Baumer工业相机堡盟工业相机如何通过BGAPISDK设置相机的Bufferlist序列(C++)
- Baumer工业相机
- Baumer工业相机的Bufferlist序列功能的技术背景
- CameraExplorer如何查看相机Bufferlist功能
- 在BGAPI SDK里通过函数设置相机Bufferlist参数
- Baumer工业相机通过BGAPI SDK设置相机Bufferlist的优势
- Baumer工业相机通过BGAPI SDK设置相机Bufferlist的行业应用
Baumer工业相机
Baumer工业相机堡盟相机是一种高性能、高质量的工业相机,可用于各种应用场景,如物体检测、计数和识别、运动分析和图像处理。
Baumer的万兆网相机拥有出色的图像处理性能,可以实时传输高分辨率图像。此外,该相机还具有快速数据传输、低功耗、易于集成以及高度可扩展性等特点。
Baumer工业相机的Bufferlist是Baumer工业相机SDK中的一个列表,用于存储从相机传入的数据流。在图像采集软件中,可以通过设置Bufferlist的大小来控制缓冲区的大小,从而更好地控制图像采集的速度和质量。
Baumer工业相机的Camera Explorer软件功能强大,内容丰富,通过该软件可以有效的获取相机相关的全部信息,在对于相机检测项目的开发中,有时需要获取相机中图像Buffer信息和相关的数据流信息,而Camera Explorer软件可以有效的显示相关的信息。
Baumer工业相机的Bufferlist序列功能的技术背景
工业相机通常具有固定帧率的功能。固定帧率意味着相机可以以预定的速率捕捉图像帧。这对于需要在实时应用中保持稳定且一致的图像采集速率非常重要。
Bufferlist是Baumer工业相机SDK中的一个列表,用于存储从相机传入的数据流。在图像采集软件中,可以通过设置Bufferlist的大小来控制缓冲区的大小,从而更好地控制图像采集的速度和质量。
Bufferlist的技术背景是高速数据采集。在高速数据采集中,数据流的速度非常快,如果不及时处理,可能会导致数据丢失或者处理失败。因此,需要设置一个足够大的Bufferlist来存储这些数据流,以便及时处理
具体如何启用和配置固定帧率功能可能因不同的Baumer工业相机型号而有所不同。因此,建议您参考相机的用户手册或联系Baumer官方以获取详细的操作指南和技术支持。他们将能够提供适用于您具体型号的工业相机的相关信息和建议。
CameraExplorer如何查看相机Bufferlist功能
Baumer工业相机 的相机软件Camera Explorer可以可视化便捷地进行查看相机固定帧率功能
首先,双击进入相机界面
然后选择相机页面中左上角标题菜单栏中的Widgets,并选择其中的Camera Features。
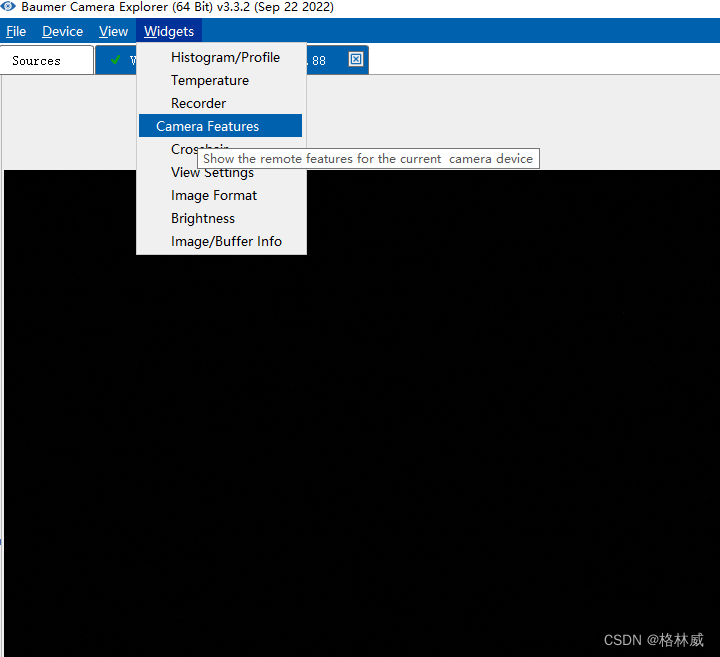
然后在软件左侧出现相机功能相关信息,如下所示:
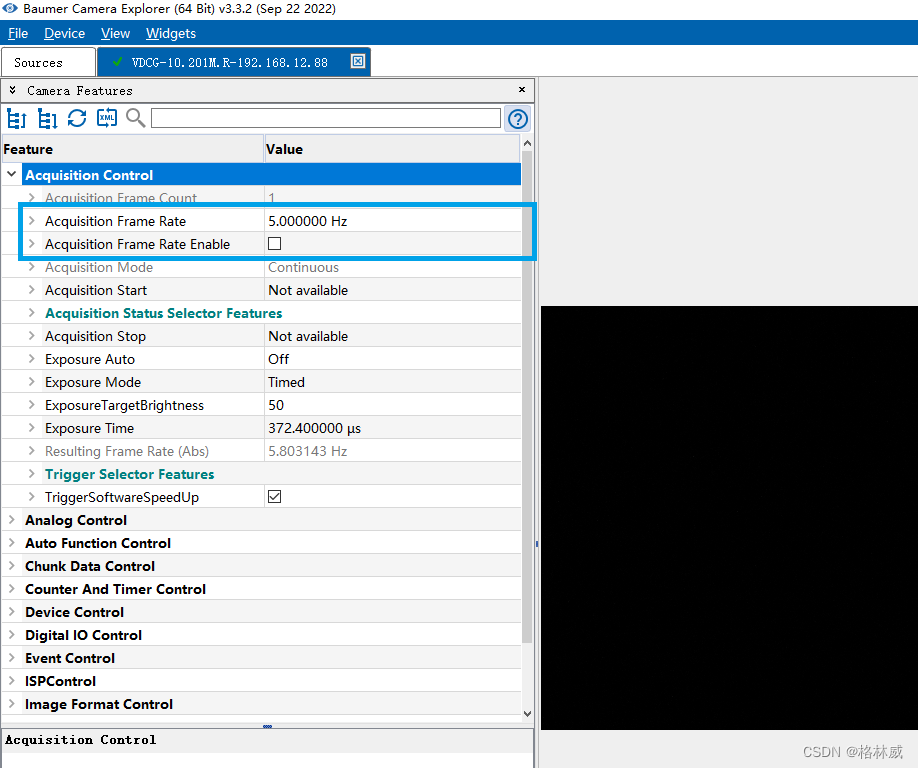
通过开启Acquisition Frame Rate Enable功能可以使用设置相机的固定帧率功能,如下图所示:
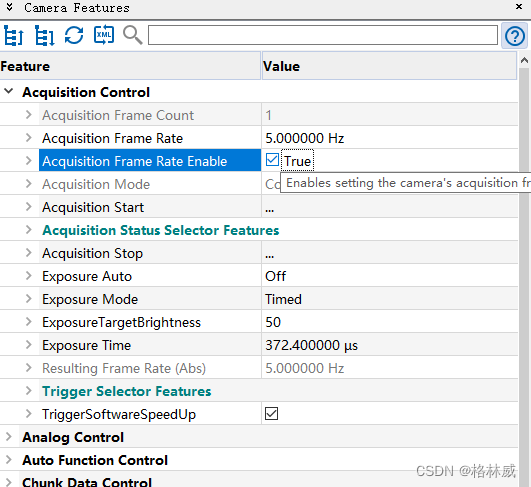
通过设置当前固定帧率为5,则此时相机的帧率为5.
在BGAPI SDK里通过函数设置相机Bufferlist参数
在相机初始化时设置Bufferlist参数,C++调用代码如下所示:
private void AcquisitionFrameRateEnable_CheckedChanged(object sender, EventArgs e)
{
try
{
if (AcquisitionFrameRateEnable.Checked)
{
bool FrameRateEnable = false;
if (actform.pDevice != null)
FrameRateEnable = actform.pDevice.RemoteNodeList["AcquisitionFrameRateEnable"].Value;
if (FrameRateEnable == false)
{
if (actform.pDevice != null)
pDevice.RemoteNodeList["AcquisitionFrameRateEnable"].Value = true;
}
OnNotifyShowRecieveMsg("采集帧率控制已开启");
if (pDevice != null)
{
double AcquisitionFrameRatedouble = (double)pDevice.RemoteNodeList["AcquisitionFrameRate"].Value;
OnNotifyShowRecieveMsg("当前采集帧率为:" + AcquisitionFrameRatedouble);
}
numericUpDown9.ReadOnly = false;
}
else
{
if (pDevice != null)
pDevice.RemoteNodeList["AcquisitionFrameRateEnable"].Value = false;
OnNotifyShowRecieveMsg("采集帧率控制已关闭");
numericUpDown9.ReadOnly = true;
}
}
catch (Exception ex1)
{
OnNotifyShowRecieveMsg(ex1.Message);
}
}
private void SaveParameters_Click(object sender, EventArgs e)
{
try
{
if (AcquisitionFrameRateEnable.Checked)
{
double FrameRate = (double)numericUpDown9.Value;
if (pDevice != null)
pDevice.RemoteNodeList["AcquisitionFrameRate"].Value = FrameRate;
OnNotifyShowRecieveMsg("当前采集帧率已修改为:" + FrameRate);
}
else
{
pDevice.RemoteNodeList["UserSetSelector"].Value = "UserSet1";
actform.pDevice.RemoteNodeList["UserSetSave"].Execute();
OnNotifyShowRecieveMsg("参数保存成功");
}
}
catch (Exception ex1)
{
OnNotifyShowRecieveMsg(ex1.Message);
}
}
Baumer工业相机通过BGAPI SDK设置相机Bufferlist的优势
Bufferlist参数的优点是可以设置缓冲区的大小,从而更好地控制图像采集的速度和质量。
Baumer工业相机通过BGAPI SDK设置相机固定帧率的优势主要包括:
稳定的图像采集速率:固定帧率功能确保相机以固定的速率捕捉图像帧。这对于实时应用非常重要,如机器视觉、自动化生产和监视系统。通过固定帧率,相机可以以一致且稳定的速率捕捉图像,确保数据的准确性和连续性。
帧率和其他系统同步:固定帧率可以与其他设备或系统保持同步。例如,当工业相机用于与机械臂协同工作时,固定帧率可以确保相机捕捉到的图像与机械臂的运动完全同步,从而实现准确的位置控制和操作。
简化数据处理和分析:固定帧率使数据处理和分析变得更简单。在相机采集速率固定的情况下,处理系统可以按照固定的时间间隔来处理图像帧,从而简化数据处理和算法设计。这使得在实时应用中更容易实现快速和准确的图像处理和分析。
避免数据丢失和不匹配:固定帧率功能可以确保相机发送的图像帧与数据接收端的处理速率保持一致。这有助于避免数据丢失和因采集速率不匹配而导致的数据不完整。通过固定帧率,可以实现可靠的数据传输和处理,提高系统的稳定性和性能。
控制图像质量和带宽:固定帧率允许用户在图像质量和带宽之间找到平衡。通过固定帧率,用户可以控制相机采集图像的速率,以便图像质量和数据传输带宽之间达到最佳平衡。这对于具有带宽限制的系统和应用非常重要。
综上所述,工业相机使用固定帧率功能可以提供稳定的图像采集速率,确保与其他系统的同步,简化数据处理,避免数据丢失,并提供对图像质量和数据带宽的控制。这些优势使得固定帧率功能在许多实时应用中具有重要意义。
Baumer工业相机通过BGAPI SDK设置相机Bufferlist的行业应用
Baumer工业相机的固定帧率功能在许多行业应用中发挥着关键作用。以下是一些示例:
自动化生产:在自动化生产线中,工业相机使用固定帧率功能来捕捉实时图像,以检测和识别产品的缺陷、完成质量控制和执行自动化操作。通过固定帧率,相机可以以一致的速率采集图像,确保生产过程的可靠性和稳定性。
机器视觉:在机器视觉应用中,工业相机使用固定帧率功能来捕捉和处理实时图像,用于目标检测、边缘检测、测量、定位和识别等任务。固定帧率确保图像处理算法在固定的时间间隔内进行运算,从而实现准确和高效的机器视觉分析。
医疗影像:在医疗影像应用中,工业相机使用固定帧率功能来捕捉高分辨率的图像,例如X射线、MRI和超声图像。固定帧率确保图像采集和数据传输的准确性,以帮助医生进行诊断和治疗决策。
运动分析:在运动分析领域,工业相机使用固定帧率功能来捕捉和跟踪快速运动的对象。通过固定帧率,相机可以提供稳定和连续的图像帧,从而实现精准的运动检测、姿势分析和动作追踪。
智能交通:在智能交通系统中,工业相机使用固定帧率功能来捕捉车辆和行人的图像,以进行交通监控、车牌识别和行为分析等任务。固定帧率可以确保图像采集和处理的一致性,在高速运动下仍能提供清晰和可靠的图像。
航空航天:在航空航天领域,工业相机使用固定帧率功能来捕捉航空器和宇航器的图像,以进行导航、目标跟踪、姿态控制和安全检查等应用。固定帧率可以提供高质量的图像数据,支持精准的航空航天操作。
这些只是工业相机固定帧率功能在行业中的一些典型应用案例,实际上,它在许多其他领域,如军事、机器人、物流等,也发挥着重要作用。






![linux学习(文件系统+inode)[14]](https://img-blog.csdnimg.cn/50d40015930f40ca9fe58196c2e901ec.png)