PWM简介
PWM(Pulse Width Modulation)是脉冲宽度调制的缩写,是一种利用微处理器的数字输出来对模拟电路进行控制的技术。PWM的原理是
通过调节占空比来调节脉冲宽度,从而改变输出电压的大小。波形图如下

PWM的两个重要参数为频率和占空比。频率是周期的导数即 f = 1 / T f=1/T f=1/T,占空比是指脉宽时间占周期的比例。
STM32中用定时器来输出PWM,其原理图如下

定时器重复计数从0到ARR,设定比较值为CCRx,当定时器的计数值向上计数到和CCRx的值相等时,对应波形输出管脚电瓶翻转,
当定时器计数值计到ARR时,输出管脚波形再次翻转。从图中可以看出,定时器的一个计时周期对应一个 PWM周期,脉宽(高电平的宽
度)需要根据输出管脚的初始电平的不同或者为0—CCRx这一段,或者为CCRx—ARR,这一段。改变CCRx的值即可实现脉宽的控制。
PWM频率和占空比的影响因素有:
- ARR :决定PWM周期(在系统时钟频率固定的情况下)
- CCRx:决定PWM占空比(高低电平所占整个周期比例)
硬件
- stm32f103c8t6
- tb6612fng
- 直流电机
| 硬件 | 引脚 | 作用 |
|---|---|---|
| 电机1A | PB12 | 普通IO |
| 电机1B | PB13 | 普通IO |
| 电机2A | PB14 | 普通IO |
| 电机2B | PB15 | 普通IO |
| PWMA | PA6 | TIM3_CH1 |
| PWMB | PA7 | TIM3_CH2 |
软件
STM32CubeMX
- RCC->HSE->Crystal/Ceramic Resonator
- SYS->Debug->Serial Wire
- GPIO

- TIM3->Channel1->PWM Generation CH1
- TIM3->Channel2->PWM Generation CH1
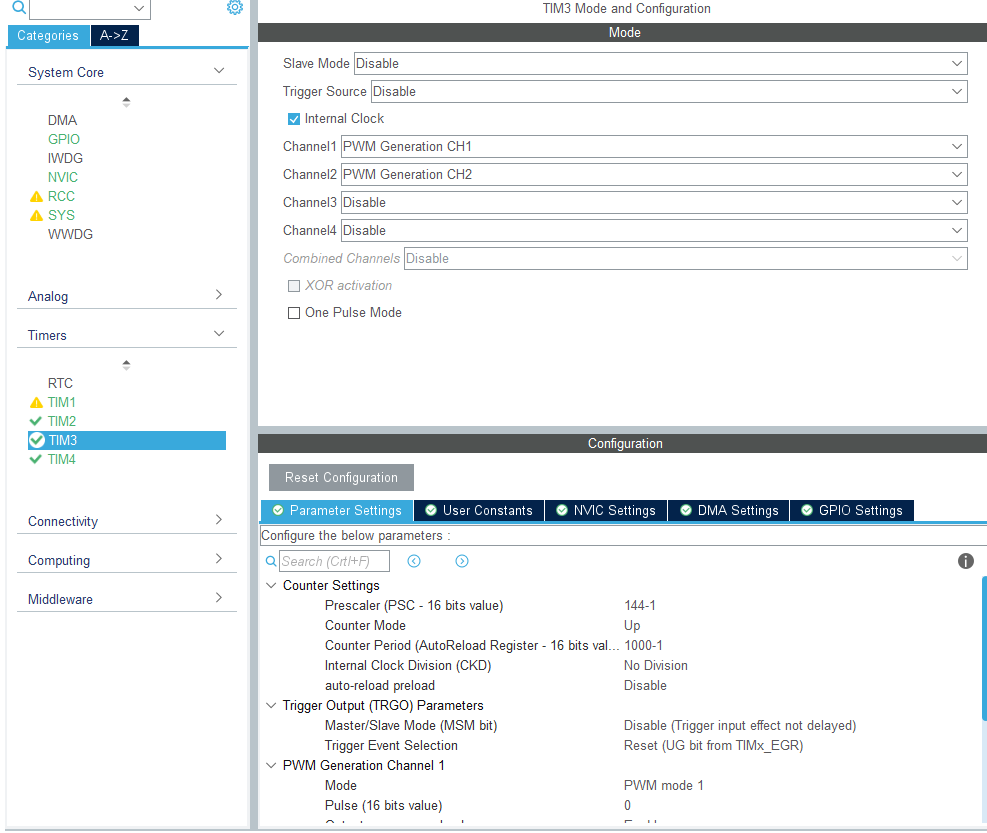
预分频系数(PSC)设置为144-1,自动重装载值为1000-1,PWM模式1,向上计数,则计时器时钟频率为 72 M / 1440 / 1000 = 500 H z 72M/1440/1000=500Hz 72M/1440/1000=500Hz,周期为 T = 1 / 500 = 2 m s T=1/500=2ms T=1/500=2ms
- Clock Configuration->HCLK->72
- GRNRATE CODE
CLion
在Core/Inc新建motor.h
#ifndef STM32_MOTOR_H
#define STM32_MOTOR_H
#include "main.h"
#include "tim.h"
#define AIN1_RESET HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_RESET)
#define AIN2_RESET HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_RESET)
#define AIN1_SET HAL_GPIO_WritePin(AIN1_GPIO_Port, AIN1_Pin, GPIO_PIN_SET)
#define AIN2_SET HAL_GPIO_WritePin(AIN2_GPIO_Port, AIN2_Pin, GPIO_PIN_SET)
#define BIN1_RESET HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_RESET)
#define BIN2_RESET HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_RESET)
#define BIN1_SET HAL_GPIO_WritePin(BIN1_GPIO_Port, BIN1_Pin, GPIO_PIN_SET)
#define BIN2_SET HAL_GPIO_WritePin(BIN2_GPIO_Port, BIN2_Pin, GPIO_PIN_SET)
void Limit_PWM(int *motorA, int *motorB);
void Load_PWM(int Left_Motor, int Right_Motor);
#endif /* MOTOR_MOTOR_H_ */
在Core/Inc新建motor.c
#include "motor.h"
/**
* @brief 控制电机进行正转、反转、停止
* @param None
* @retval None
*/
void LeftMotor_Go() //左电机正转 AIN输出相反电平 BIN也输出相反电平
{
AIN1_RESET;
AIN2_SET;
}
void LeftMotor_Back() //左电机反转
{
AIN1_SET;
AIN2_RESET;
}
void LeftMotor_Stop() //左电机停止 AIN和BIN输出相同电平
{
AIN1_RESET;
AIN2_RESET;
}
void RightMotor_Go() //右电机正转 AIN输出相反电平 BIN也输出相反电平
{
BIN1_SET;
BIN2_RESET;
}
void RightMotor_Back() //右电机反转
{
BIN1_RESET;
BIN2_SET;
}
void RightMotor_Stop() //右电机停止 AIN和BIN输出相同电平
{
BIN1_RESET;
BIN2_RESET;
}
/**
* @brief 绝对值
* @param int整数
* @retval int整数的绝对值
*/
int GFP_Abs(int p)
{
int q;
q=p>0?p:(-p);
return q;
}
/**
* @brief 控制电机进行PWM限速
* @param 左右电机的PWM值
* @retval None
*/
void Limit_PWM(int *motorA, int *motorB)
{
if(*motorA>PWM_MAX) *motorA=PWM_MAX;
if(*motorA<PWM_MIN) *motorA=PWM_MIN;
if(*motorB>PWM_MAX) *motorB=PWM_MAX;
if(*motorB<PWM_MIN) *motorB=PWM_MIN;
}
/**
* @brief 控制电机进行速度方向控制
* @param 左右电机的PWM值
* @retval None
*/
void Load_PWM(int Left_Motor, int Right_Motor)
{
if(Left_Motor>0) LeftMotor_Go();
else LeftMotor_Back();
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_2, GFP_Abs(Right_Motor));
if(Right_Motor>0) RightMotor_Go();
else RightMotor_Back();
__HAL_TIM_SET_COMPARE(&htim3, TIM_CHANNEL_1, GFP_Abs(Left_Motor));
}
main.c
/* USER CODE BEGIN Includes */
#include "motor.h"
/* USER CODE END Includes */
int PWM_MAX = 1000, PWM_MIN = -1000;
void SystemClock_Config(void);
int main(void)
{
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Load_PWM(800, 800);
HAL_Delay(2000);
Load_PWM(500, 500);
HAL_Delay(2000);
Load_PWM(-800, -800);
HAL_Delay(2000);
Load_PWM(0, 0);
HAL_Delay(2000);
}
/* USER CODE END 3 */
}