第二章
第五章
第六章
第七章
第八章
第九章
第十章
考点
条件编译
volatile、static、 union、 struct、 const指针
堆与栈的不同点
3.功能模块应用题
(1) GPIO 的应用:流水灯的电路及软件编码、驱动数码管的电路及编码。
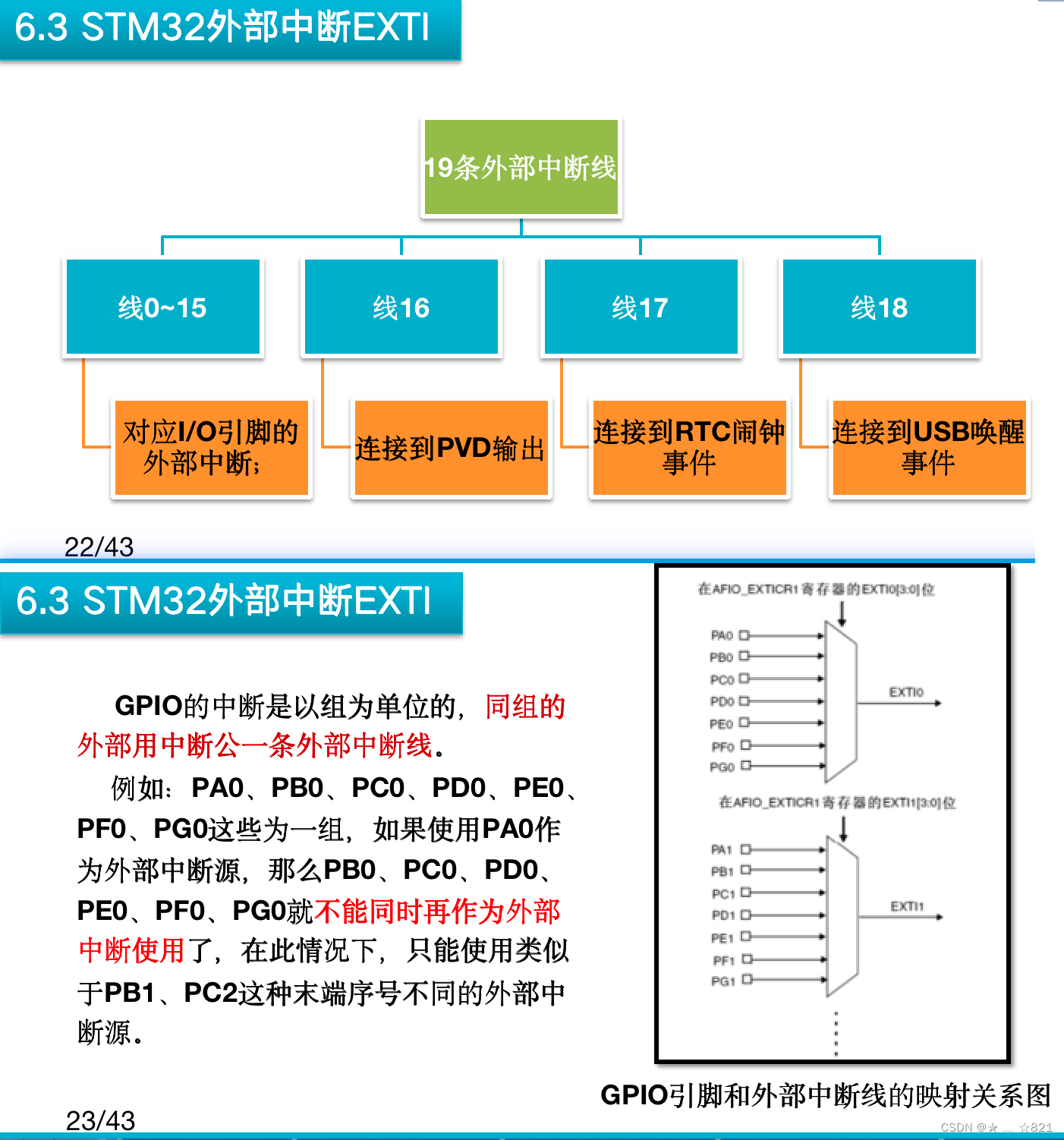
(2)外部中断的应用:电路及回调函数编码。
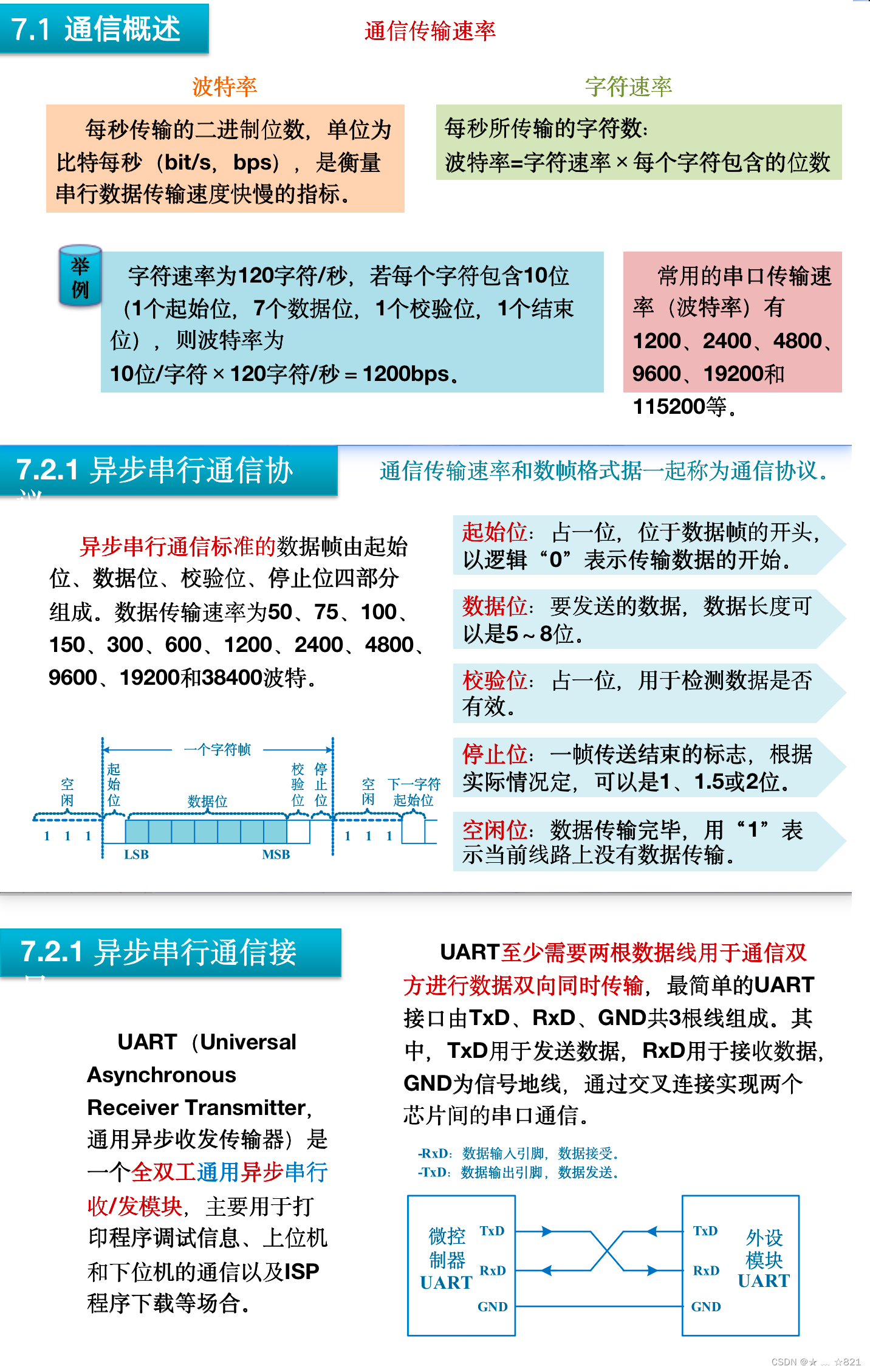
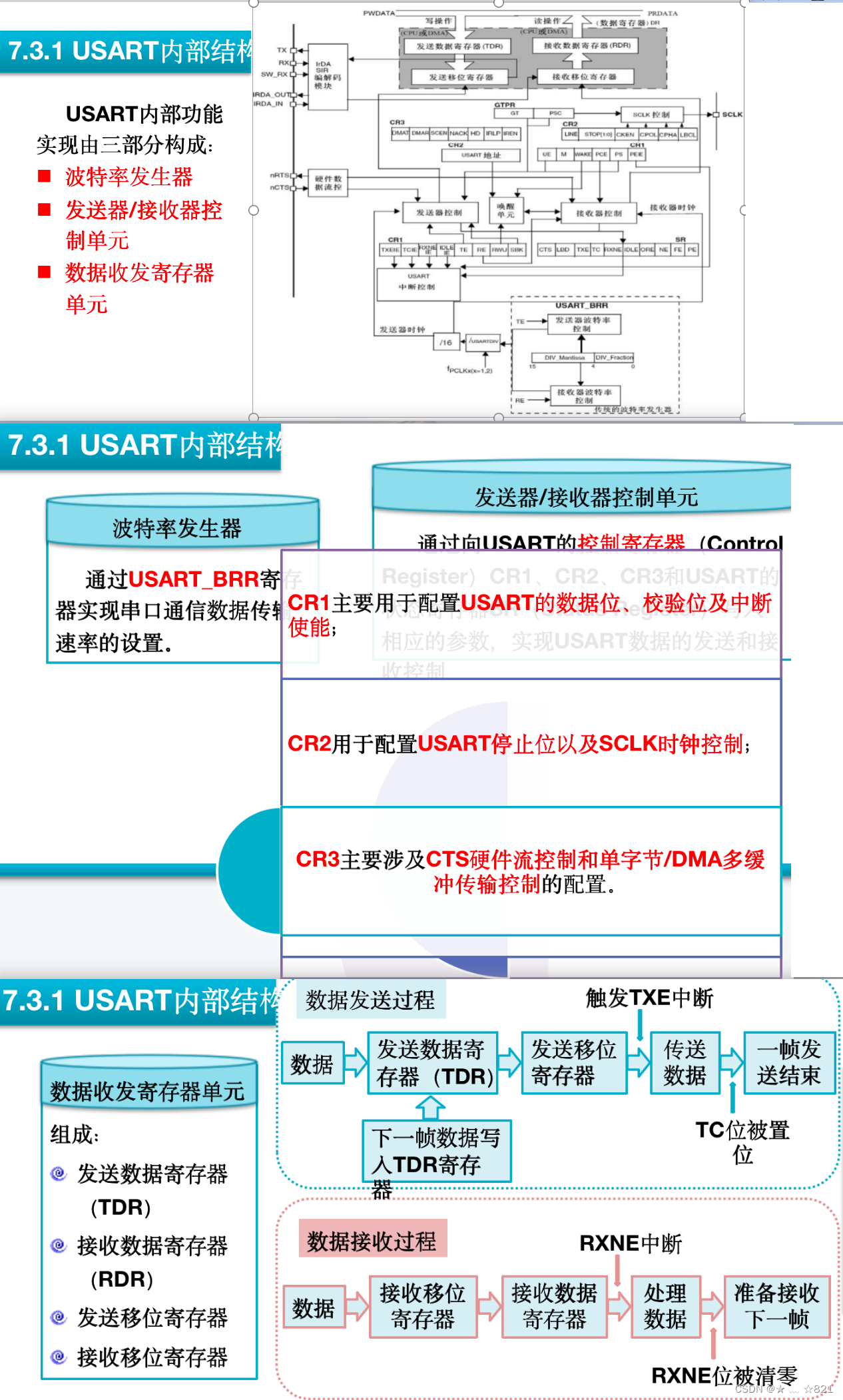
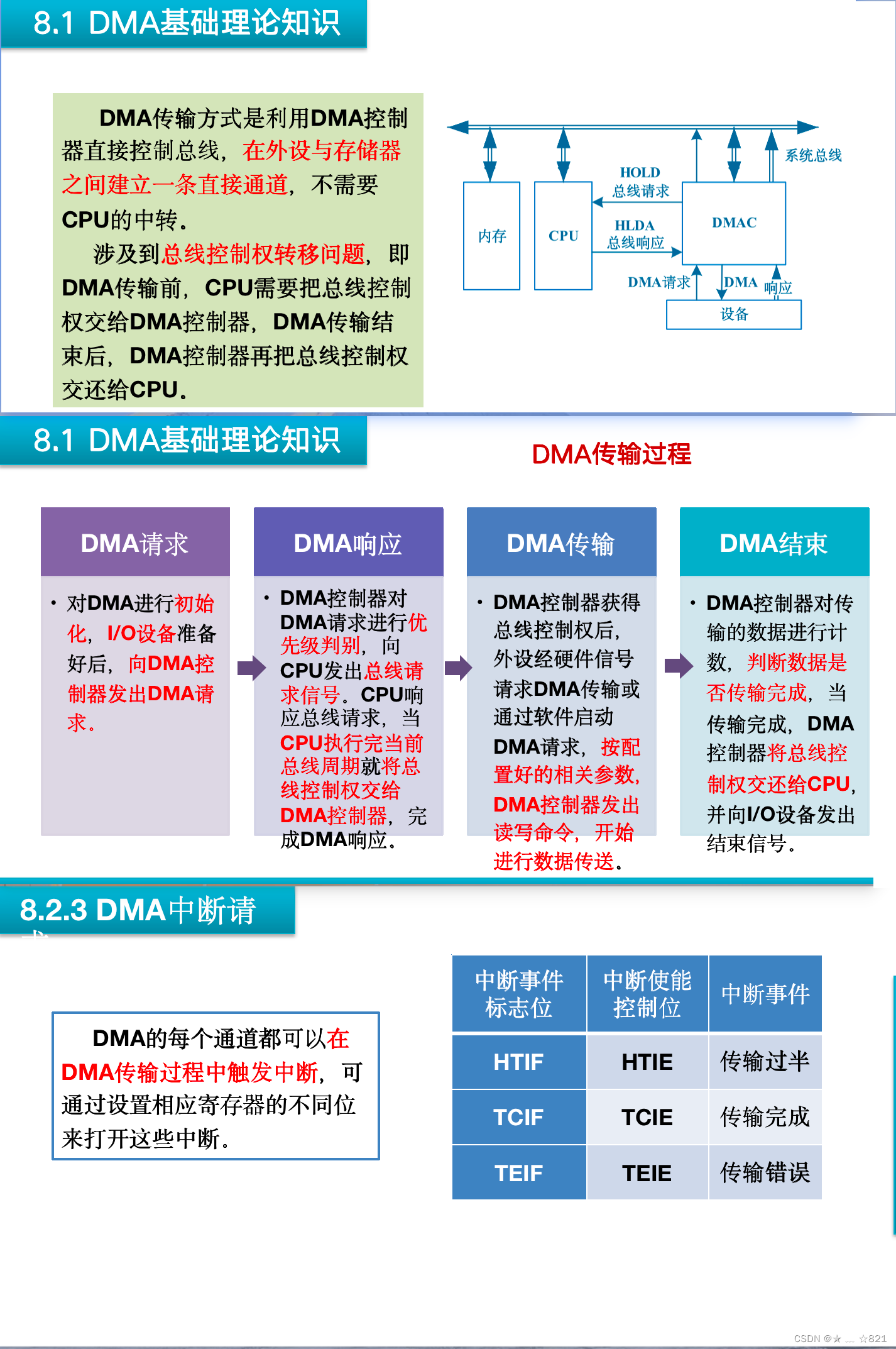
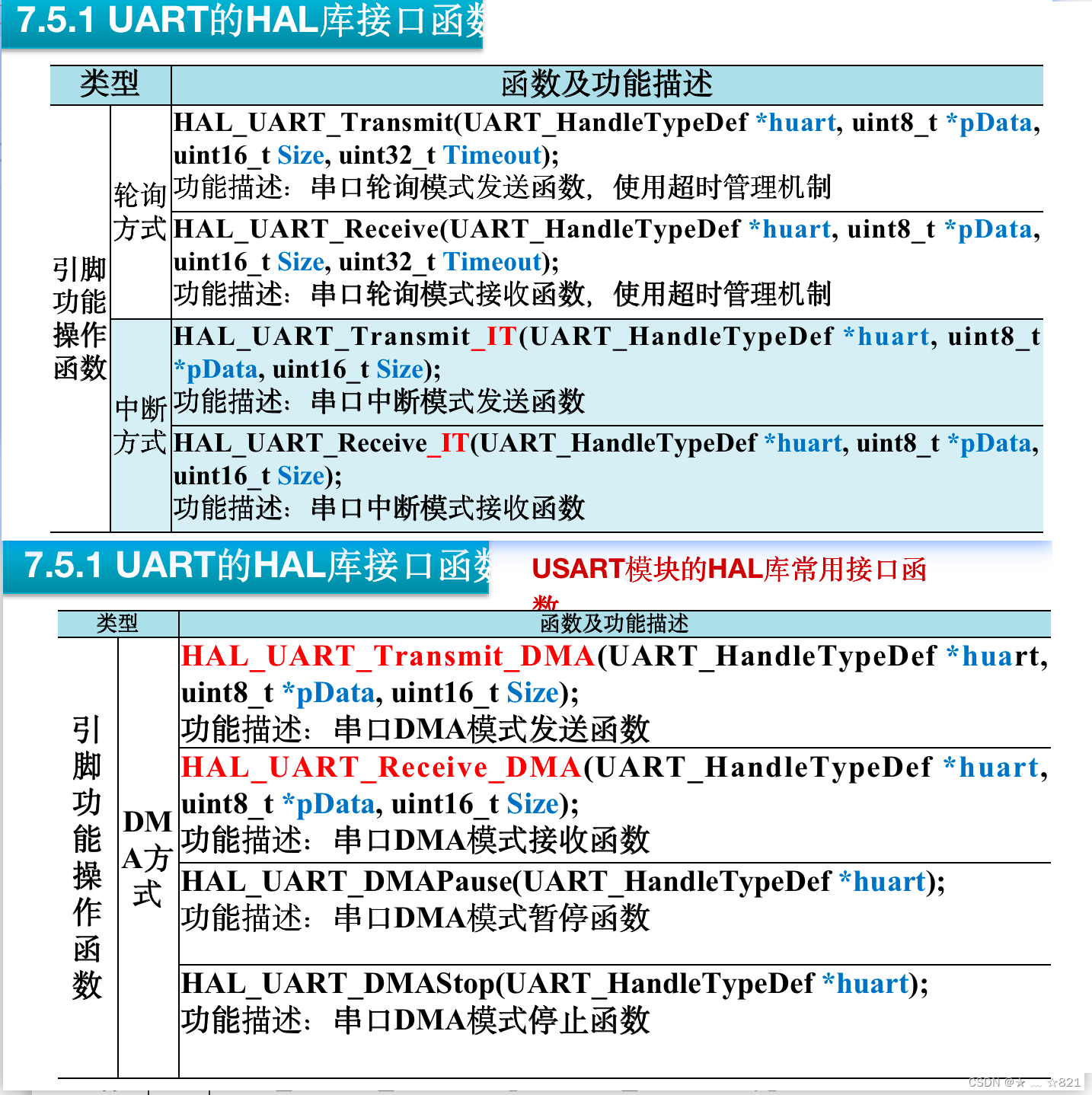
(3) USART 应用:以某种数据帧格式实现轮询、中断及DMA方式的数据发送及接收,包括使用STM32CubeMX进行USART1配置的大致过程、补充代码。
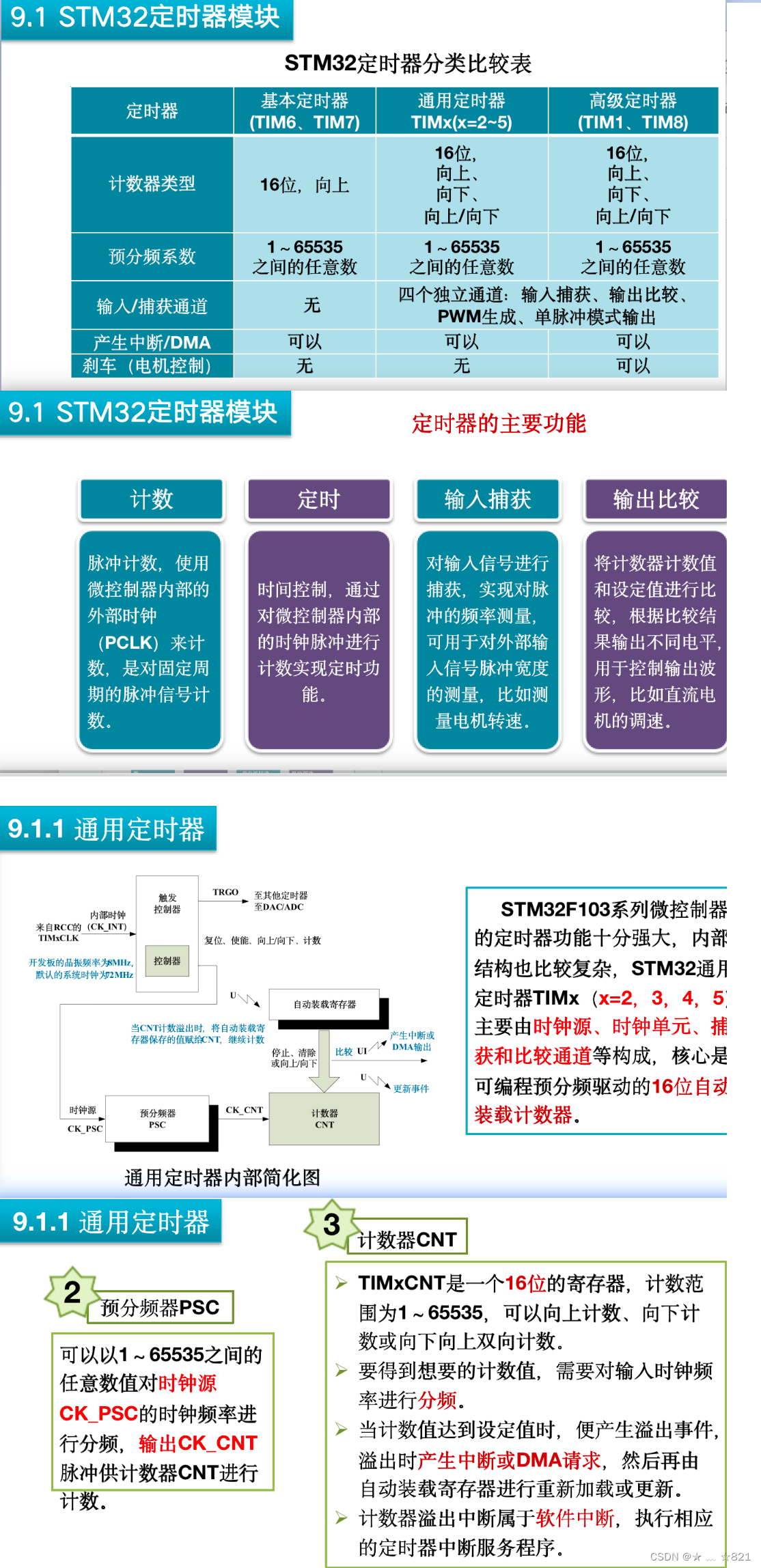
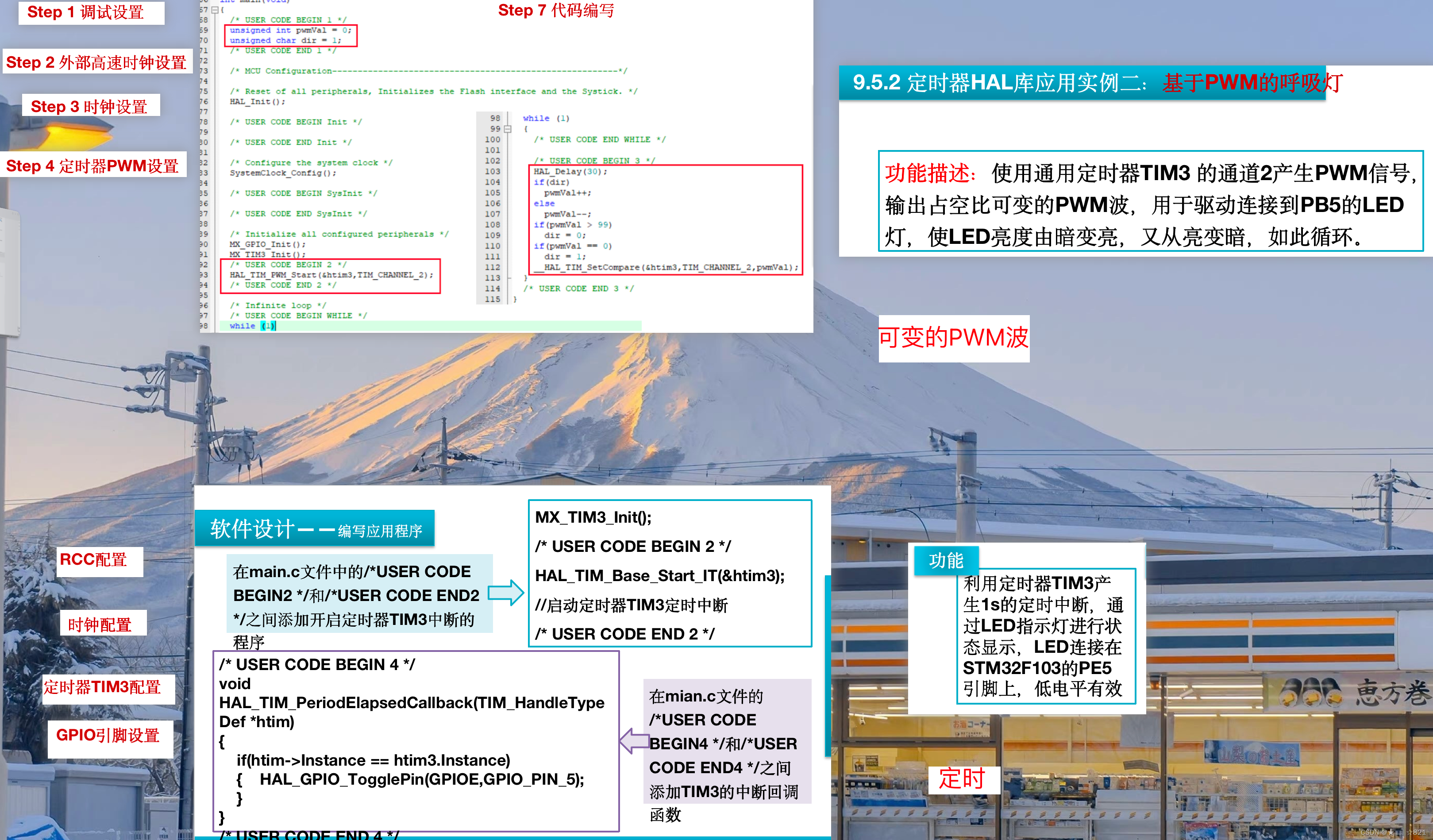
(4)定时器的应用:用定时器产生周期和占空比可变的PWM信号、定时点亮LED。
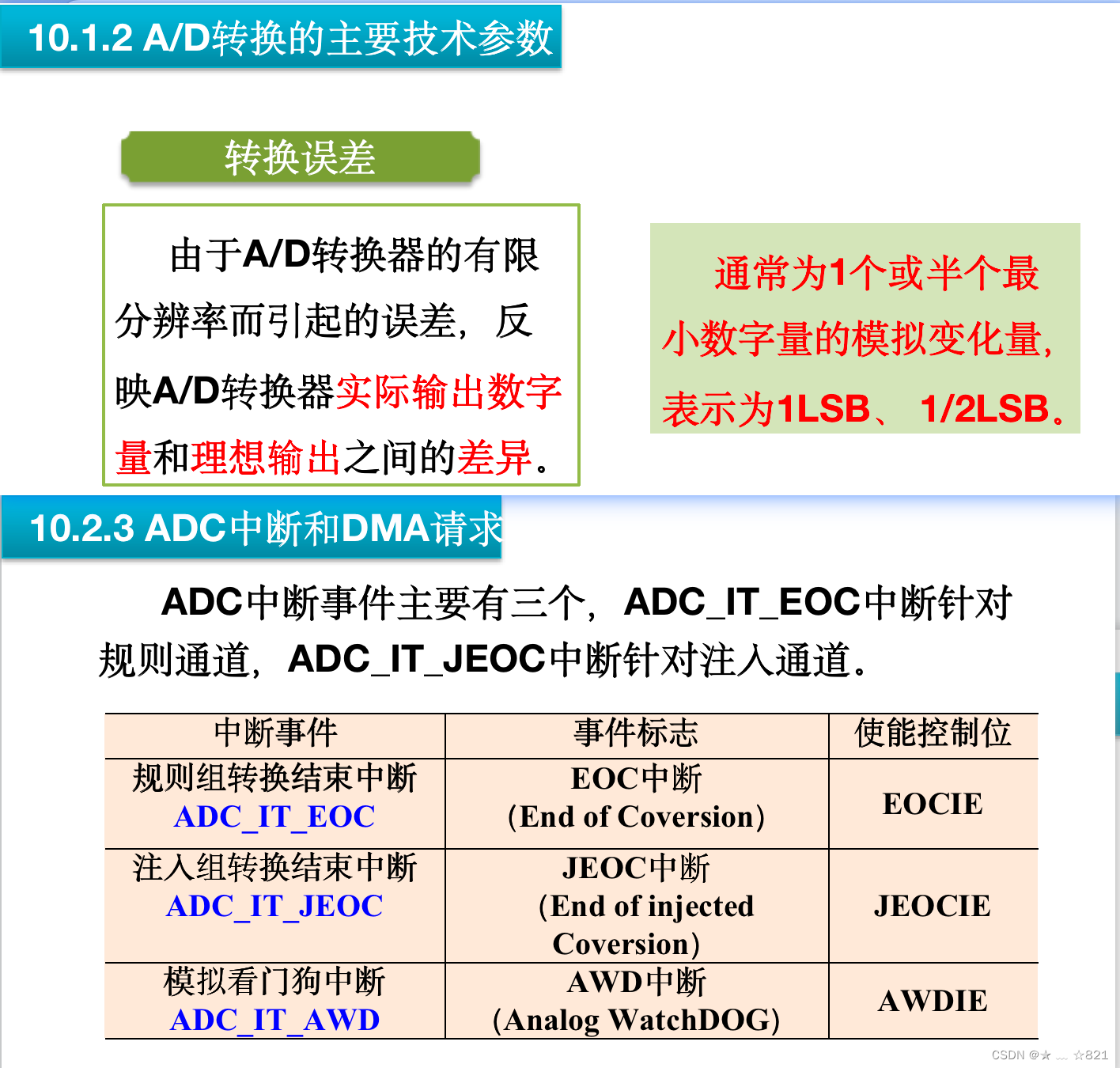
(5) ADC的应用:采集2路模拟信号。
4.综合应用题
(1)综合运用定时器、ADC和GPIO。用定时器实现定时启动ADC,用GPIO控制的数码管显示ADC的采集值。
(2)综合运用定时器、ADC 和UART。用定时器实现定时启动ADC,用UART发送ADC的采集值。
3(1)
题目:(1) GPIO 的应用:流水灯的电路及软件编码、驱动数码管的电路及编码。
以下是一个简单的流水灯电路设计示例:
电路设计:
使用多个LED灯(如4个)连接在一起,按顺序排列形成一条线。
每个LED灯通过一个限流电阻与正向电压源相连。
每个LED灯的负极通过一个开关或晶体管控制引脚与控制器相连。
软件编码:
在微控制器中,使用编程语言(如C语言)编写程序来控制流水灯的流动效果。
以下是一个简单的流水灯的软件编码示例:
#include <stdio.h>
#include "stm32f4xx.h"
int main(void) {
// 初始化LED灯引脚为输出
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
while (1) {
// 依次点亮LED灯
for (int i = 0; i < 4; i++) {
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2 | GPIO_PIN_3, (1 << i));
HAL_Delay(500); // 延时500毫秒
}
}
}
以上代码假设LED灯的引脚连接到STM32微控制器的GPIOD引脚0、1、2和3上。程序中使用循环依次点亮LED灯,通过延时函数控制灯的亮灭和流动效果。
关于数码管的电路设计和编码方式,需要进一步明确数码管的类型和接口(如共阳/共阴、七段数码管/八段数码管等),以及使用的控制器(如74HC595移位寄存器、MAX7219驱动芯片等)。
一般而言,数码管的电路设计包括将数码管引脚连接到相应的IO引脚或驱动芯片上,并通过编程来控制数码管的显示。
编码方式根据数码管类型的不同而异,常见的编码方式有直接编码、译码器编码、位选编码等。具体的编码方式取决于数码管的类型和所使用的驱动芯片。
请提供更详细的信息,例如数码管的类型和所使用的控制器,以便提供更具体的电路和编码示例。
3(2)
题目:(2)外部中断的应用:电路及回调函数编码。
外部中断的应用可以用于检测外部事件(如按钮按下、传感器触发等)并进行相应的处理。以下是一个基于STM32系列微控制器和STM32 HAL库的外部中断应用的电路设计和回调函数编码示例。
电路设计:
连接外部中断引脚和相应的外部事件触发源(如按钮)。
确保外部中断引脚与控制器的外部中断线(EXTI)相连。
为外部中断引脚配置中断触发方式(上升沿触发、下降沿触发等)。
#include "stm32f4xx.h"
// 定义外部中断回调函数
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin) {
// 在此处处理外部中断事件
if (GPIO_Pin == GPIO_PIN_0) {
// 外部中断引脚GPIO_Pin为GPIO_PIN_0时的处理逻辑
// ...
} else if (GPIO_Pin == GPIO_PIN_1) {
// 外部中断引脚GPIO_Pin为GPIO_PIN_1时的处理逻辑
// ...
}
}
int main(void) {
// 初始化GPIO引脚为输入
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING; // 上升沿触发
GPIO_InitStruct.Pull = GPIO_PULLDOWN; // 上拉/下拉
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1; // 外部中断引脚
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct); // 初始化GPIOA引脚
// 使能外部中断
HAL_NVIC_EnableIRQ(EXTI0_IRQn); // 使能外部中断0
HAL_NVIC_EnableIRQ(EXTI1_IRQn); // 使能外部中断1
while (1) {
// 主循环中的其他代码
// ...
}
}
// 外部中断0的中断处理函数
void EXTI0_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_0);
}
// 外部中断1的中断处理函数
void EXTI1_IRQHandler(void) {
HAL_GPIO_EXTI_IRQHandler(GPIO_PIN_1);
}
以上代码示例假设外部中断引脚连接到STM32微控制器的GPIOA引脚0和1上。在主函数中,通过初始化GPIO引脚为输入并配置中断触发方式来准备外部中断。然后使用HAL_NVIC_EnableIRQ()函数使能外部中断,并在主循环中执行其他代码。当外部中断触发时,相应的中断处理函数EXTI0_IRQHandler()和EXTI1_IRQHandler()将会被调用,并通过HAL_GPIO_EXTI_IRQHandler()函数调用回调函数HAL_GPIO_EXTI_Callback()来处理外部中断事件。
请注意,以上代码仅提供了基本的框架,具体的外部中断处理逻辑需要根据实际需求进行编写。
3(3)
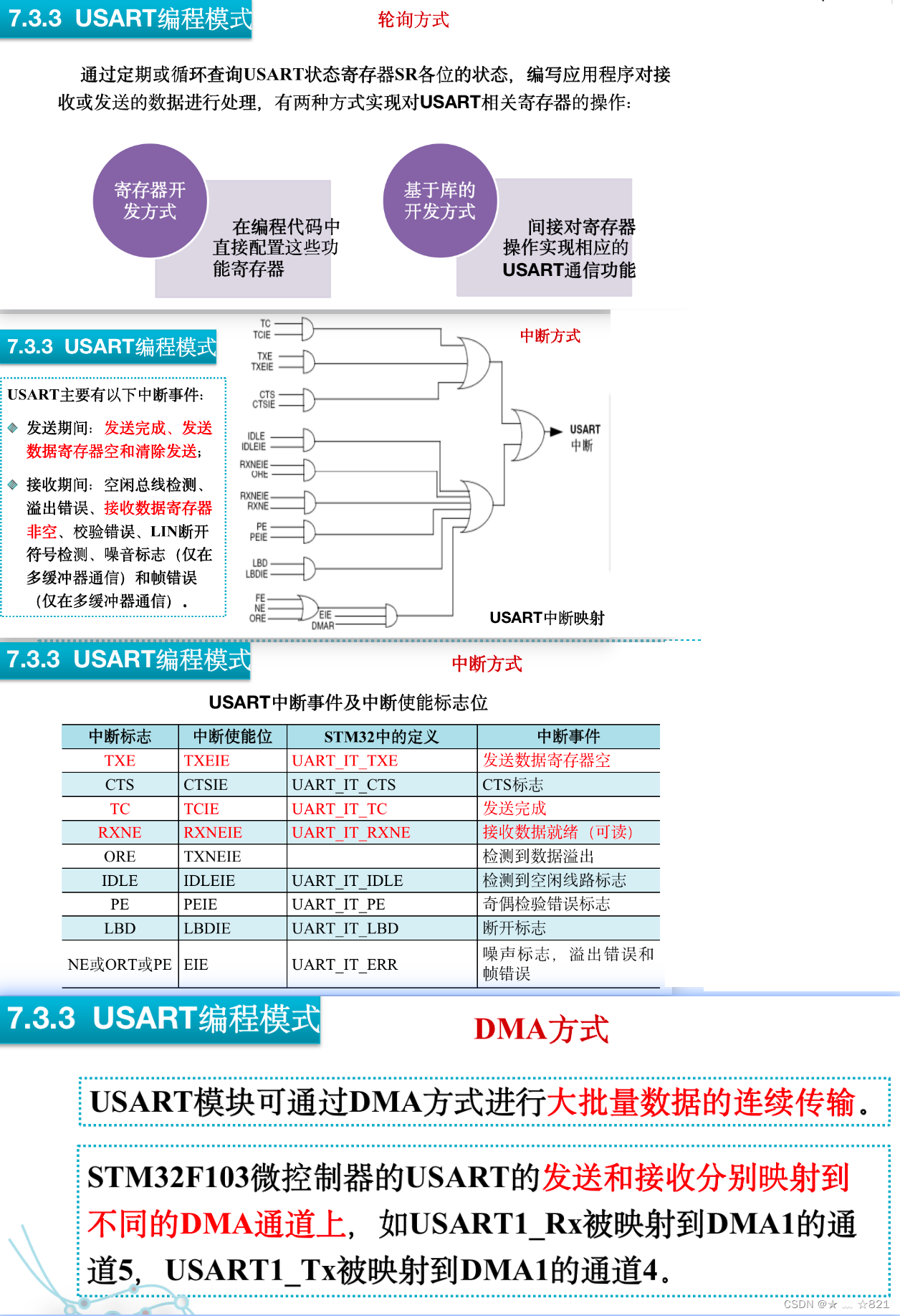
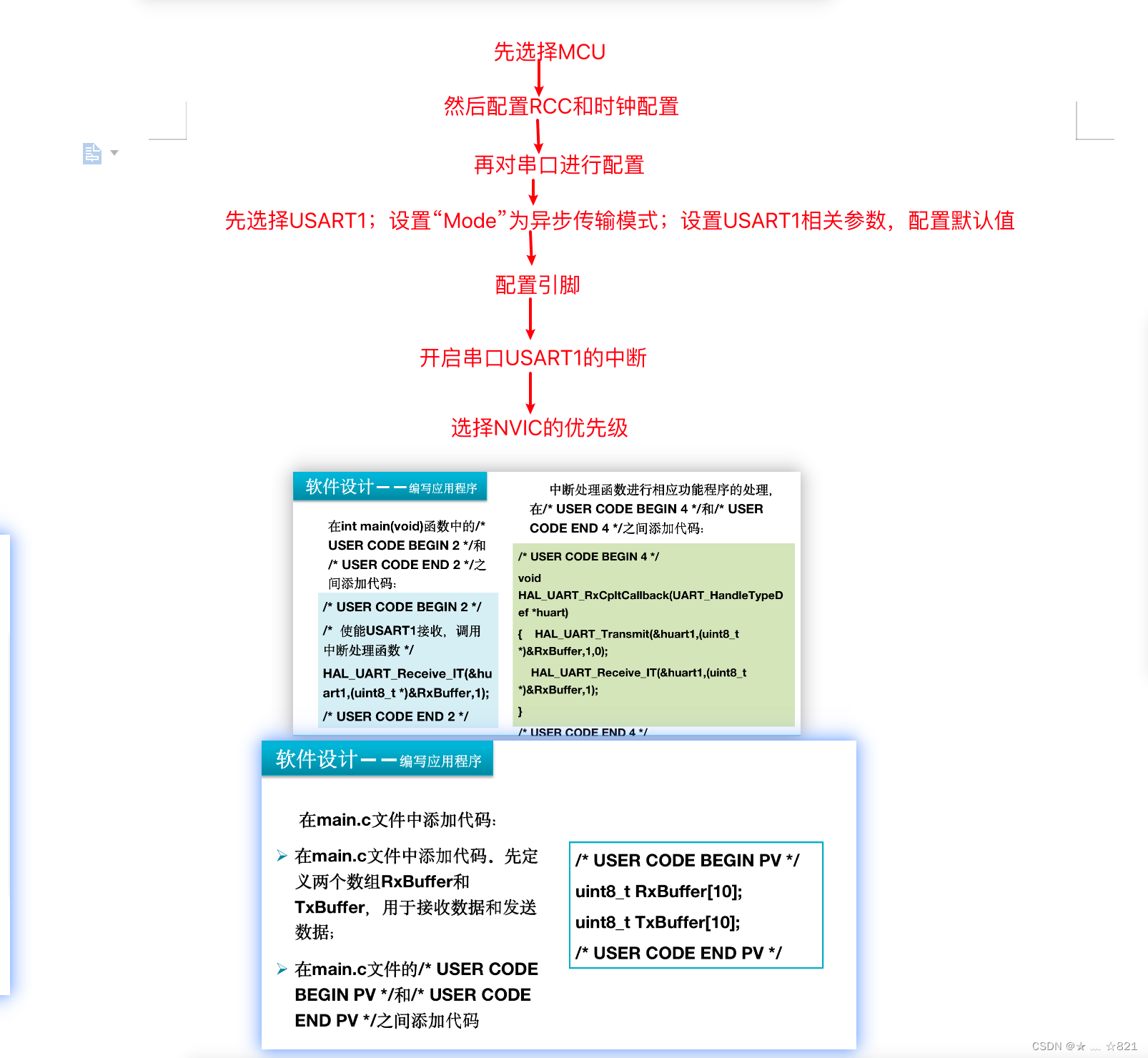
题目:(3) USART 应用:以某种数据帧格式实现轮询、中断及DMA方式的数据发送及接收,包括使用STM32CubeMX进行USART1配置的大致过程、补充代码。
#include "stm32f4xx.h"
#include "stm32f4xx_hal.h"
#define BUFFER_SIZE 10
UART_HandleTypeDef huart1;
DMA_HandleTypeDef hdma_usart1_tx;
DMA_HandleTypeDef hdma_usart1_rx;
uint8_t txBuffer[BUFFER_SIZE] = "Hello";
uint8_t rxBuffer[BUFFER_SIZE];
void USART1_Init(void);
void DMA_USART1_Init(void);
void USART1_SendPolling(void);
void USART1_SendInterrupt(void);
void USART1_SendDMA(void);
void USART1_ReceivePolling(void);
void USART1_ReceiveInterrupt(void);
void USART1_ReceiveDMA(void);
int main(void)
{
HAL_Init();//初始化HAL库
USART1_Init();
DMA_USART1_Init();
while (1)
{
// 轮询方式发送数据
USART1_SendPolling();
// 轮询方式接收数据
USART1_ReceivePolling();
// 中断方式发送数据
USART1_SendInterrupt();
// 中断方式接收数据
USART1_ReceiveInterrupt();
// DMA方式发送数据
USART1_SendDMA();
// DMA方式接收数据
USART1_ReceiveDMA();
}
}
void USART1_Init(void)
{
// 初始化USART1的GPIO引脚
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOB_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_6 | GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF7_USART1;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
//这段代码初始化了GPIO端口B的引脚6和引脚7,设置它们为复用功能的推挽输出模式,上拉电阻使其保持高电平,设置GPIO的工作速度为非常高频率,选择GPIO的复用功能为USART1。
// 初始化USART1的配置参数
__HAL_RCC_USART1_CLK_ENABLE();
//该代码使能了USART1外设的时钟。
huart1.Instance = USART1;
huart1.Init.BaudRate = 115200;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
HAL_UART_Init(&huart1);
//这段代码初始化了USART1的配置参数。设置USART1的实例为USART1,波特率为115200,数据位长度为8位,停止位为1位,无奇偶校验,工作模式为发送和接收模式,无硬件流控制,过采样率为16倍。
}
void DMA_USART1_Init(void)
{
// 初始化USART1的DMA配置参数
__HAL_RCC_DMA2_CLK_ENABLE();
hdma_usart1_tx.Instance = DMA2_Stream7;
hdma_usart1_tx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
hdma_usart1_tx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_tx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_tx.Init.Mode = DMA_NORMAL;----设置DMA传输模式
hdma_usart1_tx.Init.Priority = DMA_PRIORITY_LOW;---设置DMA优先级
hdma_usart1_tx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
HAL_DMA_Init(&hdma_usart1_tx);
//这部分代码配置了 USART1 的 DMA 发送通道(DMA2_Stream7)。其中设置了通道号、传输方向(从内存到外设)、外设地址增量模式禁止、内存地址增量模式使能、数据对齐方式等。然后通过 HAL_DMA_Init() 函数对 DMA 进行初始化。
__HAL_LINKDMA(&huart1, hdmatx, hdma_usart1_tx);
hdma_usart1_rx.Instance = DMA2_Stream5;
hdma_usart1_rx.Init.Channel = DMA_CHANNEL_4;
hdma_usart1_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
hdma_usart1_rx.Init.PeriphInc = DMA_PINC_DISABLE;
hdma_usart1_rx.Init.MemInc = DMA_MINC_ENABLE;
hdma_usart1_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
hdma_usart1_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
hdma_usart1_rx.Init.Mode = DMA_NORMAL;
hdma_usart1_rx.Init.Priority = DMA_PRIORITY_HIGH;
hdma_usart1_rx.Init.FIFOMode = DMA_FIFOMODE_DISABLE;
HAL_DMA_Init(&hdma_usart1_rx);
这部分代码配置了 USART1 的 DMA 接收通道(DMA2_Stream5)。与发送通道类似,设置了通道号、传输方向(从外设到内存)、外设地址增量模式禁止、内存地址增量模式使能、数据对齐方式等。然后通过 HAL_DMA_Init() 函数对 DMA 进行初始化。
__HAL_LINKDMA(&huart1, hdmarx, hdma_usart1_rx);
// 使能USART1的DMA接收中断
HAL_NVIC_SetPriority(DMA2_Stream5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream5_IRQn);
// 使能USART1的DMA发送中断
HAL_NVIC_SetPriority(DMA2_Stream7_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA2_Stream7_IRQn);
}
void USART1_SendPolling(void)
{
HAL_UART_Transmit(&huart1, txBuffer, BUFFER_SIZE, HAL_MAX_DELAY);
}
void USART1_SendInterrupt(void)
{
HAL_UART_Transmit_IT(&huart1, txBuffer, BUFFER_SIZE);
HAL_UART_IRQHandler(&huart1);
}
void USART1_SendDMA(void)
{
HAL_UART_Transmit_DMA(&huart1, txBuffer, BUFFER_SIZE);
}
void USART1_ReceivePolling(void)
{
HAL_UART_Receive(&huart1, rxBuffer, BUFFER_SIZE, HAL_MAX_DELAY);
}
void USART1_ReceiveInterrupt(void)
{
HAL_UART_Receive_IT(&huart1, rxBuffer, BUFFER_SIZE);
HAL_UART_IRQHandler(&huart1);
}
void USART1_ReceiveDMA(void)
{
HAL_UART_Receive_DMA(&huart1, rxBuffer, BUFFER_SIZE);
}
void DMA2_Stream5_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_usart1_rx);
}
void DMA2_Stream7_IRQHandler(void)
{
HAL_DMA_IRQHandler(&hdma_usart1_tx);
}
void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
// UART发送完成中断回调函数
}
}
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if (huart == &huart1)
{
// UART接收完成中断回调函数
}
}
3(4)
要使用定时器产生可变周期和占空比的PWM信号,并定时点亮LED,可以按照以下步骤进行:
初始化定时器和GPIO引脚:
初始化定时器,选择合适的定时器(如TIM1、TIM2等),设置时钟源和预分频系数。
配置定时器的工作模式为PWM模式,设置计数器的自动重装载值。
配置输出通道对应的GPIO引脚为PWM输出模式。
初始化LED引脚为输出模式。
配置定时器的周期和占空比:
根据需要,设置定时器的周期和占空比,可以通过修改自动重装载值和占空比寄存器的值来实现。
启动定时器:
启动定时器,使其开始计数。
等待定时器中断:
进入一个无限循环,等待定时器中断触发。
在定时器中断处理函数中控制LED点亮:
在定时器中断处理函数中,设置LED引脚的状态,使其点亮或熄灭。
题目:(4)定时器的应用:用定时器产生周期和占空比可变的PWM信号、定时点亮LED。
#include "stm32f4xx.h"
#include "stm32f4xx_hal.h"
TIM_HandleTypeDef htim1;
TIM_HandleTypeDef htim2;
uint32_t period = 1000; // 初始周期为 1000
uint32_t dutyCycle = 500; // 初始占空比为 50%
void TIM1_PWM_Init(void);
void TIM2_Init(void);
void GPIO_Init(void);
int main(void)
{
HAL_Init();
TIM1_PWM_Init();
TIM2_Init();
GPIO_Init();
int pwmMode = 1; // PWM 模式标志,初始为 1
while (1)
{
if (pwmMode)
{
// 按键检测,调整周期和占空比
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
HAL_Delay(10); // 延时去抖动
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_0) == GPIO_PIN_RESET)
{
// 增加周期
period += 100;
if (period > 2000)
period = 2000;
// 更新周期寄存器的值
__HAL_TIM_SET_AUTORELOAD(&htim1, period - 1);
}
}
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
HAL_Delay(10); // 延时去抖动
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_1) == GPIO_PIN_RESET)
{
// 增加占空比
dutyCycle += 100;
if (dutyCycle > period)
dutyCycle = period;
// 更新占空比寄存器的值
__HAL_TIM_SET_COMPARE(&htim1, TIM_CHANNEL_1, dutyCycle);
}
}
}
else
{
// 在指定时间间隔内循环闪烁 LED 灯
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_12, GPIO_PIN_SET); // 点亮 LED
HAL_Delay(500); // 延时 500ms
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_12, GPIO_PIN_RESET); // 熄灭 LED
HAL_Delay(500); // 延时 500ms
}
// 按键检测,切换功能模式
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_2) == GPIO_PIN_RESET)
{
HAL_Delay(10); // 延时去抖动
if (HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_2) == GPIO_PIN_RESET)
{
pwmMode = !pwmMode; // 切换功能模式
}
}
}
}
void TIM1_PWM_Init(void)
{
TIM_OC_InitTypeDef sConfigOC;
__HAL_RCC_TIM1_CLK_ENABLE();
htim1.Instance = TIM1;
htim1.Init.Prescaler = (SystemCoreClock / 1000000) - 1; // 配置定时器时钟为 1MHz
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = period - 1; // 设置周期
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim1);
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = dutyCycle; // 设置初始占空比
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1);
HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1); // 启动定时器
}
void TIM2_Init(void)
{
__HAL_RCC_TIM2_CLK_ENABLE();
htim2.Instance = TIM2;
htim2.Init.Prescaler = (SystemCoreClock / 1000) - 1; // 配置定时器时钟为 1kHz
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 1000 - 1; // 设置定时器的周期为 1s
HAL_TIM_Base_Init(&htim2);
HAL_TIM_Base_Start(&htim2); // 启动定时器
}
void GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
__HAL_RCC_GPIOA_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_0 | GPIO_PIN_1 | GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
__HAL_RCC_GPIOE_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
GPIO_InitStruct.Pin = GPIO_PIN_9;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
GPIO_InitStruct.Alternate = GPIO_AF1_TIM1;
HAL_GPIO_Init(GPIOE, &GPIO_InitStruct);
GPIO_InitStruct.Pin = GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
#include "stm32f4xx.h"
void TIM_PWM_Init(void);
void LED_Init(void);
int main(void)
{
TIM_PWM_Init();
LED_Init();
while (1)
{
// 等待定时器中断
}
}
void TIM_PWM_Init(void)
{
// 初始化定时器和PWM参数
TIM_HandleTypeDef htim;
TIM_OC_InitTypeDef sConfig;
// 选择合适的定时器和通道(例如TIM1和TIM_CHANNEL_1)
htim.Instance = TIM1;
htim.Init.Prescaler = 0;
htim.Init.CounterMode = TIM_COUNTERMODE_UP;
htim.Init.Period = 999; // 设置定时器周期
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
HAL_TIM_PWM_Init(&htim);
// 配置PWM参数
sConfig.OCMode = TIM_OCMODE_PWM1;
sConfig.Pulse = 500; // 设置占空比
sConfig.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfig.OCFastMode = TIM_OCFAST_DISABLE;
HAL_TIM_PWM_ConfigChannel(&htim, &sConfig, TIM_CHANNEL_1);
// 启动定时器和PWM输出
HAL_TIM_PWM_Start(&htim, TIM_CHANNEL_1);
}
void LED_Init(void)
{
// 初始化LED引脚为输出模式
GPIO_InitTypeDef GPIO_InitStruct;
// 配置LED引脚对应的GPIO端口和引脚号
GPIO_InitStruct.Pin = GPIO_PIN_13;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
}
void TIM1_UP_TIM10_IRQHandler(void)
{
if (TIM_GetITStatus(TIM1, TIM_IT_UPDATE) != RESET)
{
// 清除定时器中断标志位
TIM_ClearITPendingBit(TIM1, TIM_IT_UPDATE);
// 控制LED点亮或熄灭
GPIOC->ODR ^= GPIO_PIN_13;
}
}
3(5)
题目:(5) ADC的应用:采集2路模拟信号。
#include "stm32xxxx.h" // 包含您所使用的 STM32 系列芯片的头文件
#include "stm32xxxx_hal_adc.h" // 包含 STM32 HAL 库的 ADC 头文件
ADC_HandleTypeDef hadc; // 定义 ADC 句柄
void initializeADC()
{
// 初始化 ADC 句柄
hadc.Instance = ADC1; // 假设使用 ADC1
hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2; // ADC 时钟分频为 PCLK/2
hadc.Init.Resolution = ADC_RESOLUTION_12B; // ADC 分辨率为 12 位
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; // 数据右对齐
// 更多的初始化配置根据需要设置
// 初始化 ADC
HAL_ADC_Init(&hadc);------------库函数
}
void captureAnalogSignals()
{
// 启动 ADC 转换
HAL_ADC_Start(&hadc);----------库函数
// 等待转换完成
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY); ------------库函数// 使用阻塞方式等待转换完成
// 读取采样值
uint16_t sample1 = HAL_ADC_GetValue(&hadc);------------库函数
// 启动下一次转换
HAL_ADC_Start(&hadc);
// 等待转换完成
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY);
// 读取采样值
uint16_t sample2 = HAL_ADC_GetValue(&hadc);
// 处理和使用采样值
// 在这里进行进一步的操作,例如数据分析、滤波、显示或发送到其他设备等
}
int main()
{
// 初始化 ADC
initializeADC();
// 循环采集两路模拟信号
while (1)
{
captureAnalogSignals();
// 在这里可以添加延时,控制采样频率
}
return 0;
}
4(1)
题目:(1)综合运用定时器、ADC和GPIO。用定时器实现定时启动ADC,用GPIO控制的数码管显示ADC的采集值。
#include "stm32xxxx.h" // 包含您所使用的 STM32 系列芯片的头文件
#include "stm32xxxx_hal_adc.h" // 包含 STM32 HAL 库的 ADC 头文件
#include "stm32xxxx_hal_gpio.h" // 包含 STM32 HAL 库的 GPIO 头文件
#include "stm32xxxx_hal_rcc.h" // 包含 STM32 HAL 库的 RCC 头文件
#include "stm32xxxx_hal_tim.h" // 包含 STM32 HAL 库的定时器头文件
ADC_HandleTypeDef hadc; // 定义 ADC 句柄
TIM_HandleTypeDef htim; // 定义定时器句柄
uint16_t adcValue; // 用于保存 ADC 采样值
void initializeADC()
{
// 初始化 ADC 句柄
hadc.Instance = ADC1; // 假设使用 ADC1
hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2; // ADC 时钟分频为 PCLK/2
hadc.Init.Resolution = ADC_RESOLUTION_12B; // ADC 分辨率为 12 位
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; // 数据右对齐
// 更多的初始化配置根据需要设置
// 初始化 ADC
HAL_ADC_Init(&hadc);
}
void initializeTimer()
{
// 初始化定时器句柄
htim.Instance = TIM2; // 假设使用 TIM2
htim.Init.Prescaler = 10000 - 1; // 预分频器值,定时器频率为 10 kHz
htim.Init.Period = 1000 - 1; // 计数周期,定时周期为 1 秒
// 更多的初始化配置根据需要设置
// 初始化定时器
HAL_TIM_Base_Init(&htim);
}
void initializeGPIO()
{
// 初始化 GPIO 引脚
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = GPIO_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP; // 输出模式,推挽输出
GPIO_InitStruct.Pull = GPIO_NOPULL; // 无上下拉
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW; // 输出速度为低速
// 更多的初始化配置根据需要设置
// 初始化 GPIO
HAL_GPIO_Init(GPIO_Port, &GPIO_InitStruct);
}
void startADCConversion()
{
// 启动 ADC 转换
HAL_ADC_Start(&hadc);
}
void readADCValue()
{
// 等待转换完成
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY); // 使用阻塞方式等待转换完成
// 读取采样值
adcValue = HAL_ADC_GetValue(&hadc);
}
void displayADCValue()
{
// 将 ADC 采样值显示在数码管上
// 根据您使用的具体数码管和 GPIO 引脚连接方式进行相应的操作
// 在这里进行数码管的控制和显示操作
if (adcValue >= 0 && adcValue <= 9)
{
HAL_GPIO_WritePin(GPIO_Port, GPIO_Pin, GPIO_PIN_SET);
}
else
{
HAL_GPIO_WritePin(GPIO_Port, GPIO_Pin, GPIO_PIN_RESET);
}
}
int main()
{
// 初始化 ADC 和定时器
initializeADC();
initializeTimer();
// 配置 GPIO 和数码管
// 根据您使用的具体数码管和 GPIO 引脚连接方式进行相应的配置
initializeGPIO();
// 启动定时器
HAL_TIM_Base_Start_IT(&htim); // 启动定时器并开启中断
// 主循环
while (1)
{
// 在定时器中断中进行 ADC 采样和数码管显示
}
return 0;
}
// 定时器中断处理函数
void TIM2_IRQHandler()
{
if (__HAL_TIM_GET_FLAG(&htim, TIM_FLAG_UPDATE) != RESET)
{
if (__HAL_TIM_GET_IT_SOURCE(&htim, TIM_IT_UPDATE) != RESET)
{
__HAL_TIM_CLEAR_IT(&htim, TIM_IT_UPDATE);
// 在定时器中断中启动 ADC 转换
startADCConversion();
// 读取 ADC 采样值
readADCValue();
// 在定时器中断中显示 ADC 采样值
displayADCValue();
}
}
}
4(2)
题目:(2)综合运用定时器、ADC 和UART。用定时器实现定时启动ADC,用UART发送ADC的采集值。
#include "stm32xxxx.h" // 包含您所使用的 STM32 系列芯片的头文件
#include "stm32xxxx_hal_adc.h" // 包含 STM32 HAL 库的 ADC 头文件
#include "stm32xxxx_hal_uart.h" // 包含 STM32 HAL 库的 UART 头文件
#include "stm32xxxx_hal_rcc.h" // 包含 STM32 HAL 库的 RCC 头文件
ADC_HandleTypeDef hadc; // 定义 ADC 句柄
UART_HandleTypeDef huart; // 定义 UART 句柄
TIM_HandleTypeDef htim; // 定义定时器句柄
void initializeADC()
{
// 初始化 ADC 句柄
hadc.Instance = ADC1; // 假设使用 ADC1
hadc.Init.ClockPrescaler = ADC_CLOCK_SYNC_PCLK_DIV2; // ADC 时钟分频为 PCLK/2
hadc.Init.Resolution = ADC_RESOLUTION_12B; // ADC 分辨率为 12 位
hadc.Init.DataAlign = ADC_DATAALIGN_RIGHT; // 数据右对齐
// 更多的初始化配置根据需要设置
// 初始化 ADC
HAL_ADC_Init(&hadc);
}
void initializeUART()
{
// 初始化 UART 句柄
huart.Instance = USART1; // 假设使用 USART1
huart.Init.BaudRate = 115200; // 波特率为 115200
huart.Init.WordLength = UART_WORDLENGTH_8B; // 数据位长度为 8 位
huart.Init.StopBits = UART_STOPBITS_1; // 停止位为 1 位
huart.Init.Parity = UART_PARITY_NONE; // 无校验位
huart.Init.Mode = UART_MODE_TX; // 仅发送模式
// 更多的初始化配置根据需要设置
// 初始化 UART
HAL_UART_Init(&huart);
}
void initializeTimer()
{
// 初始化定时器句柄
htim.Instance = TIM2; // 假设使用定时器 TIM2
htim.Init.Prescaler = 1000 - 1; // 设置预分频值
htim.Init.Period = 5000 - 1; // 设置定时器周期
htim.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim.Init.CounterMode = TIM_COUNTERMODE_UP;
// 初始化定时器
HAL_TIM_Base_Init(&htim);
}
void startADCConversion()
{
// 启动 ADC 转换
HAL_ADC_Start(&hadc);
}
void sendADCValue(uint16_t adcValue)
{
// 将 ADC 采样值转换为字符串
char str[16];
sprintf(str, "%hu\n", adcValue); // 将采样值格式化为字符串
// 通过 UART 发送 ADC 采样值
HAL_UART_Transmit(&huart, (uint8_t*)str, strlen(str), HAL_MAX_DELAY);
}
int main()
{
// 初始化 HAL 库
HAL_Init();
// 初始化系统时钟和外设时钟
SystemClock_Config();
// 初始化 ADC、UART 和定时器
initializeADC();
initializeUART();
initializeTimer();
// 启动定时器
HAL_TIM_Base_Start(&htim);
while (1)
{
// 等待定时器溢出中断
while (__HAL_TIM_GET_FLAG(&htim, TIM_FLAG_UPDATE) == RESET)
{
// 等待定时器中断
}
// 清除定时器中断标志位
__HAL_TIM_CLEAR_FLAG(&htim, TIM_FLAG_UPDATE);
// 在此进行 ADC 采样
startADCConversion();
HAL_ADC_PollForConversion(&hadc, HAL_MAX_DELAY);
uint16_t adcValue = HAL_ADC_GetValue(&hadc);
// 发送 ADC 采样值
sendADCValue(adcValue);
}
}