目录
- 一、部分傅里叶重建
- 二、部分傅里叶重建算法
- 2.1 填零
- 2.2 零差处理
一、部分傅里叶重建
在部分傅里叶采集中,数据并不是绕K空间中心对称收集的,而是K空间的一半是完全填充的,另一半只收集了一小部分数据。
部分傅里叶采集所依据的原理是:如果物体是实的(real),其傅里叶变换是厄米的,意味着绕K空间中心实部是对称的,虚部是反对称的。
在频率和相位方向部分傅里叶采集的主要优点是分别降低了回波时间(TE)和扫描时间。在频率编码方向,部分傅里叶采集也减少了沿该轴的梯度矩,从而降低了流动和运动伪影。由K空间最大范围决定的空间分辨率不受影响,与全K空间采集情况等价,只是SNR有所降低,也可能引进一些图像伪影。
然而,由诸多因素例如运动、共振频率偏移、硬件群时延、涡流、接受线圈B1场不均匀等引起的有害相移,使被建图像失真。因此,在图中显示的未完全填充的半K空间中的额外数据(有时叫”过扫描数据”)被用来克服这些问题。
部分傅里叶采集也可用于3D扫描的层面选择方向(即第二个相位编码方向),但不普遍。因为层面的相位编码步数一般不是很大,考虑到还需要一些过扫描数据,使得时间的节省并不特别显著。
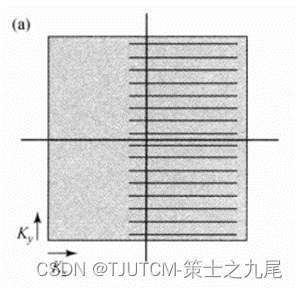
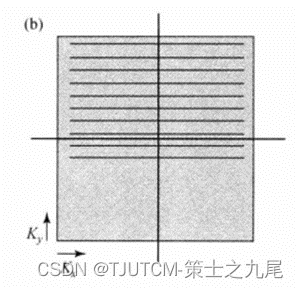
(a)是沿频率编码方向覆盖部分K空间(部分Kx或部分回波)
(b)是沿相位编码方向覆盖部分K空间(部分Ky或部分Nex)
二、部分傅里叶重建算法
2.1 填零
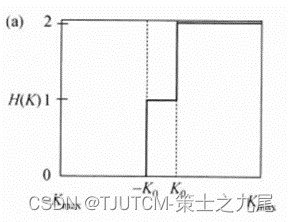
填零就是 未测量的K空间数据用零来代替,然后用传统重建以得到图像。对于全K空间采集,原始数据填零被普遍用来内插图像并降低部分体积效应;对于部分傅里叶采集,填零可以用来代替未测量的数据,如果希望图像内插还可以补额外的零。填零之后,可用基于标准傅里叶变换的全K空间重建。
填零通常导致靠近锐利边缘处有一些Gibbs跳动伪影,是 由于K空间数据截断引起的。填零的优点是:能给出物体低空间频率过扫描范围内比较真实的图像。对此低空间频率范围,相位信息被保留。因此,大结构的相位是精确的,允许填零由于相敏重建。合理的相位精度通常需要采集比较高分数的K空间,例如0.75或更高。

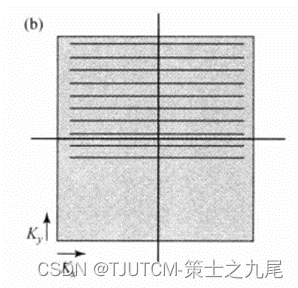
(a)是沿频率编码方向覆盖部分K空间(部分Kx或部分回波)
(b)是沿相位编码方向覆盖部分K空间(部分Ky或部分Nex)
2.2 零差处理
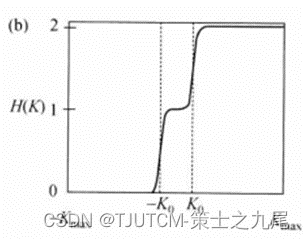
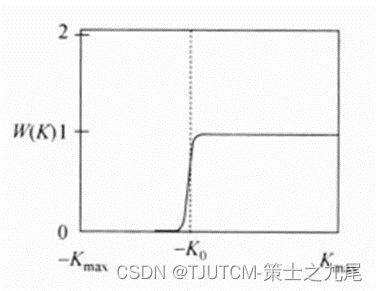
零差处理是 从自身数据产生的低空间频率相位map去校正由不完全K空间数据重建产生的相位误差。零差处理利用的是K空间数据的厄米共轭对称性。零差不适合需要图像相位的那些应用,如匀场、相位对比度(用相位差重建的)和相敏热成像;然而,如果复数差运算在K空间执行,则复数差相位对比度可以用零差成像。
电感阻止高频信号通过而允许低频信号通过,电容的特性却相反。信号能够通过电感的滤波器、或者通过电容连接到地的滤波器对于低频信号的衰减要比高频信号小,称为低通滤波器。
最简单的高通滤波器是“一阶高通滤波器”,它的的特性一般用一阶线性微分方程表示,它的左边与一阶低通滤波器完全相同,仅右边是激励源的导数而不是激励源本身。当较低的频率通过该系统时,没有或几乎没有什么输出,而当较高的频率通过该系统时,将会受到较小的衰减。实际上,对于极高的频率而言,电容器相当于“短路”一样,这些频率,基本上都可以在电阻两端获得输出。换言之,这个系统适宜于通过高频率而对低频率有较大的阻碍作用,是一个最简单的“高通滤波器”。
零差方法的缺点是 方程中用的低频相位map不能准确地描写急速变换的相位。为解决此问题,可用迭代部分傅里叶方法。该方法 用零差重建估计模像,同时从低频相位map估计相位。结合估计的模像和相位像给出一个复数像,对此复数像经傅里叶变换可得到估计的K空间数据。
如果部分傅里叶采集用在两个正交方向,假定部分采集分数大于0.5,则一个方向可用零差重建处理,而另一个方向只能用填零处理。即如果部分傅里叶采集只用在一个方向,其他方向必须首先用正常(即全K空间)算法处理。



![BUUCTF [SWPU2019]Web1](https://img-blog.csdnimg.cn/a3c915f39a54478daf7480880e3d1354.png)
