文章目录
- 1. 控制理论简介
- 1.1 控制的作用
- 1.2 自动驾驶控制的目标
- 1.3自动驾驶控制器的设计
- 2. 汽车运动学与动力学
- 2.1 常用的自动驾驶控制算法
- 2.2 车辆运动学模型 Kinematics
- 2.3 车辆动力学模型 Dynamics
- 3. Apollo控制模块
- 3.1 Apollo控制模块
- 3.2 规划与控制相配合
- 3.3 Apollo控制模块的代码结构
- 3.3.1 代码文件与目录结构
- 3.3.2 如何创建和使用自己的控制器
- 4. 参数调节与分析工具
- 4.1 Apollo控制参数配置
- 4.2 Apollo控制分析工具
- 参考文献
1. 控制理论简介
1.1 控制的作用


1.环境感知:激光雷达(Lidar)、雷达(Radar)、超声波、视觉相机、惯导(IMU)等
2.高精度地图(HD Map):周围环境及地形的高精度建模(10cm左右的精度)0
3.控制规划及决策:对汽车进行智能控制
 思想实验:
思想实验:
- 可以睁开眼睛,但是换成更小的杯子
- 闭上眼睛,往杯子里面倒水,要求不能洒出来
- 如果眼睛是不能睁开的?找一个人在旁边指导,通过触觉系统感知,多试错几次
1.2 自动驾驶控制的目标

1.3自动驾驶控制器的设计

对于控制理论方面,如果想要进一步了解,可以参考胡寿松的《自动控制原理》这本书以及现代控制论的有关知识。
2. 汽车运动学与动力学
2.1 常用的自动驾驶控制算法

PID 控制无需基于模型。对于PID在车道保持方面的应用。自动驾驶之PID原理简述(简单易懂)
控制油门和刹车可以控制车的纵向速度和位移,而横向控制不仅依赖于车辆转向还依赖于横向速度.纵向控制与横向控制无法完全解耦。
2.2 车辆运动学模型 Kinematics
对于运动学与动力学的基本概念自动驾驶路径跟踪控制——车辆动力学建模基本概念这篇文章有所介绍。
 两轮车模型(自行车模型)自动驾驶路径跟踪控制——纯追踪控制之前这篇文章对自行车模型以及纯追踪控制有所介绍。
两轮车模型(自行车模型)自动驾驶路径跟踪控制——纯追踪控制之前这篇文章对自行车模型以及纯追踪控制有所介绍。
- 只考虑车辆的平面运动
- 左右车辆合并,不考虑转向时候左右轮子的转角差
o
o
o:车辆瞬心
z
z
z:车辆质心
R
R
R:转弯半径
β
β
β:速度与车辆纵轴的侧偏角(车身坐标系)
δ
δ
δ:车辆转角(车身坐标系)
ψ
ψ
ψ:车身横摆角(世界坐标系)
l
l
l:前后轮轴质心距
L
L
L:前后轮轴距
当车速比较慢时有
β
β
β→0,前轮转向
δ
f
{\delta _f}
δf→0

 只考虑运动学的缺点:
只考虑运动学的缺点:
- 实际情况下 β β β不一定为0
- 车辆速度方向不一定与轮胎方向一致
- 模型完全由几何关系确立,没有考虑
到运动过程中力的影响。
2.3 车辆动力学模型 Dynamics
二自由度侧向动力学模型
- 考虑轮胎侧偏特性(轮胎受力变形)
- 不考虑路面坡度影响
 当轮胎受到横向力时,轮胎由于形变产生侧滑。
当轮胎受到横向力时,轮胎由于形变产生侧滑。
F
y
=
C
θ
{F_y}={C\theta}
Fy=Cθ
C
C
C: 侧偏刚度(负值)
θ
θ
θ: 侧偏角(逆时针为正)


受力分析中,第一条式子是对力的平衡进行分析;第二条式子是对力矩的分析。
 根据角度关系可以得到下列关系式。
根据角度关系可以得到下列关系式。 根据上述公式,可以得到二自由度侧向动力学模型。
根据上述公式,可以得到二自由度侧向动力学模型。
缺点:
- 没有考虑坡度的影响(模型扩展:侧倾动力学模型)
- 侧偏角较大时,轮胎侧向力与侧偏角不成正比。
侧向力的大小取决于侧偏角,轮胎载荷,摩擦系数和轮胎纵向受力
该模型并不是这么精确。
3. Apollo控制模块
3.1 Apollo控制模块

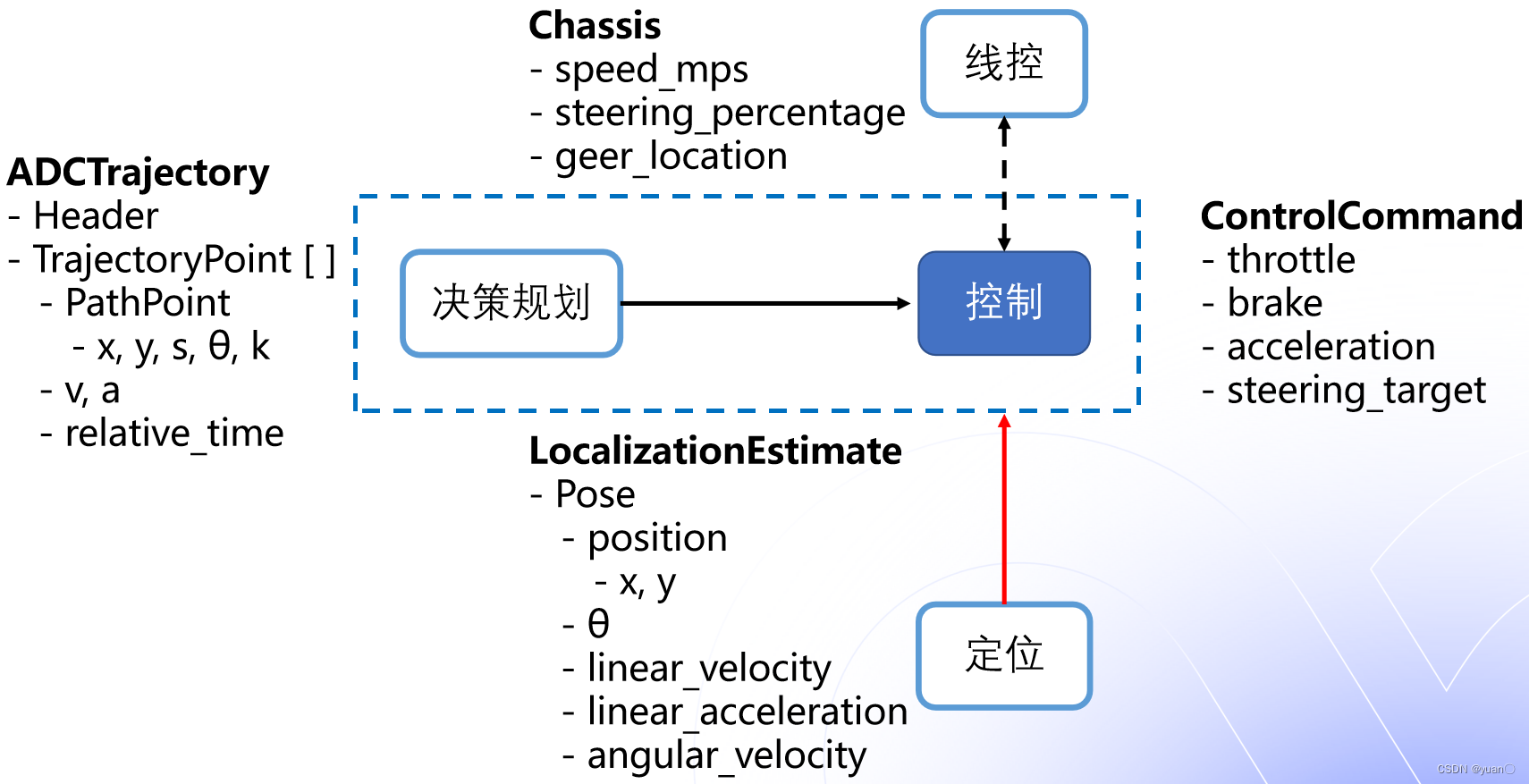
3.2 规划与控制相配合

3.3 Apollo控制模块的代码结构
3.3.1 代码文件与目录结构
/apollo/modules/control
- common (可复用的基础运算,包括差值计算,PID运算,超前滞后运算,轨迹分析计算等)
- conf (配置文件)
- controller (控制器,包括纵向控制器,横向控制器,MPC控制器)
- dag (CyberRT组件启动配置)
- proto
- submodules
- control_component (程序入口)
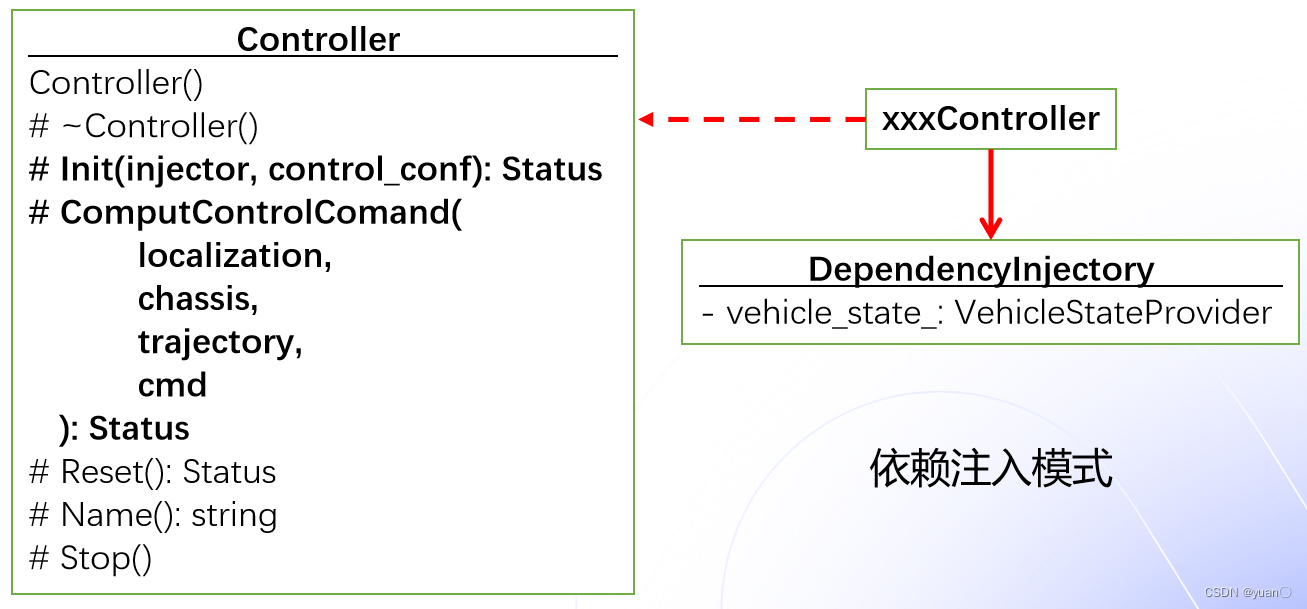
3.3.2 如何创建和使用自己的控制器
- 在/apollo/modules/control/controller文件夹中
创建控制器文件,继承controller.h,实现里面的接口
 2. 修改control_conf.proto文件,添加新的控制器名称
2. 修改control_conf.proto文件,添加新的控制器名称
enum ControllerType {
LAT_CONTROLLER = 0;
LON_CONTROLLER = 1;
MPC_CONTROLLER = 2;
XXX_CONTROLLER = 3;
}
- 在ControllerAgent中注册新的控制器
在ControllerAgent::RegisterControllers() 函数中添加
case ControlConf::XXX_CONTROLLER:
controller_factory_.Register(
ControlConf::XXX_CONTROLLER,
[]() -> Controller * { return new xxxController(); });
break;
- 修改control_conf.pb.txt配置文件
active_controllers: XXX_CONTROLLER

4. 参数调节与分析工具
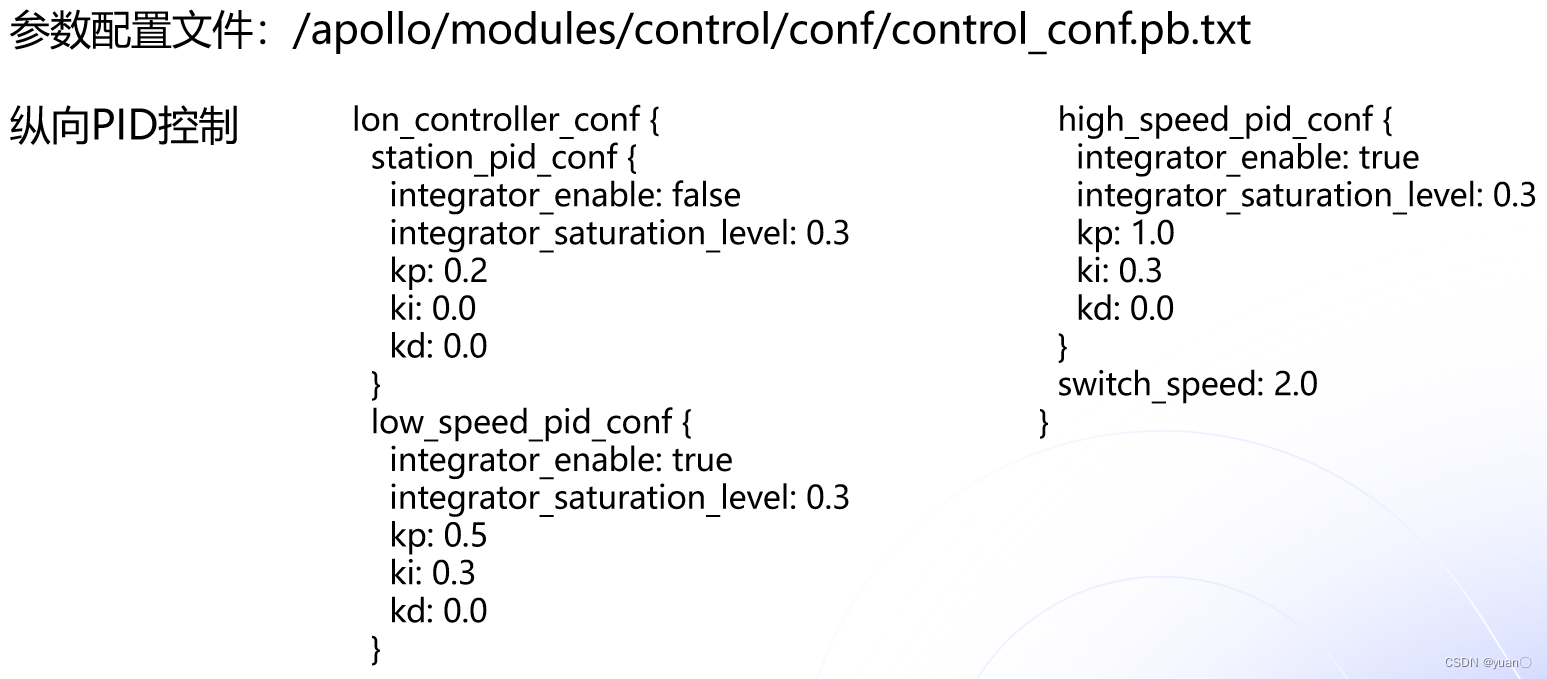
4.1 Apollo控制参数配置
 注意:
注意:
/apollo/modules/control/conf/control_conf.pb.txt 只是一个临时文件
配置文件改完记得保存到 /apollo/modules/calibration/ 对应的车辆文件夹中
(如:/apollo/modules/calibration/data/Lincoln2017MKZ_LGSVL/control_conf.pb.txt)
 在DreamView切换车辆的时候,DreamView会从选中的车辆文件夹中拿到实际的配置文件来覆盖临时文件.
在DreamView切换车辆的时候,DreamView会从选中的车辆文件夹中拿到实际的配置文件来覆盖临时文件.
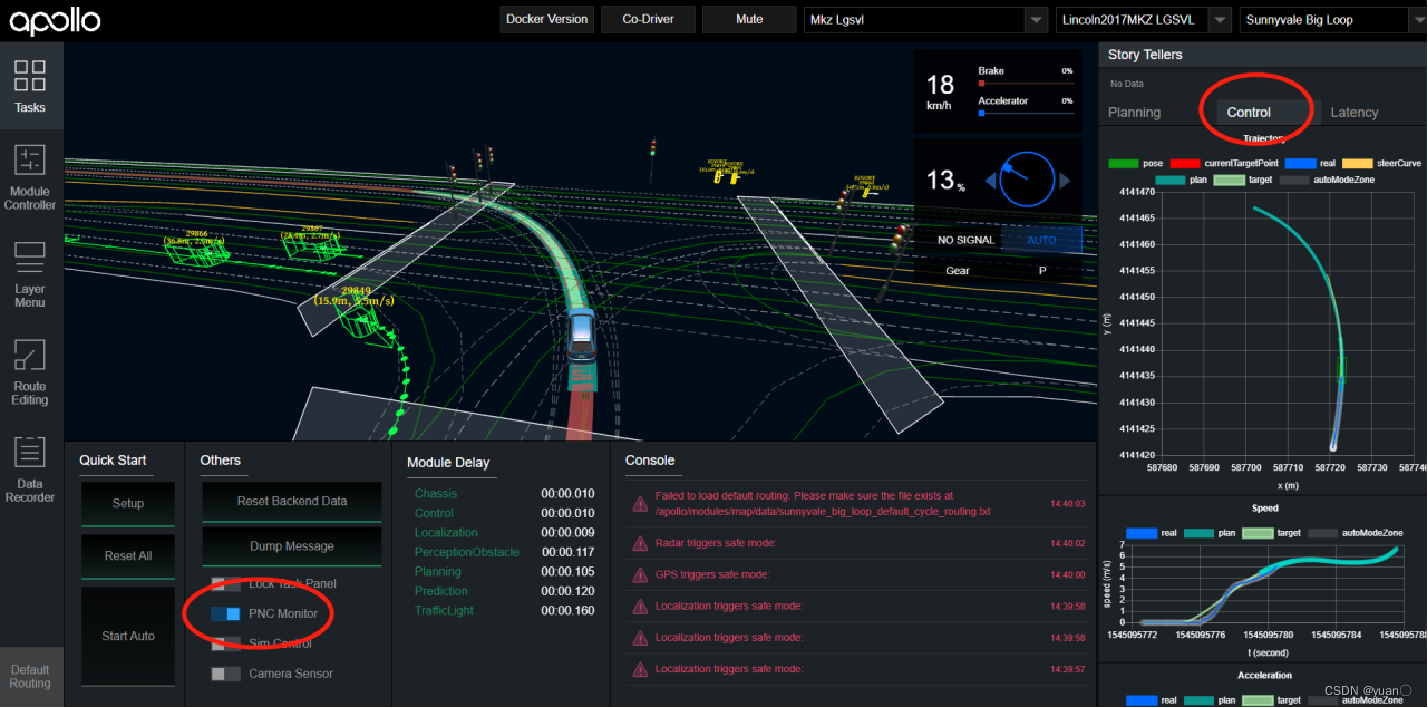
4.2 Apollo控制分析工具




离线分析:输出CSV文件
修改配置 /apollo/modules/control/conf/control_conf.conf
添加 --enable_csv_debug=true。
运行代码之后会生成两个csv文件。
/tmp/steer_log_simple_optimal_2022-xx-xx_xxxxxx.csv
/tmp/speed_log__2022-xx-xx_xxxxxx.csv
以protobuffer的方式输出到Channel中,然后Python进行数据分析,用Matplotlib做可视化。
- 创建一个节点实时监听Channel中的数据
参考代码
/apollo/modules/tools/plot_control/plot_control.py - 使用Cyber Recorder把数据录下来,然后使用Python解读


还可以使用python进行数据分析。
参考文献
《车辆动力学及控制》