原文链接
https://www.intelrealsense.com/which-device-is-right-for-you/
无论您是深度和跟踪硬件的新手,还是经验丰富的专业人士,确定我们提供的众多英特尔实感产品中哪些产品适合您的项目仍然是一项挑战。在这篇文章中,我们将讨论英特尔实感深度摄像头 SR305、D415、D435 和 D435i,以及英特尔实感跟踪摄像头 T265 和新型激光雷达摄像头 L515。
首先,深度有什么用?跟踪是什么意思?深度相机不仅可以看到场景的 2D 细节,还可以计算每个像素距相机的距离。像 D400 系列这样的立体相机从相机上的两个传感器拍摄两张图像,这些图像的视角略有不同,然后对它们进行比较。两个图像中相同点之间的偏移可用于确定深度。L515 等 LiDAR 相机向场景周围发射激光,并测量光反射回相机所需的时间。像 SR305 这样的编码光相机使用介于两种方法之间的方法,即投射图案光,然后评估图案随时间的变形情况。
当您拥有这些深度图像时,您可以将它们用于许多不同的目的。3D 扫描是一种流行的应用,此外还有骨骼和手势跟踪、测量、体积捕捉、VR 和 AR,以及机器人和无人机中的许多用途。
另一方面,当我们谈论跟踪相机时,我们谈论的是可以跟踪其自身位置和空间运动的相机。虽然深度相机可用于跟踪相机前面的物体和人,但像 T265 这样的跟踪相机可用于高精度跟踪其附着的任何物体。这可能是增强现实耳机、自主无人机或自主机器人之类的东西。
相机详细分解
从立体深度相机开始,让我们看看模型之间有什么相同之处。从物理上看,前三款立体深度相机(D415、D435、D435i)的尺寸大致相同(毫米以内)。D455 尺寸较大,可适应传感器之间更大的距离(或基线)95 毫米。它们都使用相同的视觉处理器通过 USB 3.1 提供 RGB-D 数据,并且具有相同的最大深度分辨率 1280 x 720。有关具体测量结果,请参阅帖子末尾的完整比较表。立体深度相机的一个关键优势是它们在室内和室外表现同样出色 - 尽管您应该避免太阳直接指向相机镜头的情况。
D415 和 D435
这两个型号之间有两个主要区别 - 视场 (FOV) 和快门类型。D435i 在各方面都与 D435 相同,只是增加了惯性测量单元或 IMU,因此对于所有其他功能,您可以假设它与 D435 相同。
视场
英特尔实感深度摄像头 D415 的视场角 (FOV) 约为 650°。英特尔实感 D435 深度摄像头具有更宽的视场角,约为 85°。
这对于相机的性能意味着什么?由于英特尔实感 D435 深度摄像头的视场较大,因此在查看图像的特定部分时,您会发现粒度较小。
这些图片显示了每个摄像头传感器所见内容的放大和夸大视图:
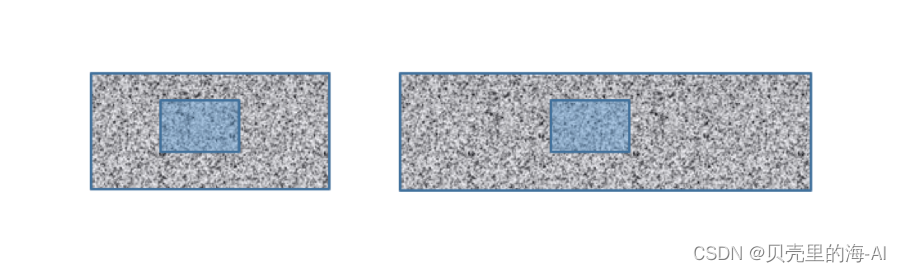
查看图片上相同大小的区域,请注意英特尔实感 D415 具有更高的像素密度,这意味着它对于任何给定区域都比英特尔实感 D435 更准确在相同的点上。在相同分辨率下,D415 每度拥有更多像素,因为它在更窄的视场中拥有相同数量的像素。虽然这在某些情况下可能并不重要,例如物体回避或人员检测,但当准确性是首要考虑因素时(例如在 3D 扫描中),D415 将提供更好、更准确的扫描。简而言之,D415 的精度是 D435 的两倍以上。
快门类型
其次,英特尔实感 D415 深度摄像头具有滚动快门,而英特尔实感 D435 深度摄像头具有全局快门。具有卷帘快门的相机通过快速左右或垂直扫描来记录场景中的所有像素。这通常会在几个帧的过程中发生,但数据将保存为单个帧。
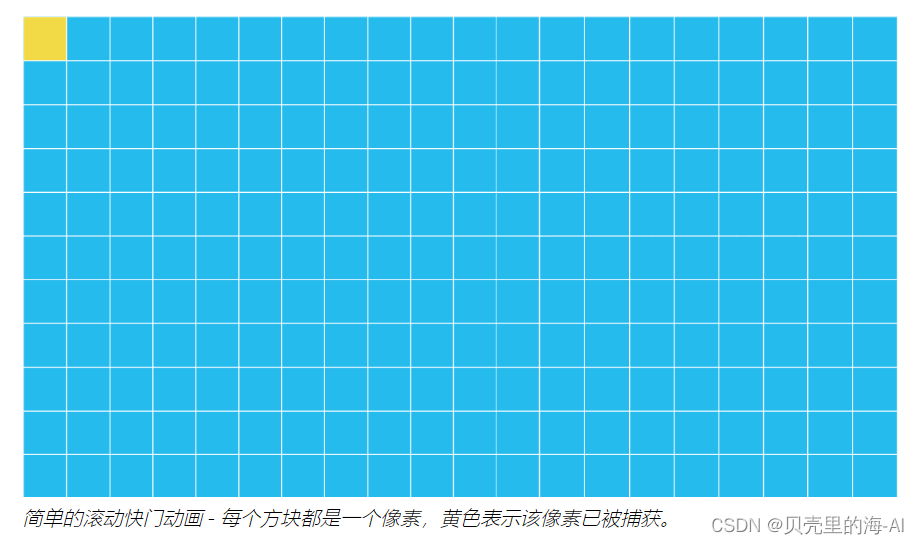
全局快门相机的操作方式有所不同,它们在单个帧中拍摄整个场景,因此每个像素都会被同时捕获。
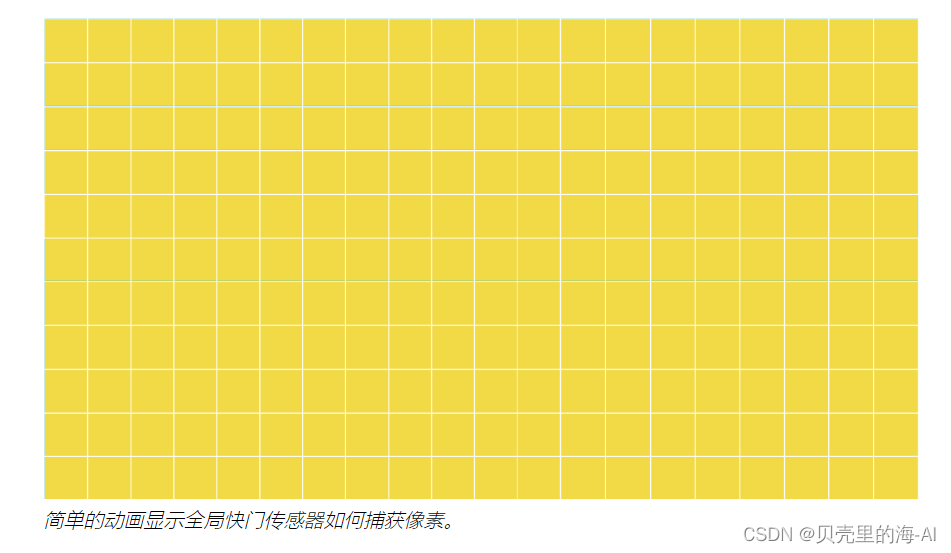
简单的动画显示全局快门传感器如何捕获像素。
在实践中,由于卷帘快门相机捕获的图像按时间略有划分,因此当场景中的某些物体快速移动时,可能会导致奇怪的图像伪影。在下图中,螺旋桨叶片扭曲,因为当成像传感器到达图像的不同部分时,螺旋桨已轻微移动。
英特尔实感 D435 深度摄像头的更宽视场使其更适合机器人和无人机导航等用例。更大的视场可以让您有更多的时间对障碍物做出反应,此外,如果您通过防止深度图像模糊来捕捉高速运动,则全局快门可以提供更好的性能。
英特尔实感深度摄像头 D455
D455 是加入立体深度系列的最新摄像头。如前所述,D455 将深度传感器之间的距离延长至 95 mm,从而将 4 m 处的深度 (Z) 误差*改善至小于 2%。D455 在 D435i 的设计上进行了改进,并进行了多项更改。与 D415/D435/D435i 相同的范围内,更宽的基线可提供更好的精度。
为了改善深度和 RGB 图像之间的对应性,RGB 传感器包含全局快门以匹配深度传感器上的全局快门。两个传感器现在都有 86° 的视野。这些更改使深度和 RGB 点更容易对齐。
与 D435i 一样,D455 还集成了 IMU,使您的应用程序能够在相机移动的任何情况下完善其深度感知。D455 通过 USB 3.1 连接供电,功耗与 D435i 类似。
英特尔实感模块差异
深度摄像头之间的另一个区别是,英特尔实感 D415 深度摄像头基于英特尔实感 D415 模块。这意味着成像器、发射器和 RGB 位于一块计算板或加强板上,从而使校准变得更加容易。D455 还将所有成像器、发射器和 RGB 传感器放置在同一个加强板上。
英特尔实感 D435 摄像头基于英特尔实感 D430 模块,并带有一个附加但独立的 RGB 摄像头。深度算法基于传感器的精确放置,因此不将它们固定在同一加强筋上可能会使深度和 RGB 之间的校准出现问题。然而,上一代相机的用户表示,他们确实希望能够灵活地选择自己的 RGB 传感器,因此 D435 诞生了,虽然使用这款相机同时精确校准颜色和深度数据更具挑战性,但仍然是可能的。
成像器差异和准确性
英特尔实感 D415 深度摄像头使用 2 兆像素成像器,而英特尔实感 D435 深度摄像头的成像器各为 1 兆像素。
最小 Z 差异
接下来,让我们比较“最小 Z”或从深度相机到被捕获物体的距离。与英特尔实感 D415 深度摄像头相比,英特尔实感 D435 深度摄像头在任何给定范围内都具有更多的深度噪声 (>2x),并且在相同分辨率下它的最小操作距离更小 (~0.5x),这意味着您可以获得离相机更近。例如,在 848 x 480 分辨率下,英特尔实感 D415 深度摄像头的最小 Z 约为 29 厘米,而英特尔实感 D435 深度摄像头的最小 Z 为 17 厘米。D455 在 4 m 处的深度误差小于 2%,最佳范围为 0.4 至 6 m。