前边两篇博文从距离和速度两个维度进行了介绍,本篇将沿着第三个维度,角度进行分析,这也是毫米波传感器原理介绍的最后一篇理论基础。还是老规矩,我们先把公式列出来。
- 假设雷达两个接收天线之间的距离为d,θ 是物体相对于雷达的达到角度,ω是两个接收天线中频信号的相位差,则有 ω = 2 π d s i n ( θ ) λ ω=\frac{2πdsin(θ)}{λ} ω=λ2πdsin(θ),导出 θ = s i n − 1 ( λ ω 2 π d ) θ=sin^{-1}(\frac{λω}{2πd}) θ=sin−1(2πdλω)
- 与速度模糊类似,两个中频信号的相位差也需要小于π,则有 2 π d s i n ( θ ) λ < π \frac{2πdsin(θ)}{λ}<π λ2πdsin(θ)<π,可得出最大到达角的公式 θ m a x = s i n − 1 ( λ 2 d ) θ_{max}=sin^{-1}(\frac{λ}{2d}) θmax=sin−1(2dλ)
- N为阵列天线的数量,则到达角分辨率 θ r e s = ( λ N d c o s ( θ ) ) θ_{res}=(\frac{λ}{Ndcos(θ)}) θres=(Ndcos(θ)λ),通常假设两个天线之间的距离为 λ 除以 2,并且 θ 为 0,则公式变为 θ r e s = ( 2 N ) θ_{res}=(\frac{2}{N}) θres=(N2)。
到达角测量基础
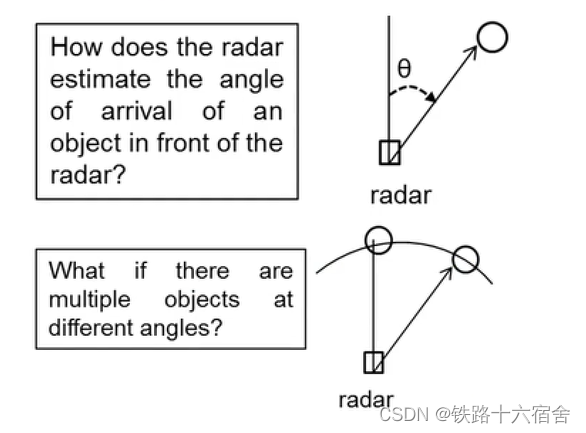
您有一个雷达,它前面有一个物体,雷达如何估算该物体的到达角?如果在不同的角度存在多个物体,但可能具有相同的距离和相同的相对速度,会怎么样?雷达的最大角度视场有哪些决定因素?雷达的角度分辨率取决于什么?这些问题我们都会在后续进行讨论。

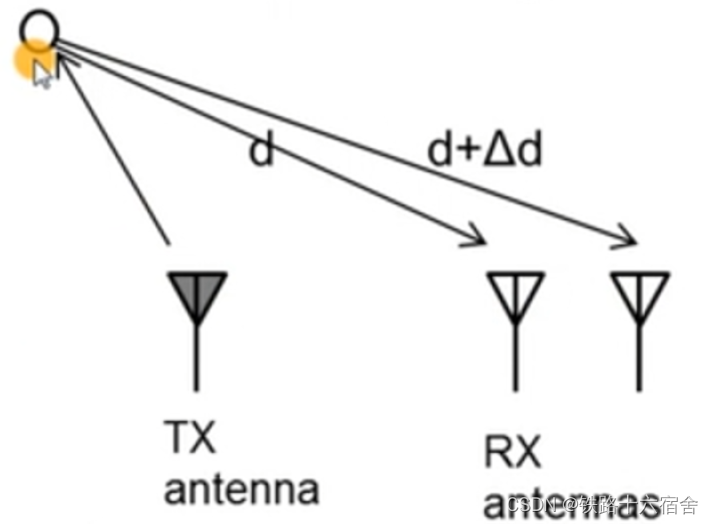
我们在讨论雷达测速原理时,得出一个重要的结论:中频信号的相位对物体的距离的微小变化十分敏感。具体而言,物体距离的微小变化 Δd 会导致相位变化 ω,其值为 4πΔd除以 λ。
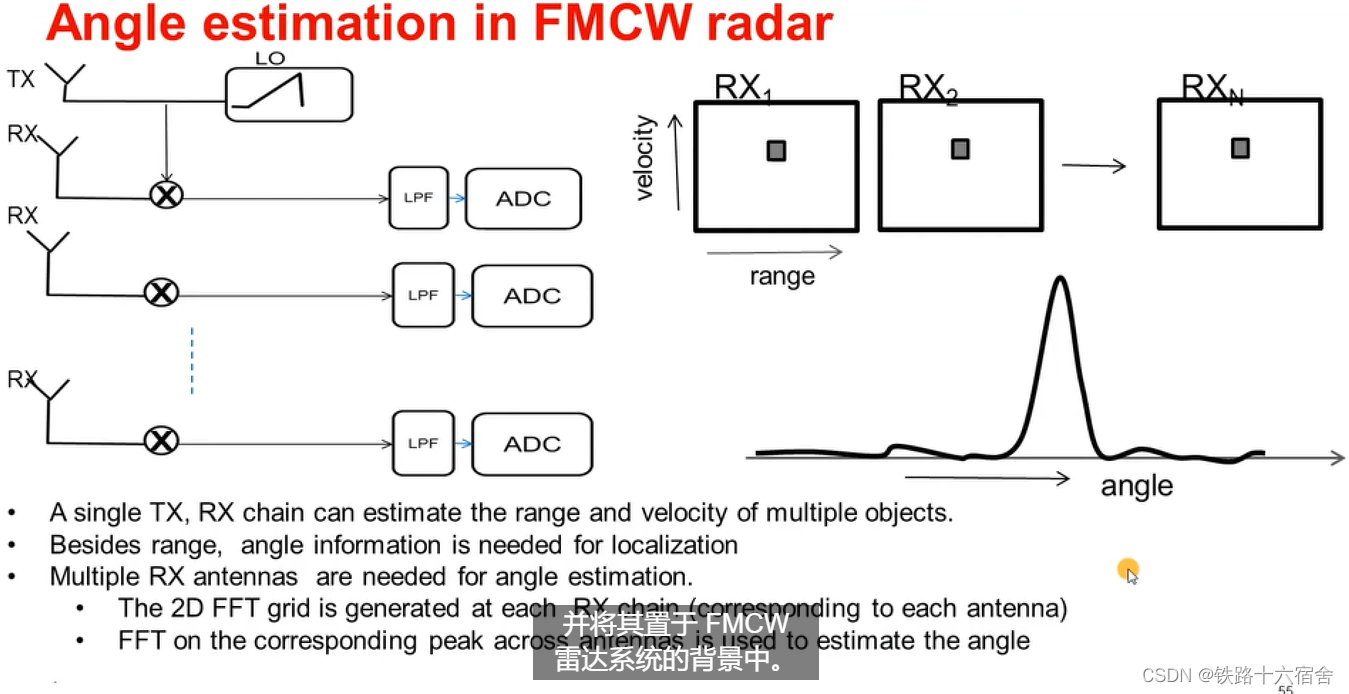
角度估算利用相同的原理,角度估算需要至少2个RX天线。这里是利用物体相对于雷达天线的距离差,过程如下图所示。由于接受天线之间存在一个距离,所以接收信号到达雷达不同天线的传播距离存在一个的差异
Δ
d
\Delta d
Δd,,则两个天线之间的中频信号的相位差为
ω
=
2
π
Δ
d
λ
ω=\frac{2π \Delta d}{λ}
ω=λ2πΔd,至于为什么分子的系数为2而不是4,那是因为只有发射回来的单程路径存在一个的距离差。
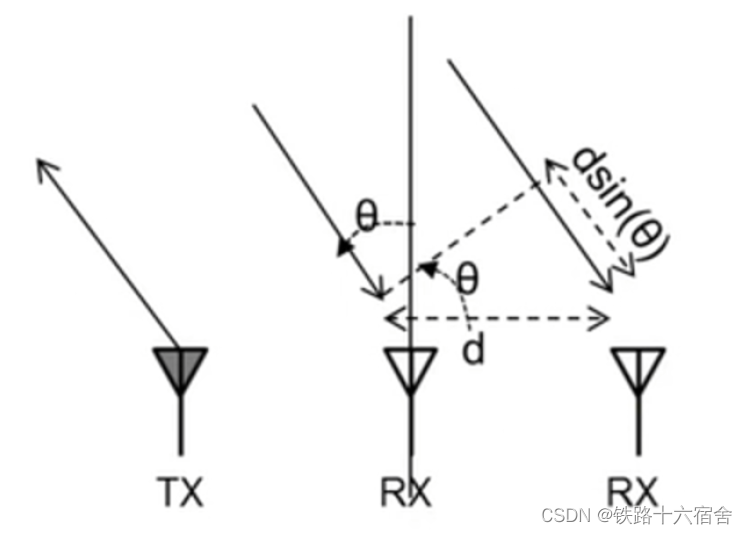
那这个距离和物体于雷达的角度存在什么样的关系?我们将雷达和物体的角度关系和变化的距离关系画出,如下图所示。在下图我们是假设雷达接收天线之间的距离为d,则接受信号到达雷达的两个接受天线的距离差公式为则有
ω
=
2
π
d
s
i
n
(
θ
)
λ
ω=\frac{2πdsin(θ)}{λ}
ω=λ2πdsin(θ),导出
θ
=
s
i
n
−
1
(
λ
ω
2
π
d
)
θ=sin^{-1}(\frac{λω}{2πd})
θ=sin−1(2πdλω)
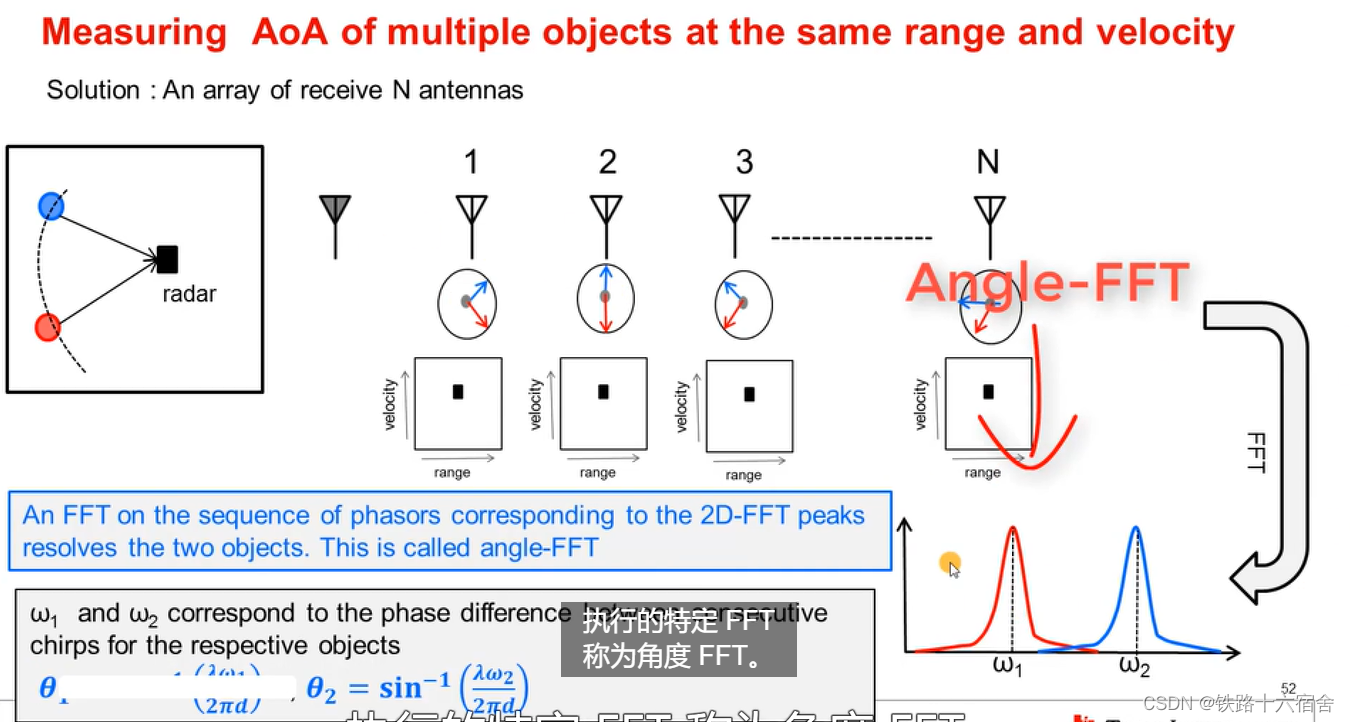
发射器天线发射一个线性调频脉冲帧,每个天线会接收该数据。每个天线会处理该数据,以创建一个 2D-FFT矩阵,其中包含与物体的距离和速度相对应的峰值。那么,两个接收天线,对应两个2D-FFT矩阵。请注意,两个2D-FFT峰值的位置几乎相同。这两个峰值之间的相位差将为2πdsin(θ),dsin(θ) 是额外的距离,然后除以 λ。您通过比较这两个信号,这两个峰值处的信号来测量该相位差之后,根据上面得到的公式,便可以计算到达角。
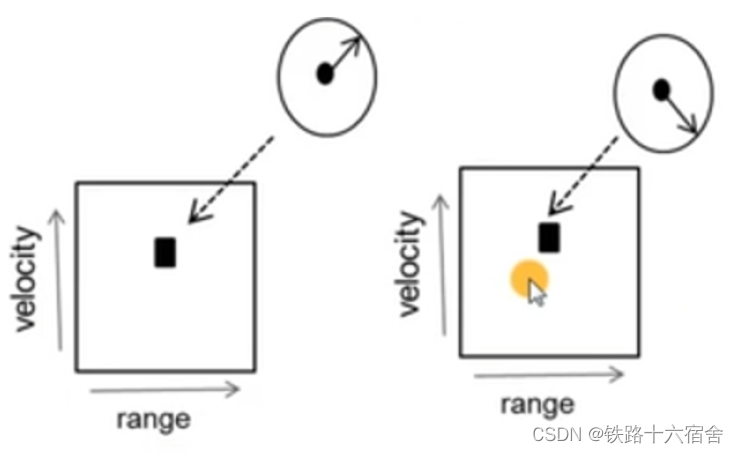
现在思考一个问题,如果在雷达前方存在两个物体,两个物体离雷达的距离相同并且速度也相同。上诉的方法还可以识别出两个物体的角度吗? 答案是否定的,对于两个天线而言,只能区分一个距离一个速度的上的一个物体角度,如果需要同一距离同一速度上的不同的角度则需要大于2的接收天线。如下图所示,为N个天线对应N个2D-FFT矩阵,然后做Angle-FFT来解出不同物体对应的ω。
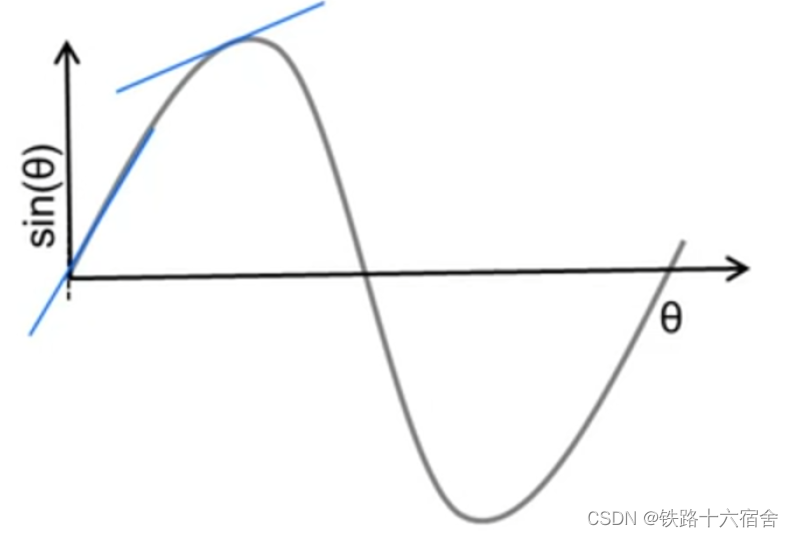
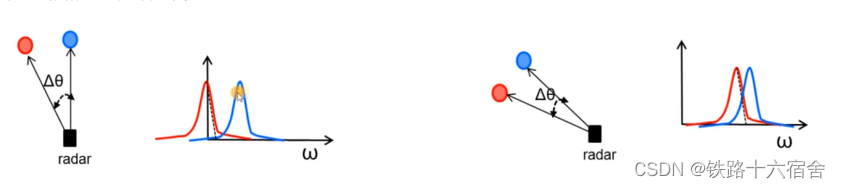
这里还有一个特性需要介绍一下,当物体在雷达正前方时,物体对雷达的角度测量效果十分好,但是当物体逐渐增加并且接近90°,当然由于噪声,估算角度的准确性会下降。 这是因为,根据公式
ω
=
2
π
Δ
d
λ
ω=\frac{2π\Delta d}{λ}
ω=λ2πΔd,两个天线的对应谱峰的相位差和物体的雷达不是线性关系,ω和θ的关系如下图所示,在θ接近于0时,sin(θ)对θ十分的敏感,而θ接近90°时,sin(θ)对θ的变化非常不敏感。
最大视场以及角度分辨率
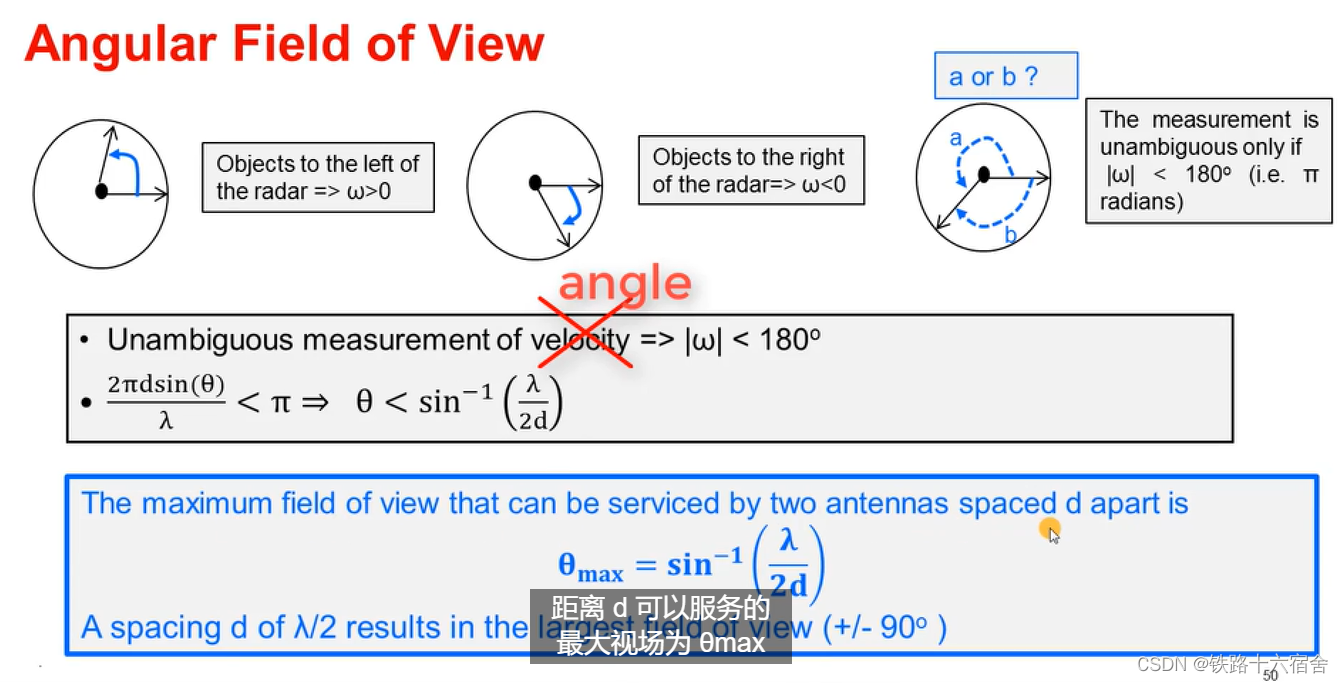
当我们讨论速度估算时,我们看到雷达能够不模糊测量的速度具有上限。我们将此称为雷达的最大速度。雷达可以测量的最大不模糊角度是否存在类似的限制?,基本而言,速度的不模糊测量要求两个天线之间的相位变化小于 180 度。如下图所示,角度有类似的结论。我们看到雷达可以测量的最大角度必须小于λ 除以 2d 的反正弦,其中 d 是两个天线之间的距离。所以,我们可以得出最大视场,两个天线之间的距离 d 可以服务的最大视场为
θ
m
a
x
θ_{max}
θmax等于 λ 除以2d 的反正弦。请注意,在两个天线之间的距离如果为λ 除以2,可导致最大的可能视场正 90 度或负 90 度。
角度分辨率的定义:两个物体的到达角分别位于θ和θ+Δθ,那么当两个物体的角度差差异多少时,可以将两个物体的角度在角度FFT的谱峰中区分的出来,这就是角度分辨率的定义。
假设到达角θ为的物体具有离散频率ω,它为
2
π
d
s
i
n
(
θ
)
λ
\frac{2πdsin(θ)}{λ}
λ2πdsin(θ),又因为FFT区分ω需要满足
ω
>
2
π
N
ω>\frac{2π}{N}
ω>N2π,N为FFT中的采样的样本数,所以我们可以进行如下的推导。
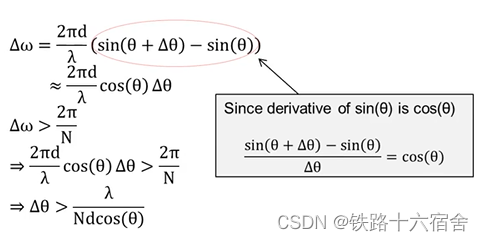
其中N是天线的数量,d是两个连续天线之间的距离,所以在上面的推导的公式可以得到
θ
r
e
s
=
(
λ
N
d
c
o
s
(
θ
)
)
θ_{res}=(\frac{λ}{Ndcos(θ)})
θres=(Ndcos(θ)λ),通常假设两个天线之间的距离为 λ 除以 2,并且 θ 为 0,则公式变为
θ
r
e
s
=
(
2
N
)
θ_{res}=(\frac{2}{N})
θres=(N2)。,需要注意的一点是,这里的单位是弧度制。
如果您看看该表达式,有一点很有意思,即分辨率角度取决于 θ。这在距离或速度背景中未出现过。因此距离和速度分辨率都独立于实际的距离和速度值。其原因还是在于 sin(θ) 的不一致特性。因此,对于由 Δθ分隔的两个物体,其在角度 FFT 中的角频率在 θ 等于0 时实际上离得更远,并且随着 θ 的增大彼此越来越靠近,即使在两种情况下距离Δθ 相同也是如此。
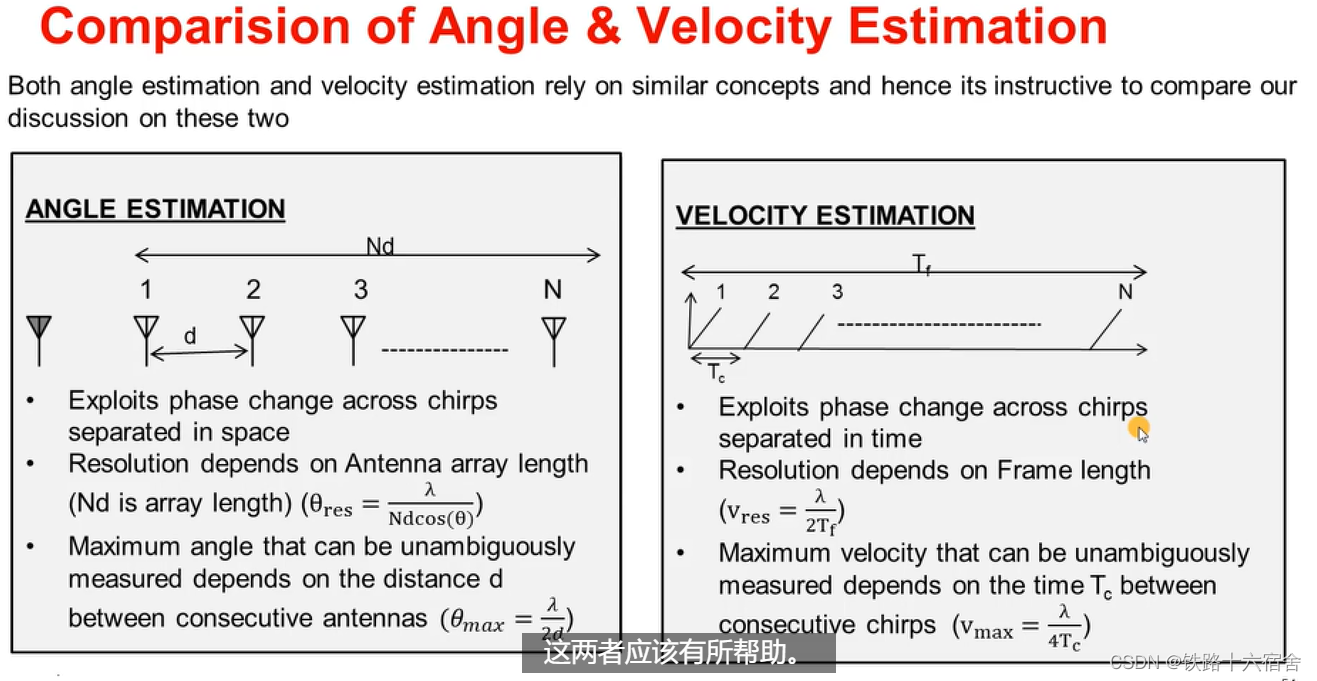
正如您现在可能已经了解的那样,FMCW 雷达中的角度估算和速度估算取决于非常类似的概念。实际上,数学基础几乎是相同的。因此,我认为通过下图来比较这两者应该有所帮助。详细的对比关系在下图均已说明,这里不再赘述了。
最后,我们在完整的回顾一下角度估计的流程。首先,您具有合成器synth,也称为 LO 或本机振荡器,它可以生成线性调频脉冲。线性调频脉冲由发射天线进行发射。它从雷达前方的物体上进行反射。在每个接收天线处接收反射信号。synth 信号路由到其中的每个 RX天线,接收到的信号与 synth 信号混合,以创建 IF 信号。IF 信号经过低通滤波器,并由 ADC 进行采样。该ADC 数据在整个帧发生中进行处理,以创建一个 2D-FFT 网格,针对每个 RX 天线创建一个此类 2D-FFT 网格。该 2D-FFT 网格中的峰值与物体的距离和速度相对应。针对单一TX天线的所有RX天线的2D-FFT 中对应峰值进行的FFT称为角度 FFT,该角度 FFT中的峰值直接对应于物体的到达角。