随着高阶智驾从高端车型逐步下沉中低价位市场,核心传感器,尤其是激光雷达和4D成像毫米波雷达的目标市场也在寻求分层和融合。
“激光雷达是在自动驾驶出现后才崭露头角。在这些系统开发的早期阶段,很多公司不惜一切代价使传感器尽可能强大。但进入下半场的竞争,重点转向创造有形价值。”傲图科技的创始人及CEO牛力表示。
上周,8月15日,4D成像雷达初创公司—傲图科技宣布完成种子轮融资(数百万美金),其中,激光雷达上市公司—禾赛科技CEO及创始人李一帆作为个人股东参与,本轮融资将用于加速产品研发和大规模商业落地。
这家公司的产品方案特点之一,就是降本。
众所周知,目前中国市场仅有采埃孚、森思泰克、福瑞泰克三家供应商实现4D成像雷达的前装量产落地,但上车规模还远不及成本更高的激光雷达。
一方面,相比于传统3D毫米波雷达,在硬件架构、软件算法以及多感知前融合方面,4D成像雷达的技术成熟度还未达到规模化的「甜蜜点」。
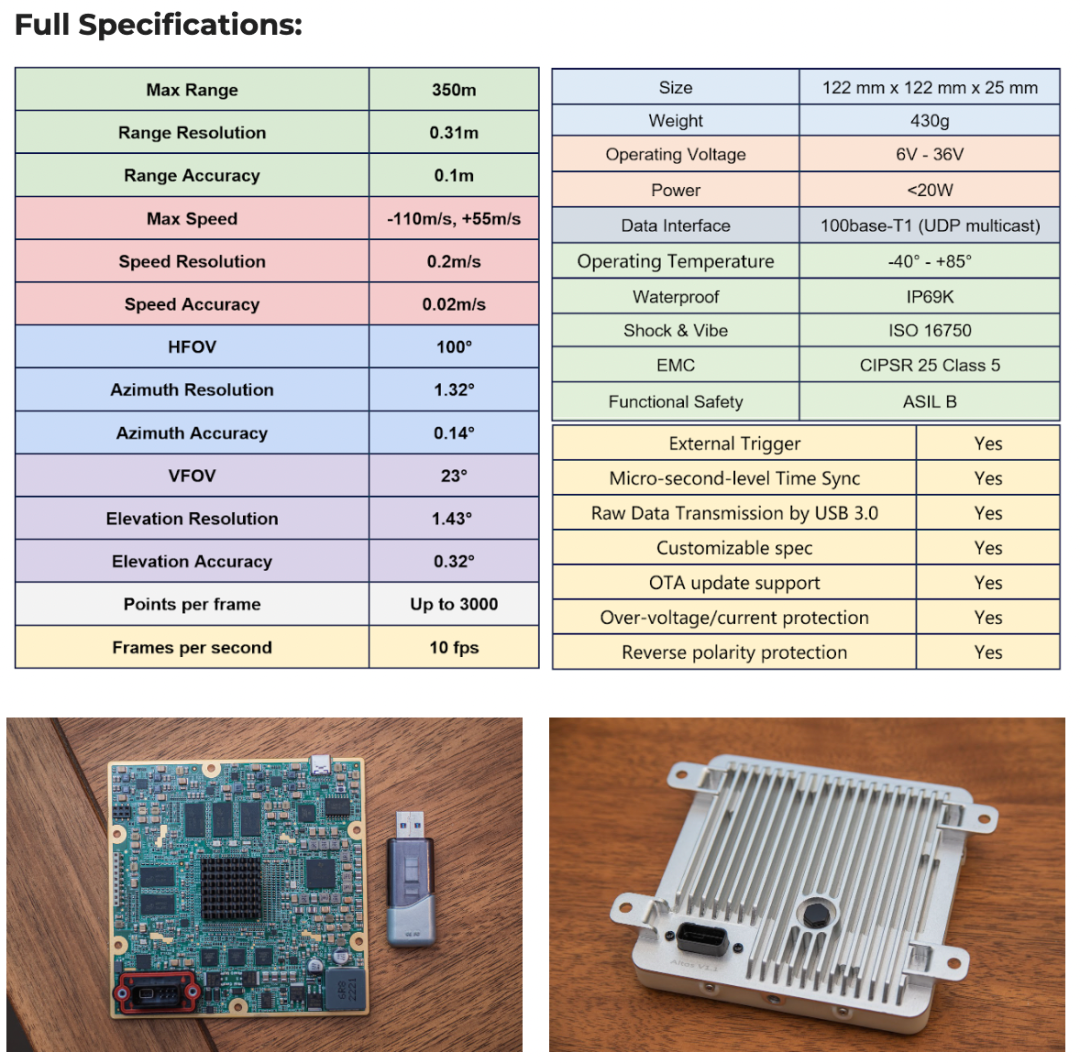
为此,傲图科技给出的方案是:通过4片级联(12TX+16RX)+车规廉价SOC计算芯片(替代大部分同行采用的FPGA)的方案,结合底层计算构架的优化能力以及高效的信号处理算法。
进度条,百分之6
视频:傲图4D雷达与禾赛AT128激光雷达对标
另一方面,对于激光雷达来说,高阶智驾搭载车型价位的下探,车企倾向于优先拿掉激光雷达。「相比于城区NOA,高速场景无论是可靠性、安全性都要相对成熟。」
本月初,理想热销车型L9,推出了L9 Pro版本。相比于激光雷达版本的L9 Max,仅保留了摄像头和前向4D毫米波雷达,芯片从英伟达替换为地平线,新车价格下调3万元。
此外,蔚来汽车也在今年早些时候宣布,将于NXP合作联合研发4D毫米波雷达,从而增强现有感知系统的环境映射和场景理解能力,并且不受天气或光照条件的影响。
而从数据来看,目前,不管是带有变道辅助的L2,还是NOA,标配车型价位下沉的速度有多快,就意味着,智能驾驶规模化效应能否预期释放。
高工智能汽车研究院监测数据显示,2023年1-6月中国市场(不含进出口)乘用车前装标配搭载L2(含L2+)交付新车324.35万辆,同比增长37.65%;前装标配搭载率为34.90%。
其中,非NOA的变道辅助占L2(含L2+)总交付量的8.34%,搭载新车交付均价为34.27万元;NOA占比6.53%,搭载新车交付均价为38.04万元;
此前,李一帆在接受公开采访时表示,激光雷达比较难打入的是售价20万以下的中低端电动车市场,因为不是主要配置;但在20万-30万区间甚至更高售价的电动车产品,激光雷达是主打卖点。
而此次作为个人股东涉足4D毫米波雷达,李一帆或许不只是为激光雷达做一个市场「对冲」,另一层含义可能是在4D感知层面增强融合性能。
作为目前全球激光雷达前装量产交付规模的排头兵,禾赛科技及创始人的产业布局,无疑也传递出行业背后的新动向。
实际上,在过去一年多时间,多家激光雷达公司都在陆续推出针对盲区应用的固态激光雷达,一方面,通过降本来实现更大规模的上车;另一方面,则是完成360度环绕感知的能力构建。
在高工智能汽车研究院看来,单一传感器的硬件研发、制造门槛已经大幅下降。比如,在毫米波雷达领域,不少车企也已经涉足。但对于多传感器的产品组合,依然还有不低的门槛。
在业内人士看来,多感知融合,如果是来自不同供应商的产品,在后续系统开发过程中还有很多协同工作。而全栈感知,意味着很多融合的工程开发可以前置,对于车企来说,也是一种降本。
比如,对于面向高阶自动驾驶的感知配置,在Mobileye看来,基于摄像头的纯视觉感知与4D成像雷达+激光雷达融合感知两套方案应该并行,才是真正的冗余。
首先,摄像头是被动传感器,而不管毫米波雷达还是激光雷达,都属于动传感器,从融合层面来说,更具优势。而更关键的是,FMCW。
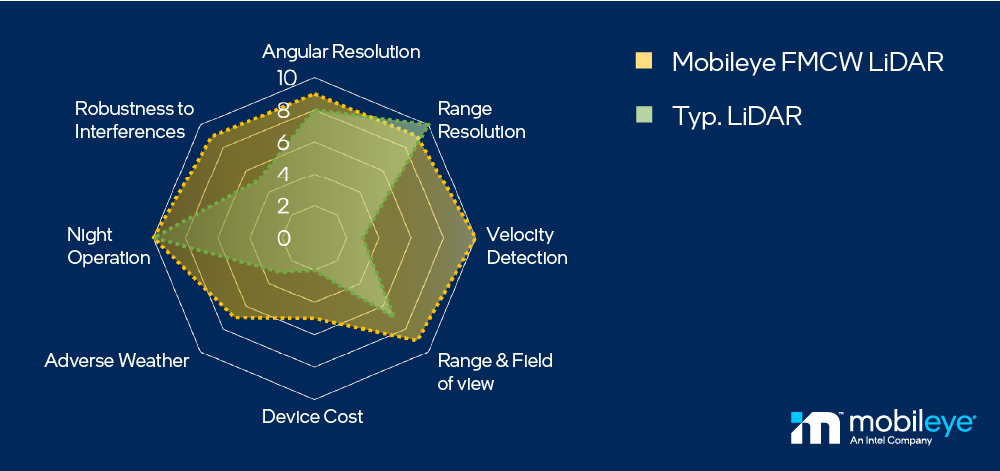
以目前主流激光雷达测距方式(ToF)为例,FMCW在抗干扰、探测距离、固态兼容性、毫米波雷达兼容性、是否含有速度信息等方面存在巨大优势。而FMCW也是毫米波雷达的测距测速方式。
这意味着,由于FMCW可以直接测量速度信息以及抗干扰,可以实现4D成像雷达和激光雷达的有效感知融合,进一步提升置信度。
在禾赛科技的招股说明书中这样写道:ToF是目前市场车载中长距激光雷达的主流方案,未来随着FMCW激光雷达整机和上游产业链的成熟,ToF和FMCW激光雷达将在市场上并存。
同时,硅基光电子技术应用到FMCW系统可以很大程度减小光学信号处理模块的尺寸并降低功耗,提升系统的性能、集成度、一致性与可靠性。此外,成熟的CMOS工艺保证了集成方案可以低成本量产。
而在行业内,大部分人也把FMCW激光雷达定义为4D激光雷达雷达,除了传统激光雷达可以检测三维位置外,还可以检测每个扫描点的瞬时速度的第四维。同时,输出的原始4D数据提供实时相机级图像,每帧多达1000行,静态场景无运动模糊。
比如,此前Aeva自研的硅光子芯片模组,将激光发射器、光学器件和接收器进行了片上集成(半导体成熟工艺),实现成本、体积的最优化。
尽管与目前市面上的激光雷达方案相比,FMCW通常被认为是一种更复杂、更不成熟的技术,但已经有了越来越多的支持者。
同样布局FMCW激光雷达赛道的,还有Mobileye。作为目前行业内为数不多同时布局4D成像雷达和FMCW激光雷达的企业,也有着自己的看法。
在Mobileye创始人、CEO Amnon Shashua看来,整个激光雷达行业都将走向FMCW。「在当下这个时间点来看,这是一件难而正确的选择」。而除了技术性能之外,成本被视为前装量产的规模化关键要素。
比如,由于组件和系统架构的特点,FMCW激光雷达比ToF更容易把核心元器件集成到半导体封装(PIC+ASIC),并实现晶圆级的封装和测试,从而大幅降低激光雷达核心部件的成本(可以参照半导体行业的成本曲线)。
此外,NVIDIA高级工程副总裁gary Hicok表示,除了即时速度检测,FMCW激光雷达还具有4D感知功能,可提供传统激光雷达无法实现的新功能,包括超分辨率和4D定位(可以替代目前的IMU,降低车企的成本)。
4D成像雷达+FMCW激光雷达,就是Mobileye给出的解决方案。
原因是,除了测距范围、仰角和方位采样能力之外,FMCW还增加了速度的直接获取(与毫米波雷达一样的实时多普勒测速)。这意味着,两者同时实现对更远的距离探测、快速识别小而快速(移动)的目标。
而已经对外发布自研4D毫米波雷达的特斯拉,旗下Autopilot硬件设计团队也在陆续引进激光雷达行业相关人才;比如,从Aeva、Aurora(旗下子公司研发FMCW激光雷达)等公司跳槽的研发工程师。
在高工智能汽车研究院看来,随着下一代传感器技术逐步成为市场主流,智能驾驶感知组合的多元化也在帮助高阶智驾能够覆盖更多的价位区间车型。而对于传感器厂商来说,也需要提前布局。