PWM驱动
- PWM介绍
- TIM_OC1Init 配置通道
- TIM_OCStructInit 输出比较参数默认值
- 输出比较模式 TIM_OCInitstructure
- 输出比较极性 TIM_OCInitstructure
- 设置输出使能
- 以下三个决定了PWM的频率 占空比
- 初始化通道 TIM_OC1Init(TIM2, &TIM_OCInitstructure);
- GPIO复用 PWM通道
- 驱动LED
- 复用推挽输出
- 驱动舵机
- 驱动直流电机
PWM介绍
每个定时器有四个通道,每一个通道都有一个捕获比较寄存器,
将寄存器值和计数器值比较,通过比较结果输出高低电平,实现PWM信号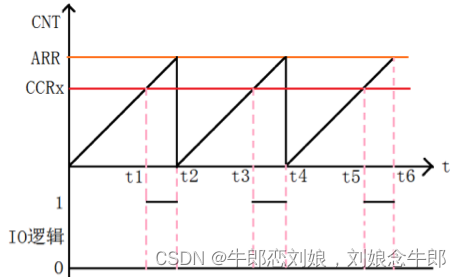
如图为向上计数:
定时器重装载值为ARR,比较值CCRx
t时刻对计数器值和比较值进行比较
如果计数器值小于CCRx值,输出低电平
如果计数器值大于CCRx值,输出高电平
PWM的一个周期
定时器从0开始向上计数
当0-t1段,定时器计数器TIMx_CNT值小于CCRx值,输出低电平
t1-t2段,定时器计数器TIMx_CNT值大于CCRx值,输出高电平
当TIMx_CNT值达到ARR时,定时器溢出,重新向上计数...循环此过程
至此一个PWM周期完成
影响因素
ARR : 决定PWM周期(在时钟频率一定的情况下,当前为默认内部时钟CK_INT)
CCRx : 决定PWM占空比(高低电平所占整个周期比例)
TIM_OC1Init 配置通道
配置比较函数 一个函数配置一个单元
参数1 定时器 参数2 输出比较参数 ******
void TIM_OC1Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC2Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC3Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
void TIM_OC4Init(TIM_TypeDef* TIMx, TIM_OCInitTypeDef* TIM_OCInitStruct);
TIM_OCStructInit 输出比较参数默认值
输出比较参数默认值
void TIM_OCStructInit(TIM_OCInitTypeDef* TIM_OCInitStruct);
用来配置强制输出模式 = 100%占空比
void TIM_ForcedOC1Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC2Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC3Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
void TIM_ForcedOC4Config(TIM_TypeDef* TIMx, uint16_t TIM_ForcedAction);
用来配置CCR寄存器预装功能
void TIM_OC1PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC2PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC3PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
void TIM_OC4PreloadConfig(TIM_TypeDef* TIMx, uint16_t TIM_OCPreload);
用来单独修改CCR寄存器值的函数(更改占空比)****
void TIM_SetCompare1(TIM_TypeDef* TIMx, uint16_t Compare1);
void TIM_SetCompare2(TIM_TypeDef* TIMx, uint16_t Compare2);
void TIM_SetCompare3(TIM_TypeDef* TIMx, uint16_t Compare3);
void TIM_SetCompare4(TIM_TypeDef* TIMx, uint16_t Compare4);
再补充说明一下这个函数仅高级定时器使用在使用高级定时器输出PWM时需要调用这个函数使能主输出否则PWM将不能正常输出
void TIM_CtrlPWMOutputs(TIM_TypeDef* TIMx, FunctionalState NewState);
输出比较模式 TIM_OCInitstructure
TIM_OCInitstructure.TIM_OCMode = TIM_OCMode_PWM1;
1 冻结模式
2 相等时置有效电平
3 相等时置无效电平
4 相等时电平反转
5 6 pwm1 pwm2

输出比较极性 TIM_OCInitstructure
TIM_OCInitstructure.TIM_OCPolarity = ;

1高极性 极性不反转 REF波形直接输出 REF有效时 输出高电平
2 REF有效时 输出低电平
设置输出使能
TIM_OCInitstructure.TIM_OutputNState = TIM_OutputNState_Enable;
以下三个决定了PWM的频率 占空比
TIM_TimeBaseInitStructure.TIM_Period = 10000 - 1; //ARR in时基
TIM_TimeBaseInitStructure.TIM_Prescaler = 7200 - 1; //PSC in 时基
TIM_OCInitstructure.TIM_Pulse = ; //CCR 0000~FFFF

初始化通道 TIM_OC1Init(TIM2, &TIM_OCInitstructure);
GPIO复用 PWM通道

驱动LED
复用推挽输出
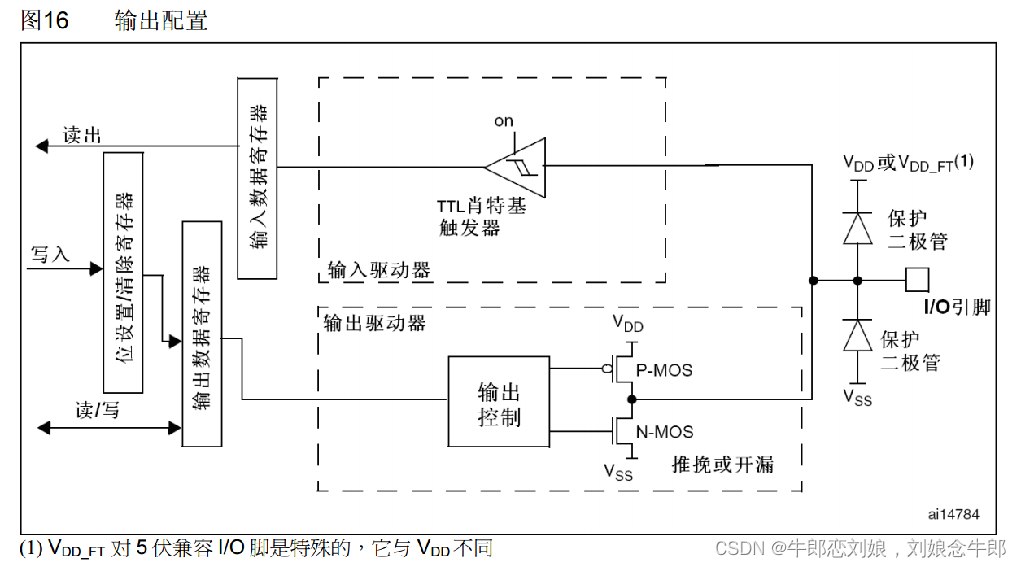
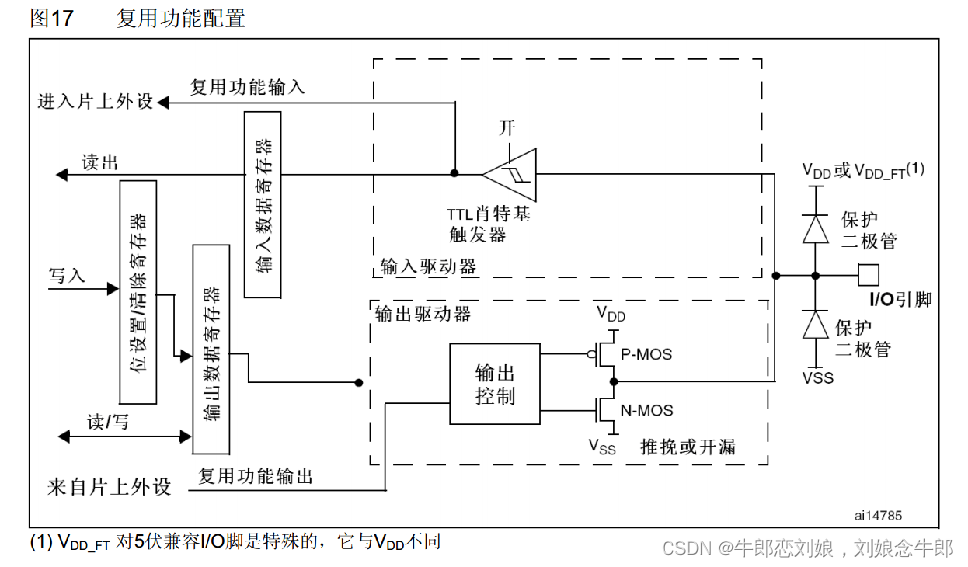
我们可以看到 pa0的控制权 由输出数据寄存器 跳转到了片上外设
所以 PA0的输出模式改为复用输出
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
分辨率1% 频率1k 占空比 50% 由公式可得
ARR = 100 - 1
CCR = 50
PSC = 720 - 1
后期可以调 CCR 来控制占空比
0 - 100 分别代表占空比 0 - 100 %
#include "stm32f10x.h" // Device header
void PWM_Init(void)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //打开时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
// RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE);
// GPIO_PinRemapConfig(GPIO_PartialRemap1_TIM2, ENABLE);
// GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable, ENABLE);
GPIO_InitTypeDef GPIO_InitStructure;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出 控制权来自于定时器
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //GPIO_Pin_15;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
TIM_InternalClockConfig(TIM2); //选择内部时钟
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //初始化时基单元
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1;
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInitStructure.TIM_Period = 100 - 1; //ARR
TIM_TimeBaseInitStructure.TIM_Prescaler = 720 - 1; //PSC
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0;
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure);
TIM_OCInitTypeDef TIM_OCInitStructure;//配置输出比较单元
TIM_OCStructInit(&TIM_OCInitStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = 50; //CCR
TIM_OC1Init(TIM2, &TIM_OCInitStructure);
TIM_Cmd(TIM2, ENABLE);//启动定时器
}
void pwm_setcompare1(uint16_t Compare) //实时修改CRR 用来控制PWM占空比
{
TIM_SetCompare1(TIM2, Compare);
}
驱动舵机
驱动舵机不免驱动一个,多数情况下会驱动多个
那么一个定时器应该如何驱动多个舵机呢
我们可以开通多个通道


占空比要求一般 0.5ms - 2.5 ms
ARR+1 = 20k
PSC + 1 = 72
CRR = 500 -2500
这里通道设置为2 GPIOA pin2
初始化代码基本不变
main如下
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "sevo.h"
uint16_t i;
float angle=0;
int main(void)
{
OLED_Init();//Apin 14 15
sevo_init();//TIM2 ͨµÀ2 PA1
while (1)
{
if(angle>180) angle=0;
sevoangle(angle);
OLED_ShowNum(1,1,angle,3);//
angle+=30;
Delay_ms(1000);
}
}
sevo.c如下
#include "stm32f10x.h" // Device header
#include "pwm.h"
void sevo_init(void){
PWM_Init();
}
void sevoangle(float angle){
angle=angle/180 * 2000 + 500;
TIM_SetCompare2(TIM2, angle);
}
实现了1s钟 舵机旋转30度
舵机接口
1. 5V电压
2. PWM通道2 这里接PA1 TIM2 通道 2
3. GND
驱动直流电机

频率越快 蜂鸣器杂音越小 20kHZ psc=32 预分频器= 32
72M / 32 = 20KHZ
CCR = -100 ~ +100 反转 和 正转
由于设备不齐全 只能理论以下了
VM 5v
VCC 3.3v
GND
AO1 正极
AO2 负极
PWMA 接A2 使用的TIM2 通道3
AIN2 GPIO A5
AIN1 GPIO A4
正传 A4=1 A5=0
反转 相反
STBY 3.3v
CCR用来控制速度
0-100
但我们输入参数的时候是-100 ~ +100 这是因为我们要区分正传还是反转
如果为负数 我们就A4=0 A5=1 反之 相反
如果为负值 我们需要取绝对值 否则CCR会错误
留个作业
旋转编码器来控制舵机 留在这