数据并行
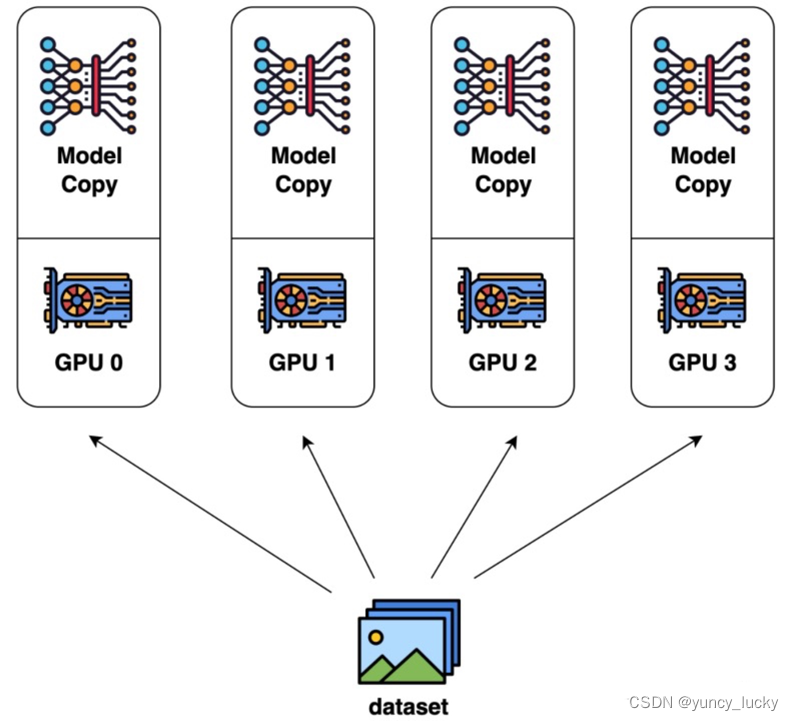
数据集分为n块,每块随机分配到m个设备(worker)中,相当于m个batch并行训练n/m轮,模型也被复制为n块,每块模型均在每块数据上进行训练,各自完成前向和后向的计算得到梯度,对梯度进行更新,更新后,再传回各个worker。以确保每个worker具有相同的模型参数。
三种主流数据并行的实现方式,详见:图解大模型训练之:数据并行上篇(DP, DDP与ZeRO) - 知乎
图解大模型训练之:数据并行下篇( DeepSpeed ZeRO,零冗余优化) - 知乎
下图1:每个设备分1份数据
下图2:每个设备分4份数据
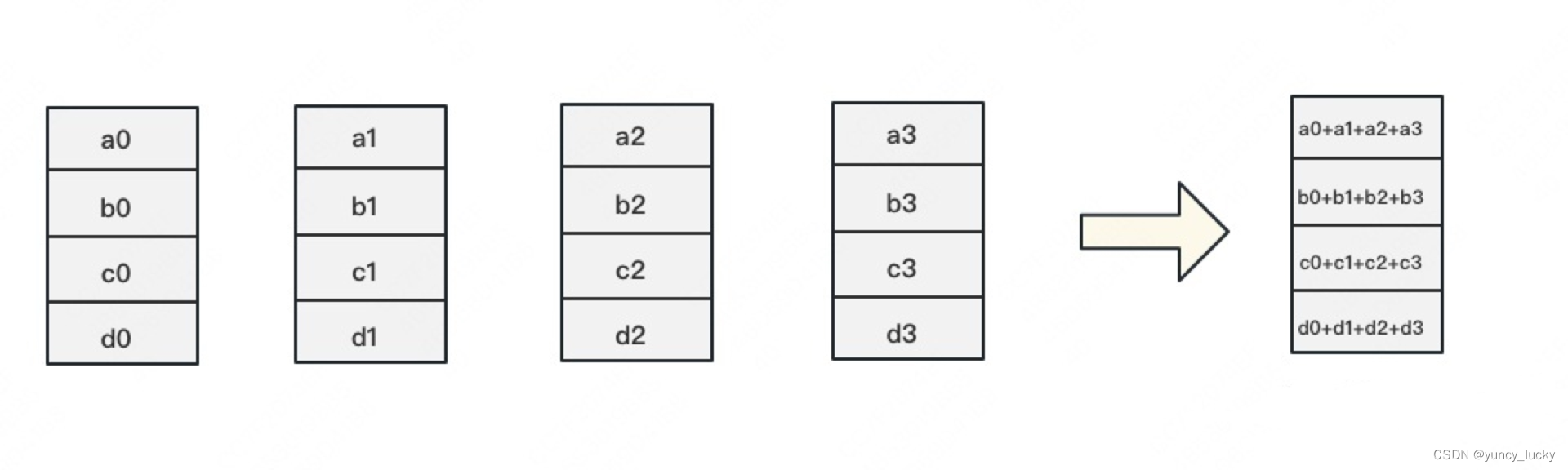
数据不切分的话,就是总共N-1次传输中每次传输数据大小为O(O是模型参数量),数据流转完整一圈仍然需要(N-1)*O的时间,传统参数服务器的总时间没区别了。如果每个GPU只和其相邻的两块GPU通讯,形成一个环,则单卡通讯量近似2*O,全卡近似为2*N*O。
数据并行中,每个GPU上都复制了一份完整模型,当模型变大时,很容易打爆GPU的显存,那要怎么办呢
模型并行
参考:
论文:https://arxiv.org/abs/1909.08053
[细读经典]Megatron论文和代码详细分析(1) - 知乎
图解大模型训练之:张量模型并行(TP),Megatron-LM - 知乎
由于模型巨大,无法装入单个GPU,此时需要模型并行。
模型并行是包含范围很广的一类技术。它会在多个 worker 之间划分模型的各个层。就其本质而言,模型并行性的计算和通信因模型结构而异,因此在实现上有很大的工作量。DeepSpeed 借用了英伟达的 Megatron-LM 来为基于 Transformer 的语言模型提供大规模模型并行功能。模型并行会根据 worker 数量成比例地减少显存使用量,也是这三种并行度中显存效率最高的。但是其代价是计算效率最低。
- 显存效率:模型并行会根据 worker 数量成比例地减少显存使用量。至关重要的是,这是减少单个网络层的激活显存的唯一方法。DeepSpeed 通过在模型并行 worker 之间划分激活显存来进一步提高显存效率。
- 计算效率:由于每次前向和反向传播中都需要额外通信激活值,模型并行的计算效率很低。模型并行需要高通信带宽,并且不能很好地扩展到通信带宽受限的节点。此外,每个模型并行worker 都会减少每个通信阶段之间执行的计算量,从而影响计算效率。模型并行性通常与数据并行性结合使用,以在内存和计算效率之间进行权衡。
在模型并行中,每个 GPU 仅处理张量的一部分,并且仅当某些算子需要完整的张量时才触发聚合操作。我们可以将其点积部分写为 Y=GeLU(XA) ,其中 X 和 Y 是输入和输出向量, A 是权重矩阵。
如果以矩阵形式表示的话,很容易看出矩阵乘法可以如何在多个 GPU 之间拆分:

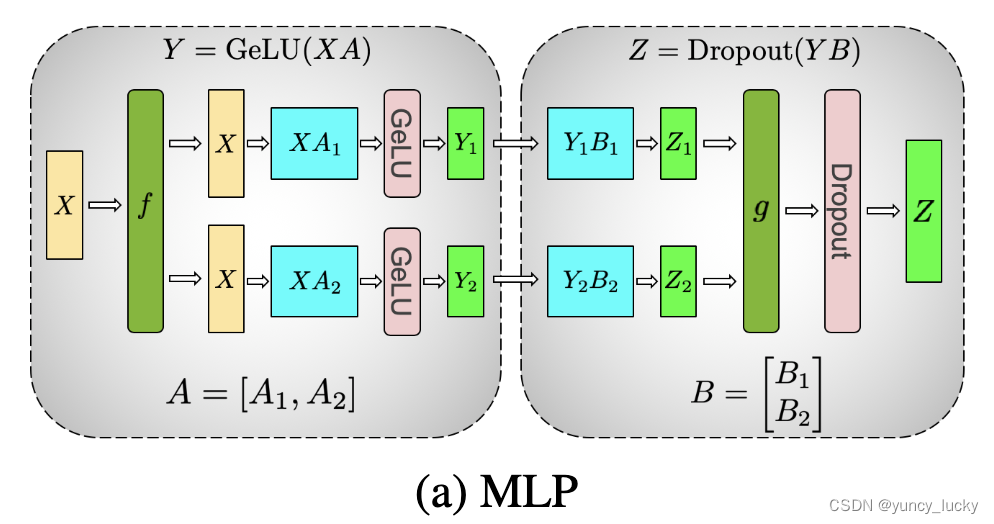
图a,对A采用列切割,对B采用行切割,这样设计的原因是,尽量保证各GPU上的计算相互独立,减少通讯量。对A来说,需要做一次GELU的计算,而GELU函数是非线形的,它的性质如下:

也就意味着,如果对A采用行切割,我们必须在做GELU前,做一次AllReduce,这样就会产生额外通讯量。但是如果对A采用列切割,那每块GPU就可以继续独立计算了。一旦确认好A做列切割,那么也就相应定好B需要做行切割了。
图b,左侧方框中的2个dropout,在初始化时需要用不同的随机种子。因为这样才等价于对完整的dropout做初始化,然后再切割。右侧方框中的dropout,需要用相同的随机种子(虽然右边只画了1个dropout,但其实是2个dropout,每块GPU上各一个,因为此时两块GPU上的输出已经AllReduce,是完全一致的。做完AllReduce后,两块GPU继续独立计算,因此实际上有两个dropout)。
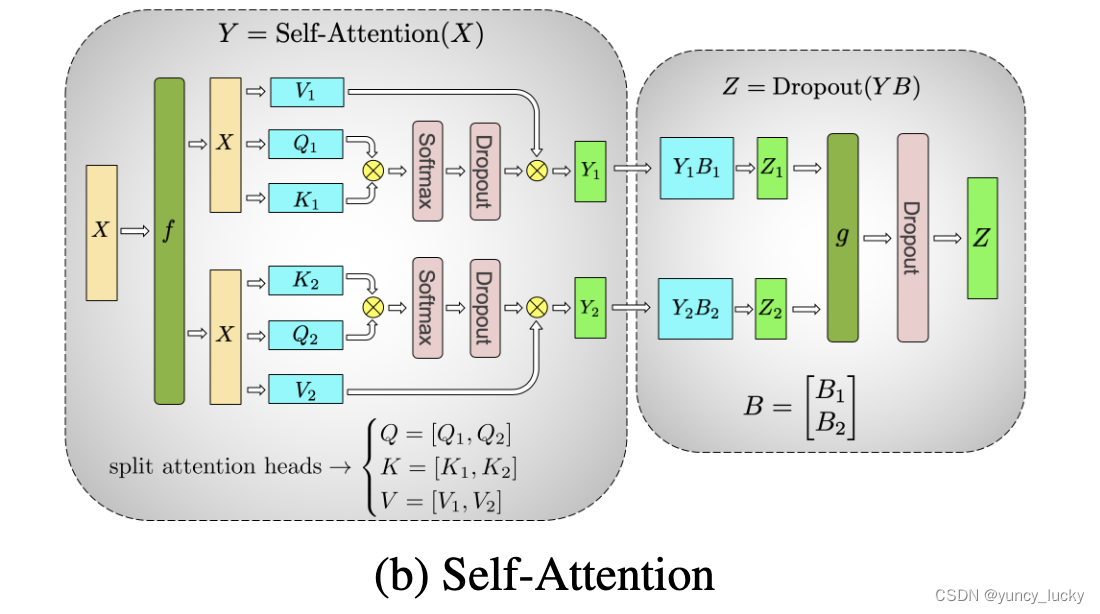
可以发现,attention的多头计算简直是为张量模型并行量身定做的,因为每个头上都可以独立计算,最后再将结果concat起来。也就是说,可以把每个头的参数放到一块GPU上。
对三个参数矩阵Q,K,V,按照“列切割”,每个头放到一块GPU上,做并行计算。对线性层B,按照“行切割”。切割的方式和MLP层基本一致,其forward与backward原理也一致,这里不再赘述。
最后,在实际应用中,并不一定按照一个head占用一块GPU来切割权重,我们也可以一个多个head占用一块GPU,这依然不会改变单块GPU上独立计算的目的。所以实际设计时,我们尽量保证head总数能被GPU个数整除。
流水线并行(Pipeline Parallelism)
参考:
图解大模型训练之:流水线并行(Pipeline Parallelism),以Gpipe为例 - 知乎
【深度学习】【分布式训练】一文捋顺千亿模型训练技术:流水线并行、张量并行和3D并行 - 知乎
朴素的模型并行存在GPU利用度不足,中间结果消耗内存大的问题。而Gpipe提出的流水线并行,就是用来解决这两个主要问题的。
流水线并行的核心思想是:在模型并行的基础上,进一步引入数据并行的办法,即把原先的数据再划分成若干个batch,送入GPU进行训练。未划分前的数据,叫mini-batch。在mini-batch上再划分的数据,叫micro-batch。
终:
假设我们有2台机器(node0和node1),每台机器上有8块GPU,GPU的编号为0~15。
我们使用这16块GPU,做DP/TP/PP混合并行,如下图:
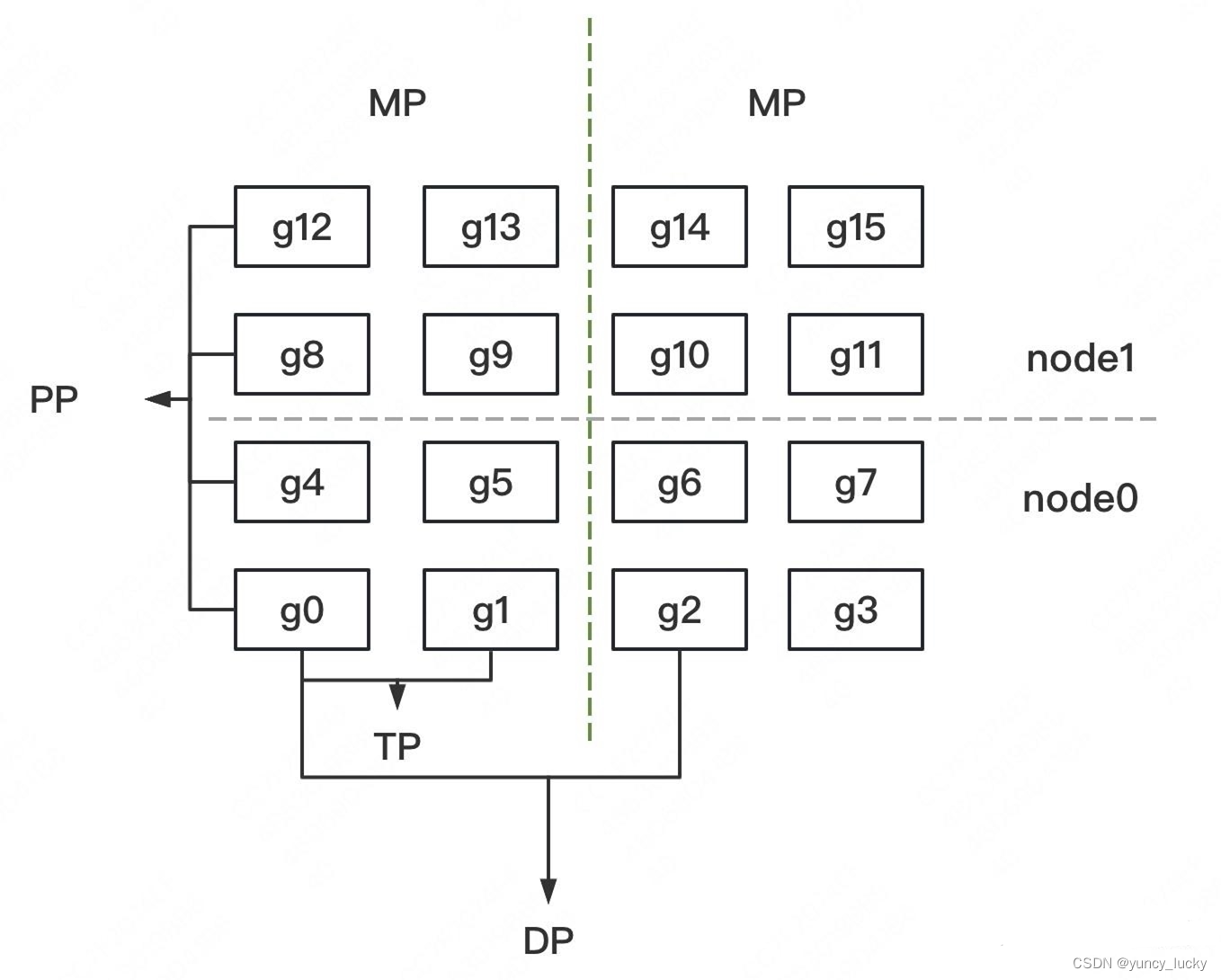
- MP:模型并行组(Model Parallism)。假设一个完整的模型需要布在8块GPU上,则如图所示,我们共布了2个model replica(2个MP)。MP组为:
[[g0, g1, g4, g5, g8, g9, g12, g13], [g2, g3, g6, g7, g10, g11, g14, g15]] - TP:张量并行组(Tensor Parallism)。对于一个模型的每一层,我们将其参数纵向切开,分别置于不同的GPU上,则图中一共有8个TP组。TP组为:
[[g0, g1], [g4, g5],[g8, g9], [g12, g13], [g2, g3], [g6, g7], [g10, g11], [g14, g15]] - PP:流水线并行组(Pipeline Parallism)。对于一个模型,我们将其每一层都放置于不同的GPU上,则图中一共有4个PP组。PP组为:
[[g0, g4, g8, g12], [g1, g5, g9, g13], [g2, g6, g10, g14], [g3, g7, g11, g15]] - DP:数据并行组(Data Parallism)。经过上述切割,对维护有相同模型部分的GPU,我们就可以做数据并行,则图中共有8个DP组。DP组为
[[g0, g2], [g1, g3], [g4, g6], [g5, g7], [g8, g10], [g9, g11], [g12, g14], [g13, g15]]