1. 整个识别的流程图:
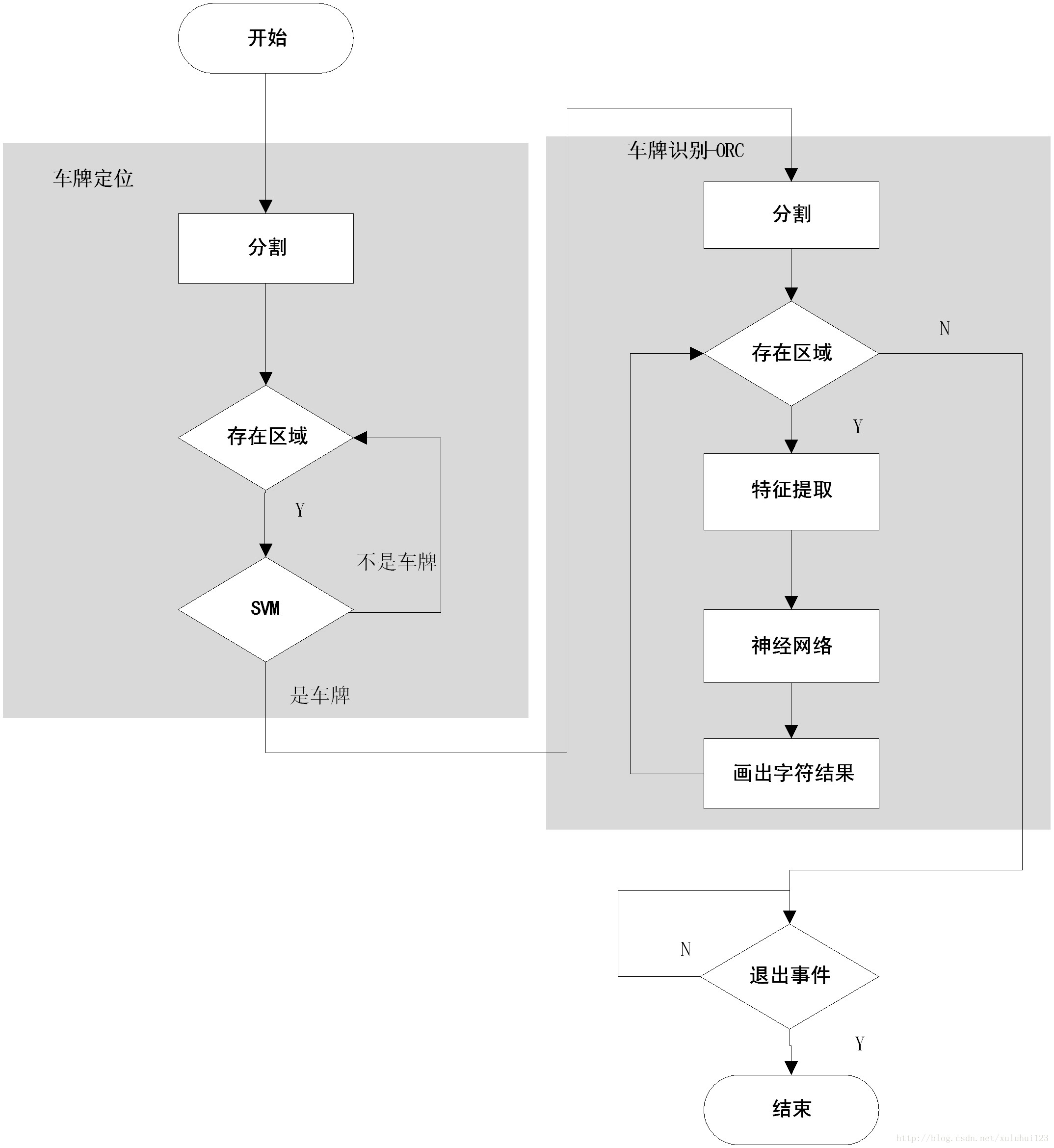
2. 车牌定位中分割流程图:
三、车牌识别中字符分割流程图:


1.准备数据集
下载车牌相关字符样本用于训练和测试,本文使用14个汉字样本和34个数字跟字母样本,每个字符样本数为40,样本尺寸为28*28。

数据集下载地址
https://download.csdn.net/download/hai411741962/88248392
下载不了,评论区留言
2. 编码训练代码
import cv2
import numpy as np
from numpy.linalg import norm
import sys
import os
import json
SZ = 20 #训练图片长宽
MAX_WIDTH = 1000 #原始图片最大宽度
Min_Area = 2000 #车牌区域允许最大面积
PROVINCE_START = 1000
#不能保证包括所有省份
provinces = [
"zh_cuan", "川",
"zh_e", "鄂",
"zh_gan", "赣",
"zh_gan1", "甘",
"zh_gui", "贵",
"zh_gui1", "桂",
"zh_hei", "黑",
"zh_hu", "沪",
"zh_ji", "冀",
"zh_jin", "津",
"zh_jing", "京",
"zh_jl", "吉",
"zh_liao", "辽",
"zh_lu", "鲁",
"zh_meng", "蒙",
"zh_min", "闽",
"zh_ning", "宁",
"zh_qing", "靑",
"zh_qiong", "琼",
"zh_shan", "陕",
"zh_su", "苏",
"zh_sx", "晋",
"zh_wan", "皖",
"zh_xiang", "湘",
"zh_xin", "新",
"zh_yu", "豫",
"zh_yu1", "渝",
"zh_yue", "粤",
"zh_yun", "云",
"zh_zang", "藏",
"zh_zhe", "浙"
]
class StatModel(object):
def load(self, fn):
self.model = self.model.load(fn)#从文件载入训练好的模型
def save(self, fn):
self.model.save(fn)#保存训练好的模型到文件中
class SVM(StatModel):
def __init__(self, C = 1, gamma = 0.5):
self.model = cv2.ml.SVM_create()#生成一个SVM模型
self.model.setGamma(gamma) #设置Gamma参数,demo中是0.5
self.model.setC(C)# 设置惩罚项, 为:1
self.model.setKernel(cv2.ml.SVM_RBF)#设置核函数
self.model.setType(cv2.ml.SVM_C_SVC)#设置SVM的模型类型:SVC是分类模型,SVR是回归模型
#训练svm
def train(self, samples, responses):
self.model.train(samples, cv2.ml.ROW_SAMPLE, responses)#训练
#字符识别
def predict(self, samples):
r = self.model.predict(samples)#预测
return r[1].ravel()
#来自opencv的sample,用于svm训练
def deskew(img):
m = cv2.moments(img)
if abs(m['mu02']) < 1e-2:
return img.copy()
skew = m['mu11']/m['mu02']
M = np.float32([[1, skew, -0.5*SZ*skew], [0, 1, 0]])
img = cv2.warpAffine(img, M, (SZ, SZ), flags=cv2.WARP_INVERSE_MAP | cv2.INTER_LINEAR)
return img
#来自opencv的sample,用于svm训练
def preprocess_hog(digits):
samples = []
for img in digits:
gx = cv2.Sobel(img, cv2.CV_32F, 1, 0)
gy = cv2.Sobel(img, cv2.CV_32F, 0, 1)
mag, ang = cv2.cartToPolar(gx, gy)
bin_n = 16
bin = np.int32(bin_n*ang/(2*np.pi))
bin_cells = bin[:10,:10], bin[10:,:10], bin[:10,10:], bin[10:,10:]
mag_cells = mag[:10,:10], mag[10:,:10], mag[:10,10:], mag[10:,10:]
hists = [np.bincount(b.ravel(), m.ravel(), bin_n) for b, m in zip(bin_cells, mag_cells)]
hist = np.hstack(hists)
# transform to Hellinger kernel
eps = 1e-7
hist /= hist.sum() + eps
hist = np.sqrt(hist)
hist /= norm(hist) + eps
samples.append(hist)
return np.float32(samples)
def save_traindata(model,modelchinese):
if not os.path.exists("module\\svm.dat"):
model.save("module\\svm.dat")
if not os.path.exists("module\\svmchinese.dat"):
modelchinese.save("module\\svmchinese.dat")
def train_svm():
#识别英文字母和数字
model = SVM(C=1, gamma=0.5)
#识别中文
modelchinese = SVM(C=1, gamma=0.5)
if os.path.exists("svm.dat"):
model.load("svm.dat")
else:
chars_train = []
chars_label = []
for root, dirs, files in os.walk("train\\chars2"):
if len(os.path.basename(root)) > 1:
continue
root_int = ord(os.path.basename(root))
for filename in files:
filepath = os.path.join(root,filename)
digit_img = cv2.imread(filepath)
digit_img = cv2.cvtColor(digit_img, cv2.COLOR_BGR2GRAY)
chars_train.append(digit_img)
#chars_label.append(1)
chars_label.append(root_int)
chars_train = list(map(deskew, chars_train))
#print(chars_train)
chars_train = preprocess_hog(chars_train)
#print(chars_train)
#chars_train = chars_train.reshape(-1, 20, 20).astype(np.float32)
chars_label = np.array(chars_label)
model.train(chars_train, chars_label)
if os.path.exists("svmchinese.dat"):
modelchinese.load("svmchinese.dat")
else:
chars_train = []
chars_label = []
for root, dirs, files in os.walk("train\\charsChinese"):
if not os.path.basename(root).startswith("zh_"):
continue
pinyin = os.path.basename(root)
index = provinces.index(pinyin) + PROVINCE_START + 1 #1是拼音对应的汉字
for filename in files:
filepath = os.path.join(root,filename)
digit_img = cv2.imread(filepath)
digit_img = cv2.cvtColor(digit_img, cv2.COLOR_BGR2GRAY)
chars_train.append(digit_img)
#chars_label.append(1)
chars_label.append(index)
chars_train = list(map(deskew, chars_train))
chars_train = preprocess_hog(chars_train)
#chars_train = chars_train.reshape(-1, 20, 20).astype(np.float32)
chars_label = np.array(chars_label)
print(chars_train.shape)
modelchinese.train(chars_train, chars_label)
save_traindata(model,modelchinese)
train_svm()
运行代码后会生成两个模型文件,下面验证两个模型文件。

import cv2
import numpy as np
import json
import train
SZ = 20 #训练图片长宽
MAX_WIDTH = 1000 #原始图片最大宽度
Min_Area = 2000 #车牌区域允许最大面积
PROVINCE_START = 1000
#读取图片文件
def imreadex(filename):
return cv2.imdecode(np.fromfile(filename, dtype=np.uint8), cv2.IMREAD_COLOR)
def point_limit(point):
if point[0] < 0:
point[0] = 0
if point[1] < 0:
point[1] = 0
#根据设定的阈值和图片直方图,找出波峰,用于分隔字符
def find_waves(threshold, histogram):
up_point = -1#上升点
is_peak = False
if histogram[0] > threshold:
up_point = 0
is_peak = True
wave_peaks = []
for i,x in enumerate(histogram):
if is_peak and x < threshold:
if i - up_point > 2:
is_peak = False
wave_peaks.append((up_point, i))
elif not is_peak and x >= threshold:
is_peak = True
up_point = i
if is_peak and up_point != -1 and i - up_point > 4:
wave_peaks.append((up_point, i))
return wave_peaks
#根据找出的波峰,分隔图片,从而得到逐个字符图片
def seperate_card(img, waves):
part_cards = []
for wave in waves:
part_cards.append(img[:, wave[0]:wave[1]])
return part_cards
class CardPredictor:
def __init__(self):
#车牌识别的部分参数保存在json中,便于根据图片分辨率做调整
f = open('config.json')
j = json.load(f)
for c in j["config"]:
if c["open"]:
self.cfg = c.copy()
break
else:
raise RuntimeError('没有设置有效配置参数')
def load_svm(self):
#识别英文字母和数字
self.model = train.SVM(C=1, gamma=0.5)#SVM(C=1, gamma=0.5)
#识别中文
self.modelchinese = train.SVM(C=1, gamma=0.5)#SVM(C=1, gamma=0.5)
self.model.load("module\\svm.dat")
self.modelchinese.load("module\\svmchinese.dat")
def accurate_place(self, card_img_hsv, limit1, limit2, color):
row_num, col_num = card_img_hsv.shape[:2]
xl = col_num
xr = 0
yh = 0
yl = row_num
#col_num_limit = self.cfg["col_num_limit"]
row_num_limit = self.cfg["row_num_limit"]
col_num_limit = col_num * 0.8 if color != "green" else col_num * 0.5#绿色有渐变
for i in range(row_num):
count = 0
for j in range(col_num):
H = card_img_hsv.item(i, j, 0)
S = card_img_hsv.item(i, j, 1)
V = card_img_hsv.item(i, j, 2)
if limit1 < H <= limit2 and 34 < S and 46 < V:
count += 1
if count > col_num_limit:
if yl > i:
yl = i
if yh < i:
yh = i
for j in range(col_num):
count = 0
for i in range(row_num):
H = card_img_hsv.item(i, j, 0)
S = card_img_hsv.item(i, j, 1)
V = card_img_hsv.item(i, j, 2)
if limit1 < H <= limit2 and 34 < S and 46 < V:
count += 1
if count > row_num - row_num_limit:
if xl > j:
xl = j
if xr < j:
xr = j
return xl, xr, yh, yl
def predict(self, car_pic, resize_rate=1):
if type(car_pic) == type(""):
img = imreadex(car_pic)
else:
img = car_pic
pic_hight, pic_width = img.shape[:2]
if resize_rate != 1:
img = cv2.resize(img, (int(pic_width*resize_rate), int(pic_hight*resize_rate)), interpolation=cv2.INTER_AREA)
pic_hight, pic_width = img.shape[:2]
#cv2.imshow('img',img)
#cv2.waitKey(0)
print("h,w:", pic_hight, pic_width)
blur = self.cfg["blur"]
#高斯去噪
if blur > 0:
img = cv2.GaussianBlur(img, (blur, blur), 0)#图片分辨率调整
oldimg = img
img = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
#去掉图像中不会是车牌的区域
kernel = np.ones((20, 20), np.uint8)
img_opening = cv2.morphologyEx(img, cv2.MORPH_OPEN, kernel)
img_opening = cv2.addWeighted(img, 1, img_opening, -1, 0);
#找到图像边缘
ret, img_thresh = cv2.threshold(img_opening, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
img_edge = cv2.Canny(img_thresh, 100, 200)#边缘检测
#使用开运算和闭运算让图像边缘成为一个整体
kernel = np.ones((self.cfg["morphologyr"], self.cfg["morphologyc"]), np.uint8)
img_edge1 = cv2.morphologyEx(img_edge, cv2.MORPH_CLOSE, kernel)
img_edge2 = cv2.morphologyEx(img_edge1, cv2.MORPH_OPEN, kernel)
#查找图像边缘整体形成的矩形区域,可能有很多,车牌就在其中一个矩形区域中
contours, hierarchy = cv2.findContours(img_edge2, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
print('len(contours)', len(contours))#找出区域
contours = [cnt for cnt in contours if cv2.contourArea(cnt) > Min_Area]
print('len(contours)', len(contours))#cv2.contourArea计算面积
#一一排除不是车牌的矩形区域
car_contours = []
for cnt in contours:
rect = cv2.minAreaRect(cnt)#minAreaRect
area_width, area_height = rect[1]
if area_width < area_height:
area_width, area_height = area_height, area_width
wh_ratio = area_width / area_height#长宽比
#print(wh_ratio)
#要求矩形区域长宽比在2到5.5之间,2到5.5是车牌的长宽比,其余的矩形排除
if wh_ratio > 2 and wh_ratio < 5.5:
car_contours.append(rect)
box = cv2.boxPoints(rect)#cv2.boxPoints()可获取该矩形的四个顶点坐标。
print(box)
box = np.int0(box) #转成整数
print(box)
oldimg = cv2.drawContours(oldimg, [box], 0, (0, 0, 255), 2)
print(len(car_contours))
print("精确定位")
card_imgs = []
#矩形区域可能是倾斜的矩形,需要矫正,以便使用颜色定位
for rect in car_contours:
if rect[2] > -1 and rect[2] < 1:#创造角度,使得左、高、右、低拿到正确的值
angle = 1
else:
angle = rect[2]
rect = (rect[0], (rect[1][0]+5, rect[1][1]+5), angle)#扩大范围,避免车牌边缘被排除
box = cv2.boxPoints(rect)
heigth_point = right_point = [0, 0]
left_point = low_point = [pic_width, pic_hight]
for point in box:
if left_point[0] > point[0]:
left_point = point
if low_point[1] > point[1]:
low_point = point
if heigth_point[1] < point[1]:
heigth_point = point
if right_point[0] < point[0]:
right_point = point
if left_point[1] <= right_point[1]:#正角度
new_right_point = [right_point[0], heigth_point[1]]
pts2 = np.float32([left_point, heigth_point, new_right_point])#字符只是高度需要改变
pts1 = np.float32([left_point, heigth_point, right_point])
M = cv2.getAffineTransform(pts1, pts2)
dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))
point_limit(new_right_point)
point_limit(heigth_point)
point_limit(left_point)
card_img = dst[int(left_point[1]):int(heigth_point[1]), int(left_point[0]):int(new_right_point[0])]
if(len(card_img)>0):
card_imgs.append(card_img)
elif left_point[1] > right_point[1]:#负角度
new_left_point = [left_point[0], heigth_point[1]]
pts2 = np.float32([new_left_point, heigth_point, right_point])#字符只是高度需要改变
pts1 = np.float32([left_point, heigth_point, right_point])
M = cv2.getAffineTransform(pts1, pts2)
dst = cv2.warpAffine(oldimg, M, (pic_width, pic_hight))
point_limit(right_point)
point_limit(heigth_point)
point_limit(new_left_point)
card_img = dst[int(right_point[1]):int(heigth_point[1]), int(new_left_point[0]):int(right_point[0])]
card_imgs.append(card_img)
#cv2.imshow("card", card_img)
#cv2.waitKey(0)
#开始使用颜色定位,排除不是车牌的矩形,目前只识别蓝、绿、黄车牌
colors = []
for card_index,card_img in enumerate(card_imgs):
print(len(card_imgs))
green = yello = blue = black = white = 0
card_img_hsv = cv2.cvtColor(card_img, cv2.COLOR_BGR2HSV)
print("card_img_hsv.shape")
print(card_img_hsv.shape)
#有转换失败的可能,原因来自于上面矫正矩形出错
if card_img_hsv is None:
continue
row_num, col_num= card_img_hsv.shape[:2]
card_img_count = row_num * col_num
for i in range(row_num):
for j in range(col_num):
H = card_img_hsv.item(i, j, 0)
S = card_img_hsv.item(i, j, 1)
V = card_img_hsv.item(i, j, 2)
if 11 < H <= 34 and S > 34:#图片分辨率调整
yello += 1
elif 35 < H <= 99 and S > 34:#图片分辨率调整
green += 1
elif 99 < H <= 124 and S > 34:#图片分辨率调整
blue += 1
if 0 < H <180 and 0 < S < 255 and 0 < V < 46:
black += 1
elif 0 < H <180 and 0 < S < 43 and 221 < V < 225:
white += 1
color = "no"
#根据HSV判断车牌颜色
limit1 = limit2 = 0
if yello*2 >= card_img_count:
color = "yello"
limit1 = 11
limit2 = 34#有的图片有色偏偏绿
elif green*2 >= card_img_count:
color = "green"
limit1 = 35
limit2 = 99
elif blue*2 >= card_img_count:
color = "blue"
limit1 = 100
limit2 = 124#有的图片有色偏偏紫
elif black + white >= card_img_count*0.7:#TODO
color = "bw"
colors.append(color)
print("blue, green, yello, black, white, card_img_count:")
print(blue," " ,green," ", yello," ", black," ", white," ", card_img_count)
print("车牌颜色:",color)
# cv2.imshow("color", card_img)
# cv2.waitKey(0)
if limit1 == 0:
continue
#以上为确定车牌颜色
#以下为根据车牌颜色再定位,缩小边缘非车牌边界
xl, xr, yh, yl = self.accurate_place(card_img_hsv, limit1, limit2, color)
if yl == yh and xl == xr:
continue
need_accurate = False
if yl >= yh:
yl = 0
yh = row_num
need_accurate = True
if xl >= xr:
xl = 0
xr = col_num
need_accurate = True
card_imgs[card_index] = card_img[yl:yh, xl:xr] if color != "green" or yl < (yh-yl)//4 else card_img[yl-(yh-yl)//4:yh, xl:xr]
if need_accurate:#可能x或y方向未缩小,需要再试一次
card_img = card_imgs[card_index]
card_img_hsv = cv2.cvtColor(card_img, cv2.COLOR_BGR2HSV)
xl, xr, yh, yl = self.accurate_place(card_img_hsv, limit1, limit2, color)
if yl == yh and xl == xr:
continue
if yl >= yh:
yl = 0
yh = row_num
if xl >= xr:
xl = 0
xr = col_num
card_imgs[card_index] = card_img[yl:yh, xl:xr] if color != "green" or yl < (yh-yl)//4 else card_img[yl-(yh-yl)//4:yh, xl:xr]
#以上为车牌定位
#以下为识别车牌中的字符
predict_result = []
roi = None
card_color = None
for i, color in enumerate(colors):
if color in ("blue", "yello", "green"):
card_img = card_imgs[i]
gray_img = cv2.cvtColor(card_img, cv2.COLOR_BGR2GRAY)
#黄、绿车牌字符比背景暗、与蓝车牌刚好相反,所以黄、绿车牌需要反向
if color == "green" or color == "yello":
gray_img = cv2.bitwise_not(gray_img)
ret, gray_img = cv2.threshold(gray_img, 0, 255, cv2.THRESH_BINARY + cv2.THRESH_OTSU)
#查找水平直方图波峰
x_histogram = np.sum(gray_img, axis=1)
x_min = np.min(x_histogram)
x_average = np.sum(x_histogram)/x_histogram.shape[0]
x_threshold = (x_min + x_average)/2
wave_peaks = find_waves(x_threshold, x_histogram)
if len(wave_peaks) == 0:
print("peak less 0:")
continue
#认为水平方向,最大的波峰为车牌区域
wave = max(wave_peaks, key=lambda x:x[1]-x[0])
gray_img = gray_img[wave[0]:wave[1]]
#查找垂直直方图波峰
row_num, col_num= gray_img.shape[:2]
#去掉车牌上下边缘1个像素,避免白边影响阈值判断
gray_img = gray_img[1:row_num-1]
# cv2.imshow("gray_img", gray_img)#二值化
# cv2.waitKey(0)
y_histogram = np.sum(gray_img, axis=0)
y_min = np.min(y_histogram)
y_average = np.sum(y_histogram)/y_histogram.shape[0]
y_threshold = (y_min + y_average)/5#U和0要求阈值偏小,否则U和0会被分成两半
wave_peaks = find_waves(y_threshold, y_histogram)
#车牌字符数应大于6
if len(wave_peaks) <= 6:
print("peak less 1:", len(wave_peaks))
continue
wave = max(wave_peaks, key=lambda x:x[1]-x[0])
max_wave_dis = wave[1] - wave[0]
#判断是否是左侧车牌边缘
if wave_peaks[0][1] - wave_peaks[0][0] < max_wave_dis/3 and wave_peaks[0][0] == 0:
wave_peaks.pop(0)
#组合分离汉字
cur_dis = 0
for i,wave in enumerate(wave_peaks):
if wave[1] - wave[0] + cur_dis > max_wave_dis * 0.6:
break
else:
cur_dis += wave[1] - wave[0]
if i > 0:
wave = (wave_peaks[0][0], wave_peaks[i][1])
wave_peaks = wave_peaks[i+1:]
wave_peaks.insert(0, wave)
#去除车牌上的分隔点
point = wave_peaks[2]
if point[1] - point[0] < max_wave_dis/3:
point_img = gray_img[:,point[0]:point[1]]
if np.mean(point_img) < 255/5:
wave_peaks.pop(2)
if len(wave_peaks) <= 6:
print("peak less 2:", len(wave_peaks))
continue
part_cards = seperate_card(gray_img, wave_peaks)
for i, part_card in enumerate(part_cards):
#可能是固定车牌的铆钉
if np.mean(part_card) < 255/5:
print("a point")
continue
part_card_old = part_card
w = part_card.shape[1] // 3
part_card = cv2.copyMakeBorder(part_card, 0, 0, w, w, cv2.BORDER_CONSTANT, value = [0,0,0])
part_card = cv2.resize(part_card, (SZ, SZ), interpolation=cv2.INTER_AREA)
cv2.destroyAllWindows()
part_card = train.preprocess_hog([part_card])#preprocess_hog([part_card])
if i == 0:
resp = self.modelchinese.predict(part_card)#第一个字符调用中文svm模型
charactor = train.provinces[int(resp[0]) - PROVINCE_START]
else:
resp = self.model.predict(part_card)#其他字符调用字母数字svm模型
charactor = chr(resp[0])
#判断最后一个数是否是车牌边缘,假设车牌边缘被认为是1
if charactor == "1" and i == len(part_cards)-1:
if part_card_old.shape[0]/part_card_old.shape[1] >= 8:#1太细,认为是边缘
print(part_card_old.shape)
continue
predict_result.append(charactor)
roi = card_img
card_color = color
break
return predict_result, roi, card_color#识别到的字符、定位的车牌图像、车牌颜色
if __name__ == '__main__':
c = CardPredictor()
c.load_svm()#加载训练好的模型
img = cv2.imread("test\\car20.jpg")
img = cv2.resize(img, (1000, 1000), interpolation=cv2.INTER_AREA)
r, roi, color = c.predict(img)
print(r)
运行结果:
车牌颜色: blue
['津', 'N', 'A', 'V', '8', '8', '8']
从结果看比上一节的准确多了。