Particle Life粒子生命演化的MATLAB模拟
- 0 前言
- 1 基本原理
- 1.1 力影响-吸引排斥行为
- 1.2 距离rmax影响
- 2 多种粒子相互作用
- 2.1 双种粒子作用
- 2.1 多种粒子作用
- 3 代码
惯例声明:本人没有相关的工程应用经验,只是纯粹对相关算法感兴趣才写此博客。所以如果有错误,欢迎在评论区指正,不胜感激。本文主要关注于算法的实现,对于实际应用等问题本人没有任何经验,所以也不再涉及。

0 前言
Particle Life粒子生命演化最早是2017年由数字艺术家Jeffery Ventrella定义的,通过非常简单方法的定义粒子间的作用力,从而产生非常复杂的变化。
最开始Jeffery Ventrella管这种生成方法叫做Clusters,其思想来源于生物学家Lynn Margulus。每个粒子具有不同的颜色,每个颜色代表一种属性。粒子不仅会受到自己颜色粒子的吸引或排斥,也会受到其它颜色粒子的吸引和排斥。
在不同的参数下,粒子间会发生复杂的相互运动,某些参数会呈现出复杂的固定斑图,某些参数会呈现出类似生物之间的集群、逃跑、捕食等各种行为。
章节安排为:第一章主要是讲解原理,第二章演示一些基本的例子,第三章给出了基于MATLAB的具体代码。
本文的参考文献如下:
[1]粒子生命演化:由数量庞大的单体粒子演化出复杂的群体行为逻辑
https://www.bilibili.com/video/BV1Dh4y1t7hn/
https://www.youtube.com/watch?v=p4YirERTVF0
[2]https://particle-life.com
[3]blender3.6模拟-粒子生命-Particle Life
https://www.bilibili.com/video/BV1Ns4y1B7Fu/
1 基本原理
首先,假设一群粒子A,它们互相会受到其它粒子的作用力。两个粒子间的力大小是粒子间距离r的函数。
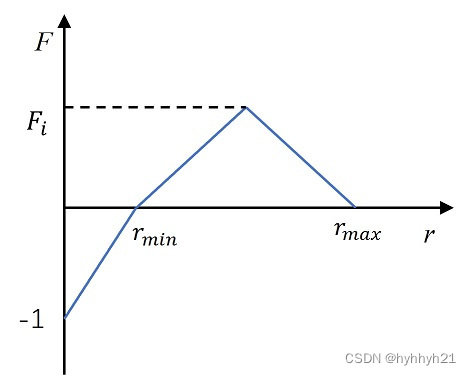
当距离r较小,小于rmin时,设置了-1的排斥力,为防止粒子之间重合。当粒子距离在rmin和rmax之间,粒子最大作用力为Fi。当粒子距离超过rmax,设置作用力为0,防止计算量过大。
当然有几个细节点需要注意:
1粒子所受的作用力只遵循上面的力方程,但不一定遵循牛顿第三定理。粒子的速度和加速度通过牛二律F=ma得到。由于防止粒子运动过快,还需要在全场设置粘滞阻尼。所以其实牛顿第一定理也不满足。当然由于这并不是精准的模拟仿真,所以这些小事可以忽略。
2力Fi是可以自行设置的,当Fi<0,粒子间呈现出排斥性,当Fi>0,粒子间呈现出吸引性,一般不超过±2;
3距离rmin通常在rmax的1/4~1/5左右;rmax和画布大小有关,rmax越大,越会有全局的粒子参与,rmax越小,粒子的行为越局部。
1.1 力影响-吸引排斥行为
当F<0时,粒子间呈现出排斥的现象:
当F>0时,粒子间呈现出吸引的现象:
1.2 距离rmax影响
这里画布大小都定义为1。
当rmax=0.2时,粒子的汇集效果如下:
当rmax=0.5时,粒子的汇集效果更全局化:
2 多种粒子相互作用
2.1 双种粒子作用
对于两种粒子A和B,力Fi共有4个,分别为A对A之间的力,A对B之间的力,B对A之间的力和B对B之间的力。这4个力可以写为一个矩阵形式:
| A | B | |
|---|---|---|
| A | F_AA | F_AB |
| B | F_BA | F_BB |
当假设A对A存在吸引,且A还会吸引B。但是B没有反向作用A的力,B与B之间也不会互相作用。这里的矩阵可以写作:
[
1
0
0.5
0
]
\begin{bmatrix} 1 &0 \\ 0.5&0 \end{bmatrix}
[10.500]
此时得到的图形为细胞图案,A粒子在中间互相吸引到一团,周围吸引一圈B粒子。
再添加两个规则给粒子B,粒子B之间会弱吸引,但粒子B排斥粒子A。此时由于粒子AB间一个吸引一个排斥,构成了不断向前运动的追逐系统。
[
1
−
1
0.5
0.5
]
\begin{bmatrix} 1 &-1 \\ 0.5&0.5 \end{bmatrix}
[10.5−10.5]
追逐模型如下:
之后多种粒子之间的运动规律,也是由上述各个规则叠加演化而成。
但是由于规则数量等于粒子种类N的平方,比如3种粒子就有9种粒子间规则,4种粒子就有16种粒子间规则。这就导致复杂性暴增,产生了无穷多的变化。
2.1 多种粒子作用
由于规则的复杂性,每一次随机出的结果可能都是独一无二的,且是其它人都未曾见过的。这种随机性和复杂性正是Particle Life的迷人之处。
下面列举一些演示计算结果
三种粒子,细胞图案:
三种粒子,岛屿图案:
三种粒子,循环捕食图案:
5种粒子的交互作用,呈现出一定的结构:
3 代码
上面绘图代码见文末。
主要更改粒子数量N,颜色数量NColor即可。建议粒子数量N大概是500倍颜色数量。不易太多,由于MATLAB运行效率较低,所以按照实际电脑配置自行更改。
力的作用距离Rmax在最好是1/c的形式,c是一个整数。
迭代总步数StepMax越大,展示的时间越长。这个如果想长时间欣赏粒子间作用,可以选择一个比较大的数。
图像刷新频率FrameFreq是用来控制多少个时间步显示一次。一般选择2就行,太大会有卡顿的感觉。
clear
clc
close all
%Particle Life粒子生命 MATLAB代码
%% 初始设定参数
%初始设定
rng('shuffle');%随机种子
N=1500;%粒子数量
NColor=3;%颜色数量
Ni=rand(NColor,1);Ni=round(Ni*N/sum(Ni));%随机分配每个颜色对应的粒子数量
N=sum(Ni);
Rmax=1/5;%力作用的距离
mcp=hsv(40);colormap(mcp(1:32,:));%定义展示颜色
StepMax=1.2e3;%结束迭代时间步
FrameFreq=2;%刷新率,正整数,最小为1,越大图像刷新越慢
%% 其它默认参数
%绘图范围
Xlim=[0,1];
Ylim=[0,1];
%定义每个粒子颜色编号
ColorP=zeros(N,1);
for t=1:NColor
ColorP(1+sum(Ni(1:t-1)):sum(Ni(1:t)))=t;
end
%粒子的力关系矩阵
FMat=rand(NColor,NColor)*3-1.5;%所有力Fi在-1.5~1.5之间
%粒子坐标速度
XY_P=rand(N,2)*0.8+0.1;%所有粒子点坐标
VXY_P=zeros(N,2);%粒子点速度
Rmin=Rmax/5;%粒子间的最小作用距离
MeshMax=1/Rmax;%网格数量
dt=5e-3;%时间精度
%构建力函数
t=0;%初始时间
c=Rmax*15.0*sqrt(N);%阻尼,为了防止粒子运动速度太快
%% 循环计算每一步迭代
tJ=0;%绘图计数
for kt=1:StepMax
%计算点对应的网格
XYindx=ceil(XY_P/Rmax);
%循环计算每个点所受的力
ForceP=zeros(N,2);
for kp=1:N %循环每一个点
%该点的颜色、坐标和网格
Color_k=ColorP(kp,:);
XY_k=XY_P(kp,:);
XYindx_k=XYindx(kp,:);
%计算周围点对该点的力
F_k=FMat(Color_k,ColorP)';
[Indx_t,XY_P_B,F_B]=Beside9(XYindx_k,XYindx,MeshMax,XY_P,F_k);%周边点索引
ForceP_k=F_Func(XY_P_B-XY_k,F_B,Rmin,Rmax);
ForceP(kp,:)=ForceP_k;
end
%增加阻尼项,和v相反
ForceP=ForceP-c.*VXY_P;
%根据F更新位移x和速度v。dv=at,dx=vt+at^2/2
VXY_P_New=VXY_P+ForceP*dt;
XY_P=XY_P+0.5*(VXY_P+VXY_P_New)*dt;
VXY_P=VXY_P_New;
%循环边界条件,如果超出边界,就移到另一端
XY_P(XY_P>1)=XY_P(XY_P>1)-1;
XY_P(XY_P<0)=XY_P(XY_P<0)+1;
t=t+dt;%加一时间步
if ~mod(kt,FrameFreq)
f=figure(1);
f.Color=[1,1,1];
cla;
scatter(XY_P(:,1),XY_P(:,2),6,ColorP,"filled");
xlim([0,1]);ylim([0,1]);
%set(gca,'XTick',[],'YTick',[])
axis off
pause(0.01)%每一帧图像停留时间
tJ=tJ+1;
end
end
%% 后置函数
function Ft2=F_Func(xy,F,rmin,rmax)
%粒子左右函数
%xy,N行2列的向量,代表别的点距离O点的距离向量
%F,N行1列的向量,代表吸引力F大小
rmid=0.5*(rmax+rmin);
dmid=0.5*(rmax-rmin);
r=sqrt(xy(:,1).^2+xy(:,2).^2);%距离
%r(r==0)=rmax;
Ft=zeros(size(r));
%第一段
indx1=(r<rmin);
Ft(indx1)=r(indx1)/rmin-1;
%第二段
indx_last=~indx1;
indx2=indx_last&(r<rmid);
Ft(indx2)=F(indx2).*(r(indx2)-rmin)/dmid;
%第三段
indx3=(r>=rmid)&(r<rmax);
Ft(indx3)=-F(indx3).*(r(indx3)-rmax)/dmid;
%计算力向量
dir_xy=xy./r;
dir_xy(isnan(dir_xy))=0;
Ft_Vec=dir_xy.*(Ft*ones(1,2));
%计算合力
Ft2=sum(Ft_Vec,1);
end
function [BesideIndx1,XY_P_B,F_P]=Beside9(XYindx0,XYindx1,NMesh,XY_P,F_P)
%寻找点0附近区域3×3共9格区域内
%开启循环边界条件
%复制出边界点,然后再计算。因为有的点在rmax较大的循环边界条件,会同时向上和下吸引
if XYindx0(1)==1
%把最后一列复制一份到前面
indx_t=XYindx1(:,1)==NMesh;
XYindx1_t=XYindx1(indx_t,:);
XYindx1_t(:,1)=0;%赋值为0
XYindx1=[XYindx1;XYindx1_t];
XY_P=[XY_P;XY_P(indx_t,:)+[-1,0]];
F_P=[F_P;F_P(indx_t)];
end
if XYindx0(1)==NMesh
%把第一列复制一份到最后
indx_t=XYindx1(:,1)==1;
XYindx1_t=XYindx1(indx_t,:);
XYindx1_t(:,1)=NMesh+1;%赋值为NMesh+1
XYindx1=[XYindx1;XYindx1_t];
XY_P=[XY_P;XY_P(indx_t,:)+[1,0]];
F_P=[F_P;F_P(indx_t)];
end
if XYindx0(2)==1
%把最后一行复制一份到前面
indx_t=XYindx1(:,2)==NMesh;
XYindx1_t=XYindx1(indx_t,:);
XYindx1_t(:,2)=0;%赋值为0
XYindx1=[XYindx1;XYindx1_t];
XY_P=[XY_P;XY_P(indx_t,:)+[0,-1]];
F_P=[F_P;F_P(indx_t)];
end
if XYindx0(2)==NMesh
%把第一行复制一份到最后
indx_t=XYindx1(:,2)==1;
XYindx1_t=XYindx1(indx_t,:);
XYindx1_t(:,2)=NMesh+1;%赋值为NMesh+1
XYindx1=[XYindx1;XYindx1_t];
XY_P=[XY_P;XY_P(indx_t,:)+[0,1]];
F_P=[F_P;F_P(indx_t)];
end
%夹在范围之内的点有哪些
BesideIndx_X=(XYindx0(1)-1<=XYindx1(:,1))&(XYindx1(:,1)<=XYindx0(1)+1);
BesideIndx_Y=(XYindx0(2)-1<=XYindx1(:,2))&(XYindx1(:,2)<=XYindx0(2)+1);
BesideIndx1=BesideIndx_X & BesideIndx_Y;
XY_P_B=XY_P(BesideIndx1,:);
F_P=F_P(BesideIndx1);
end


![1、[春秋云镜]CVE-2022-32991](https://img-blog.csdnimg.cn/5c1d602750f94f68a82bed5ba679df47.png#pic_center)