文章目录
- ROS python 地图描点调试工具
- 1. Rviz描点
- 1.1 需求描述
- 1.2 visualization Marker
- 1.3 工程实践
- 2. 静态地图图片描点
- 2.1 需求描述
- 2.2 工程实践
ROS python 地图描点调试工具
1. Rviz描点
1.1 需求描述
在ROS开发中,有时会加载图片文件转为地图载入move_base,这个时候调试程序的时候会有像素坐标系到map坐标系的转换,需要确认自己的程序是否正确的达到了转换的目的,那么需要这样一个工具来描点,然后消除点,可以用Debug的方式逐步运行,保证绘点和消除点的效果正确性。
1.2 visualization Marker
visualization_msgs/Marker 是 ROS 中的一种消息类型,用于在可视化工具如 RViz 中描述可视化元素的属性,如点、线、箭头、文本等。它用于向 ROS 可视化工具发送信息以在可视化工具中呈现和显示这些元素。以下是 visualization_msgs/Marker 消息的主要字段:
header:标识可视化元素所在的坐标系。
ns:命名空间,用于将多个可视化元素进行分组或区分。
id:可视化元素的唯一标识符。
type:可视化元素的类型,例如点、线、箭头等。
action:描述对可视化元素的操作,如添加、修改或删除。
pose:描述可视化元素的位姿,通常包括位置和方向。
scale:可视化元素的尺寸或大小,具体含义取决于元素的类型。
color:可视化元素的颜色。
lifetime:可视化元素的生存时间,用于控制元素在可视化工具中的显示时间。
frame_locked:一个布尔值,指示可视化元素是否相对于特定坐标系固定。
visualization_msgs/Marker 消息的类型字段 type 决定了要呈现的可视化元素类型。常见的 type 包括:
Marker.POINTS:用于表示点云数据。
Marker.LINE_STRIP 和 Marker.LINE_LIST:用于表示线段。
Marker.ARROW:用于表示箭头。
Marker.CUBE 和 Marker.CYLINDER:用于表示立方体和圆柱体等形状。
Marker.TEXT_VIEW_FACING:用于表示面向视图的文本。
等等…
通过发布 visualization_msgs/Marker 消息,在 ROS 可视化工具中呈现和控制这些可视化元素的显示、修改和删除。这对于在机器人操作和感知任务中实时可视化数据非常有用。
visualization Marker action
| name | description |
|---|---|
| Marker.ADD | 添加新的Marker到场景中 |
| Marker.MODIFY | 修改已存在的Marker的属性,如位置、颜色等 |
| Marker.DELETE | 删除已存在的Marker,只有具有与该消息相同namespace和ID的可视化元素将被删除 |
| Marker.DELETEALL | rviz中添加了具有相同namespace和ID的多个Marker,并发布了一个带有Marker.DELETEALL操作的消息,那么所有这些Marker都将被删除。 |
1.3 工程实践
# -*-coding:utf-8-*-
# !/usr/bin/env python
# Author:Moresweet
# Date:20230907
# Blog:https://blog.csdn.net/qq_38853759?type=blog
import rospy
from rospy import Duration
from visualization_msgs.msg import Marker
from geometry_msgs.msg import Point
import json
def draw_markers_from_json_string(json_string):
rospy.init_node('rviz_marker_publisher')
marker_pub = rospy.Publisher('test_visual_point', Marker, queue_size=10)
# Load points from JSON string
points = json.loads(json_string)
# 消除点
marker = Marker()
marker.header.frame_id = "map" # Adjust the frame_id as needed
marker.type = Marker.POINTS
marker.action = Marker.ADD
marker.scale.x = 0.1 # Point size
marker.scale.y = 0.1
marker.color.r = 1.0 # Red
marker.color.a = 1.0 # Fully opaque
for point in points:
x = point["point"]["x"]
y = point["point"]["y"]
z = point["point"]["z"]
point = Point()
point.x = x
point.y = y
point.z = z
marker.points.append(point)
marker.header.stamp = rospy.Time.now()
marker_pub.publish(marker)
# rate = rospy.Rate(10) # 10 Hz
# while not rospy.is_shutdown():
# marker.header.stamp = rospy.Time.now()
# marker_pub.publish(marker)
# rate.sleep()
if __name__ == '__main__':
try:
json_string = '[{"point": {"x": 1.0, "y": 2.0, "z": 0.0}}, {"point": {"x": 3.0, "y": 4.0, "z": 0.0}}]' # Replace with your JSON string
draw_markers_from_json_string(json_string)
marker_pub = rospy.Publisher('/test_visual_point', Marker, queue_size=10)
marker = Marker()
marker.header.frame_id = "map"
marker.type = Marker.POINTS
marker.action = Marker.DELETE
marker.header.stamp = rospy.Time.now()
marker.lifetime = Duration(1.0)
marker_pub.publish(marker)
except rospy.ROSInterruptException:
pass
在rviz中添加Marker


设置话题
运行程序

以debug的形式,消除点
 点位消失
点位消失

2. 静态地图图片描点
2.1 需求描述
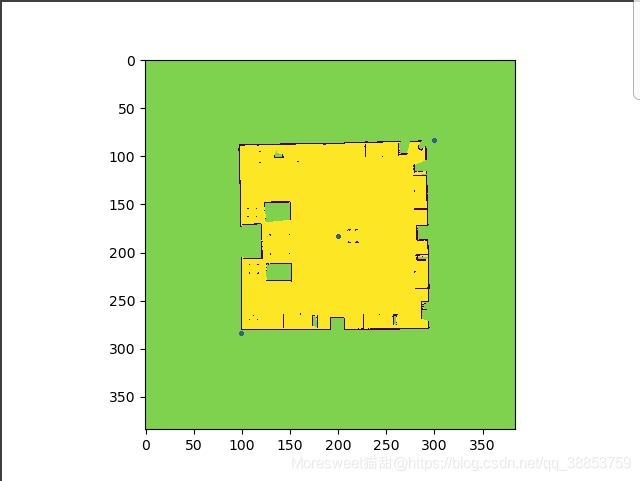
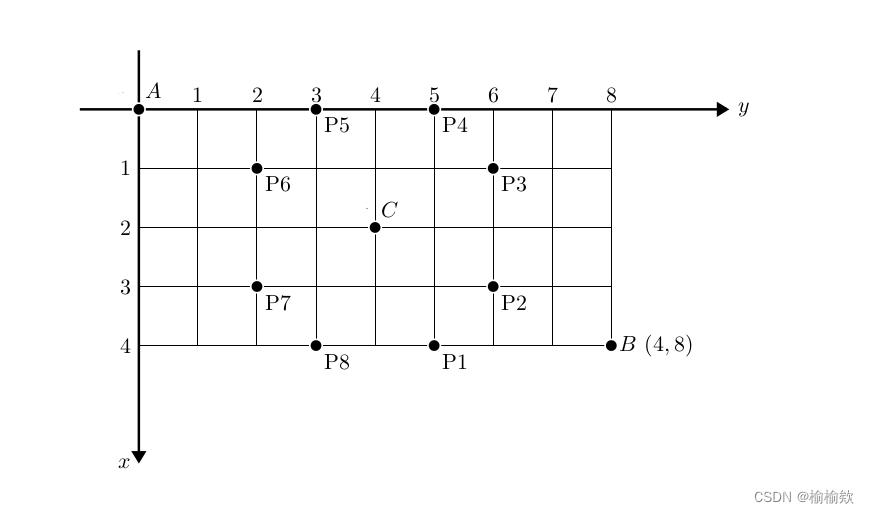
在图片格式的地图中,地图有自己的像素坐标系,对于转换关系在笔者之前的博客中已有提及。那么在map坐标系到像素坐标系的转换中,需要验证像素坐标系生成是否正确,这一点比较重要,像素坐标系的像素点表达了占据栅格信息。
2.2 工程实践
# -*-coding:utf-8-*-
# !/usr/bin/env python
# Author:Moresweet
# Date:20230907
# Blog:https://blog.csdn.net/qq_38853759?type=blog
import rospy
from rospy import Duration
from visualization_msgs.msg import Marker
from geometry_msgs.msg import Point
import json
def draw_markers_from_json_string(json_string):
rospy.init_node('rviz_marker_publisher')
marker_pub = rospy.Publisher('test_visual_point', Marker, queue_size=10)
# Load points from JSON string
points = json.loads(json_string)
# 消除点
marker = Marker()
marker.header.frame_id = "map" # Adjust the frame_id as needed
marker.type = Marker.POINTS
marker.action = Marker.ADD
marker.scale.x = 0.1 # Point size
marker.scale.y = 0.1
marker.color.r = 1.0 # Red
marker.color.a = 1.0 # Fully opaque
for point in points:
x = point["point"]["x"]
y = point["point"]["y"]
z = point["point"]["z"]
point = Point()
point.x = x
point.y = y
point.z = z
marker.points.append(point)
marker.header.stamp = rospy.Time.now()
marker_pub.publish(marker)
# rate = rospy.Rate(10) # 10 Hz
# while not rospy.is_shutdown():
# marker.header.stamp = rospy.Time.now()
# marker_pub.publish(marker)
# rate.sleep()
if __name__ == '__main__':
try:
json_string = '[{"point": {"x": 1.0, "y": 2.0, "z": 0.0}}, {"point": {"x": 3.0, "y": 4.0, "z": 0.0}}]' # Replace with your JSON string
draw_markers_from_json_string(json_string)
marker_pub = rospy.Publisher('/test_visual_point', Marker, queue_size=10)
marker = Marker()
marker.header.frame_id = "map"
marker.type = Marker.POINTS
marker.action = Marker.DELETE
marker.header.stamp = rospy.Time.now()
marker.lifetime = Duration(1.0)
marker_pub.publish(marker)
except rospy.ROSInterruptException:
pass