1.前言
Nvidia Jetson 编解码开发(6)Jetpack 4.x版本Multimedia API 硬件编码开发--输入端对接Camera V4L2采集_free-xx的博客-CSDN博客
基于上篇基于开发
需求:
(1)2路Camera采集 + H265编码
(2)2路编码完的H265数据通过ROS 发布出去,上位机播放
2. 开发记录
2.1 ROS节点初始化

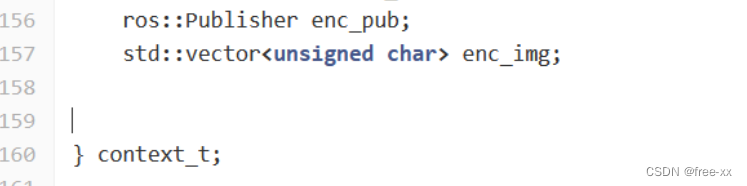
2.2 填充context_t 结构体
由于encode处理在回调函数里面;
所以ROS相关句柄和数据容器最好放在 context_t 这个结构体里
后续获取也比较容易
2.3 线程创建
每个编码通道创建一个线程
pth