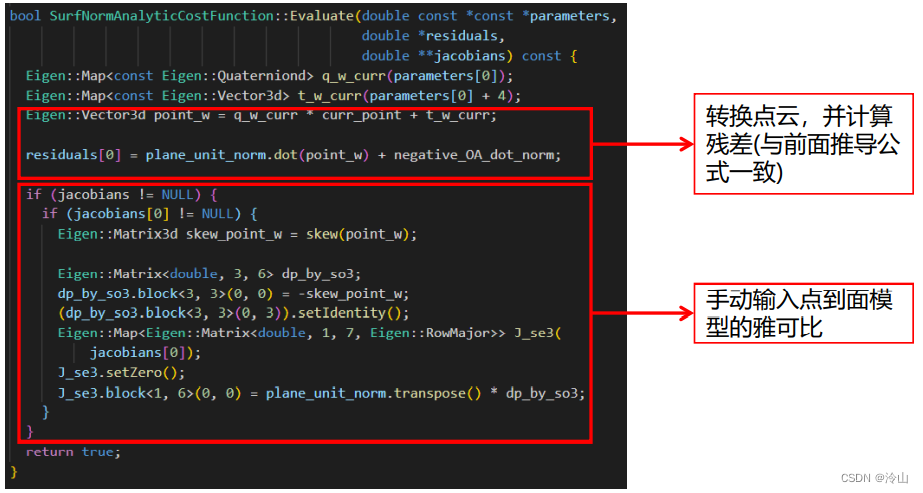
3.4.1 线特征
3.4.2 面特征
4. 相关开源里程计
4.1. 基于特征的里程计实现流程

帧到帧的方式,点云是比较稀疏的,会带来很多精度上的问题,比如:
- 上一帧打到树上了,这一帧没了;
- 上一帧和这一帧打到树上不同位置。
这时就引出了map的概念,也就是说,第 k + 1 k+1 k+1帧不是跟第 k k k帧,而是第 k k k帧之前的某些帧,共同构建出来了一个特征集合的map。不可能每一次都到map,map的运算量很大,那么实时性就没有意义了。这时就需要每个几帧再跟map匹配。这样累计误差也不会特别大,效率精度都能保证。
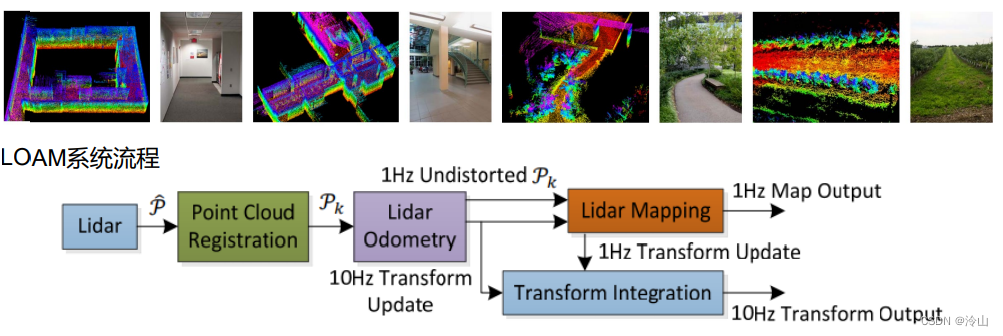
4.2 LOAM
LOAM: Lidar Odometry and Mapping in Real-time, Ji Zhang and Sanjiv Singh
代码比较乱,很多是没必要的操作。
4.3 A-LOAM
主要特点
- 去掉了和IMU相关的部分
- 使用Eigen(四元数)做位姿转换,简化了代码(将sin、cos去掉了)
- 使用ceres做迭代优化,简化了代码,但降低了效率(使用的自动求导)
4.4 F-LOAM
主要特点
- 整体和ALOAM类似,只是使用残差函数的雅可比使用的是解析式求导

![[附源码]Python计算机毕业设计Django校园代取快递系统](https://img-blog.csdnimg.cn/787b20d0e88b4659ba56dee315a12bc7.png)








![[附源码]计算机毕业设计Python仓储综合管理系统(程序+源码+LW文档)](https://img-blog.csdnimg.cn/000e30ce3be64f25b2de4c8d8bab8124.png)