电容正负极角度测量
客户的需求
检测内容
电容的正负极角度测量。
检测要求
判断电容的正负极,无精度要求,速度越快越好。
凯瑞斯评估
视觉可行性分析
对贵司的样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉进行测试测量。
结果
对所有样品进行分析,可以在相同的光照与位置下测量出不同大小与高度的电容的正负极方向。
使用的LED光源、工业相机、工业镜头等硬件的具体信息,请参看下面的内容。
测试条件
产品测试时,视场留有一定的包容空间,但这不意味着产品不在视场内或部分在视场内里也能进行测量判断。原则上需要测试机台或流水线能将产品固定在相机视场内。
使用硬件
LED光源:CSR-7090-DRLB 1个……用于电极成像
光源控制器:CSR-24T2-APV 1个……用于光源供电
工业相机:AVT GUPPY F033B 1个……用于获取影像
相机电缆:3米1394A线 1条……用于传输影像
图像采集卡:1394图像采集卡 1块……用于采集影像
工业镜头:SV-3518 1个……用于光学成像
安装条件
检查方式如上图所示,目标(电容)从底下走过,利用传感器等进行触发,触发相机、光源进行拍照,然后图像处理系统进行图像处理,判断电容的方向。当然,实际的项目,需要对产品进行一定的定位。
光源工作距离:160~180mm,指光源到目标的距离
相机工作距离:280~300mm,指镜头表面到目标的距离
视场:42*31mm,指相机拍摄视场的大小(可见区域)
最优化方案
在这里,我们将告诉您,为什么选择这样的硬件,选择这些硬件的有什么好处。
LED光源 CSR-7090-DRLB
使用CSR-7090-DRLB光源,从上往下直射照射,电容的两极能够明显的区分开来,并且可以提供较大的工作距离,给镜头换来较大的景深。
光源控制器 CSR-24T2-APV
光源需要相应的供电设备,一般工业使用模拟控制器或数字控制器就足够了,在本方案中,因为电极是金属,属高反光物体,我们只需要较低的亮度即可达到要求,因此不需要使用频闪等控制器;而且只需要调整好亮度光圈后,不需要再更换亮度值,不需要电脑控制亮度,也就不需要使用数字控制器,因此我们使用模拟控制器,以减少硬件成本。
工业相机 AVT GUPPY F033B
AVT GUPPY F033B相机是一款德国进口30万像素的1394A工业CCD相机,其分辨率是656x494pix,我们的视野定为42x31mm,则我们的视觉精度可以达到42/656=0.064mm/Pix或31/494=0.063mm/Pix,有这样的精度,以电极的尺寸,完全可以判断出正负极及角度。而运动过程即使引起了拖影,对测试测量也不会造成太大的影响(当然是在运动速度并不是十分快的情况下,如果速度非常快,建议配合使用我们的频闪控制器,以提高光源亮度,从而使相机有更短的曝光时间)。
工业镜头 VST SV-3518
我们先了解一下什么是景深,在进行拍摄时,调节相机镜头对焦时,使距离相机一定距离的景物清晰成像的过程,叫做对焦,那个景物所在的点,称为对焦点,因为“清晰”并不是一种绝对的概念,所以,对焦点前、后一定距离内的景物的成像都可以是清晰的,这个前后范围的总和,就叫做景深,意思是只要在这个范围之内的景物,都能清楚地拍摄到。镜头使用的光圈越大,景深越小;光圈越小,景深越大。镜头的焦距越长,景深越小;焦距越短,景深越大;拍摄距离越远,景深越大;距离越近,景深越小。所以为了满足我们不同高度的电容都能在一个工作距离上能清晰成像,而不需要在不同的产品之间切换工作距离,我们需要使系统的景深尽量的大。我们选择SV-3518镜头,这款镜头是一款百万像素级低畸变工业镜头,通过景深计算器我们可以知道在使用上面的AVT相机时的景深为22.9mm(光圈为16,对焦距离300mm,CCD为1/3’),而我们的产品高度差为20mm,因此可以在一个对焦点上,对所有产品进行清晰成像,而不需要调整工作距离;因其低廉的价格,是我们判断电容正负极的首选产品。
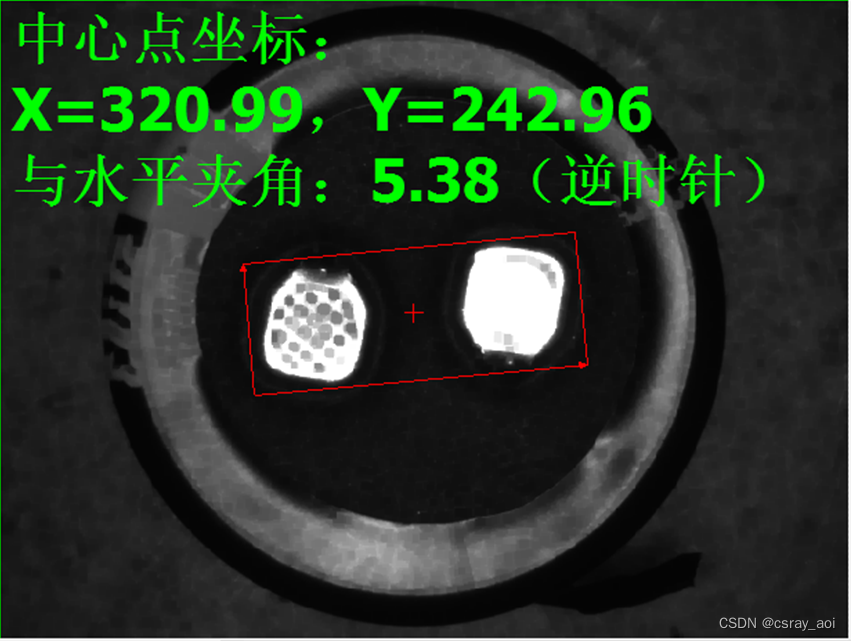
测试结果画面
产品的不同位置测试结果

设左边有凸点的电极为正极
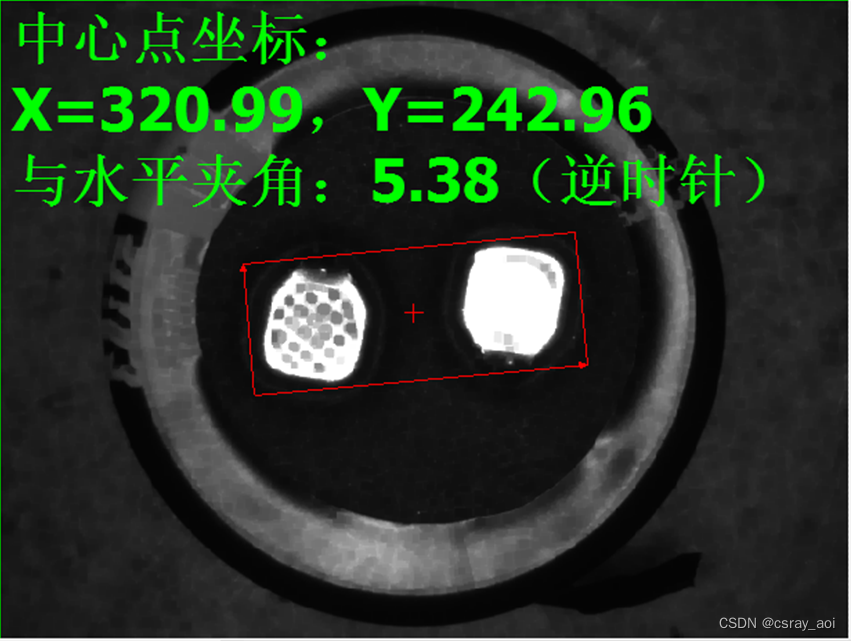


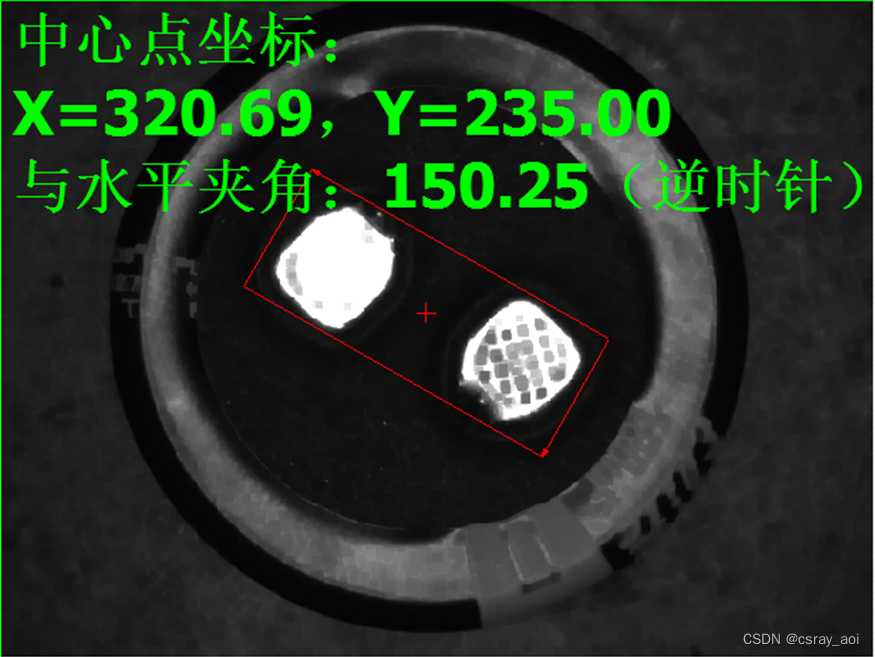
 以上为粗短产品不同位置方向判断
以上为粗短产品不同位置方向判断




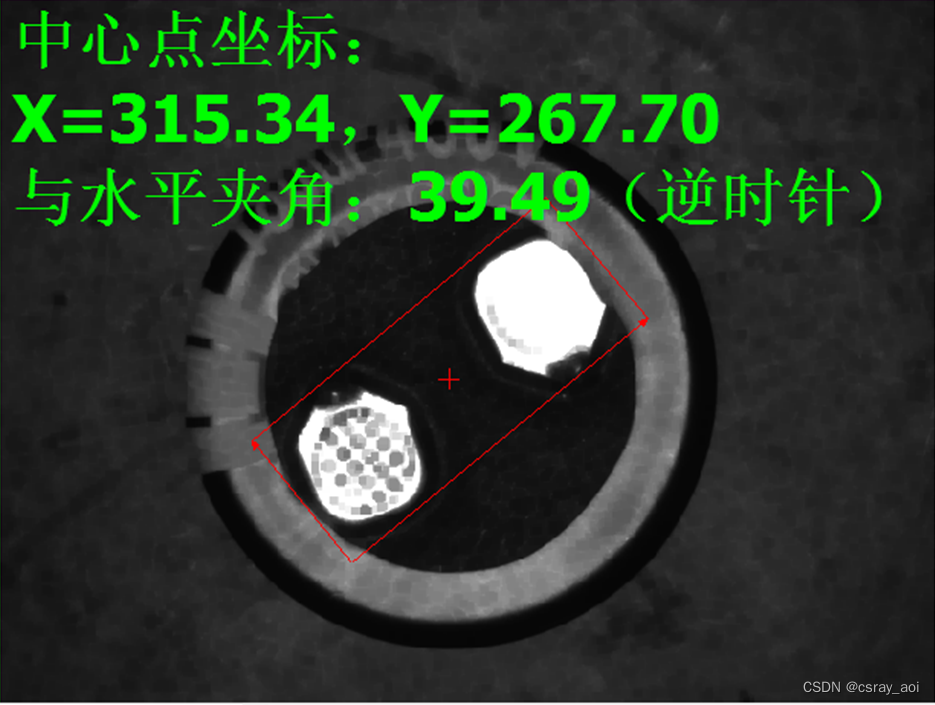
以上为粗短产品不同位置方向判断
同一产品,在不同位置下进行测量,可以发现只要正负极质心坐标的X不完全重合,我们就可以判断出左右哪边是正哪边是负,而且非常稳定,无误判。而在同样的照明、拍摄条件下,换另一个细长的产品,也一样可以判断出正负极,而不需要额外再调整机构的位置。
因此,使用我们这个方案,可以省去人工调整机构的麻烦,而且使用的硬件也是最高性价比的产品,在保证检测高效稳定的同时,也可以使客户更加省心,这可以说是行业最好的方案——没有之一。