导读:针对低通滤波环节替换电压模型纯积分环节加反馈补偿的改进方法,磁链估计仍然存在幅值和相位误差的问题,本期文章介绍采用LPF串联HPF替换纯积分环节,然后基于时间向量分析的稳态补偿策略来对电压模型进行改进。仿真结果表明,新介绍的改进方法使磁链估计精度有了很大的提升。
如果需要文章中的仿真模型,关注微信公众号:浅谈电机控制,留言获取。
一、原理介绍

图1-1 改进型电压模型磁链观测器控制框图
使用电压模型时,低速时磁链观测精度主要受到定子电阻变化和直流偏置的影响,前者可以通过在线调整定子电阻的参数降低影响。对于使用纯积分的电压模型磁链观测器,磁链的直流偏置主要由反电势含有的直流偏置和初值误差引起的。常用的方法是使用LPF来替代纯积分环节。这种方法能够消除初值误差,却不能完全消除直流偏置,而且LPF会带来额外的幅值和相位误差,也在很大程度上影响了磁链观测器的精度。
本节在已有的方法基础上,实现一种使用低通滤波器(LPF)和高通滤波器(HPF)串联替代纯积分求解定子磁链的方法,更有效地消除了初值误差和直流偏置的影响,并利用时间相量分析的方法,推出稳态误差的补偿公式,实现了磁链观测零偏置和稳态无误差。该方法简单明了,易于在数字系统中实现。
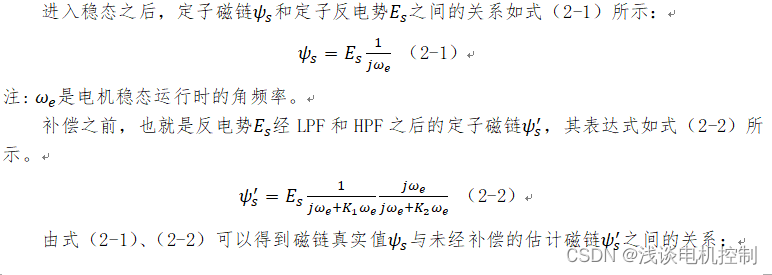
二、基于时间向量分析的稳态补偿策略


三、仿真搭建和仿真波形分析

图3-1 基于电压型磁链观测器的异步电机矢量控制框图

图3-2 LPF替换纯积分环节+反馈补偿的改进方法波形变换情况
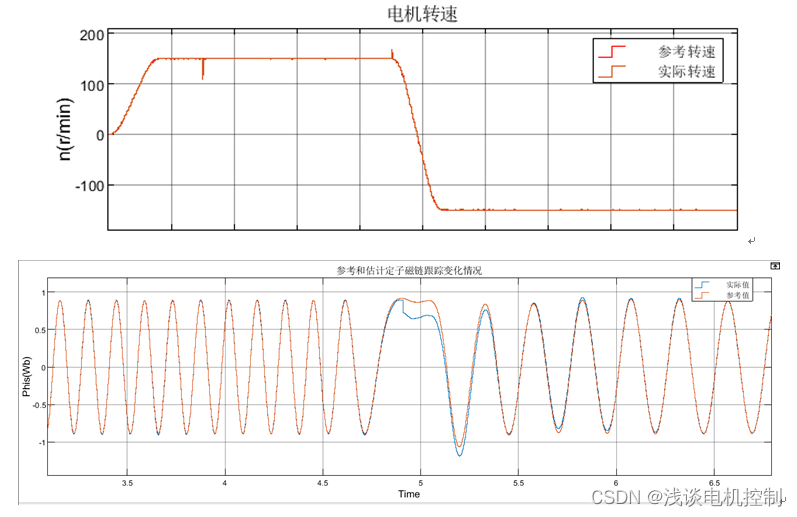
图3-3 LPF串联HPF替换纯积分环节+基于时间向量分析的稳态补偿的改进方法波形变换情况
从图(3-2)和图(3-3)对比可知,LPF串联HPF替换纯积分环节+基于时间向量分析的稳态补偿的改进方法使磁链估计的精度有了很大的提升。
四、总结
电压型磁链观测器因其结构简单,实现方便,所以在实际实用中特别广泛。但因为其本身纯积分环节的特性,在低速区域存在初值问题和零漂问题,所以非常有必要对电压模型进行改进。通过上述的改进后,电压模型磁链观测器在低速区域估计精度有很大的提升。