伺服电机入门01
伺服电机= 电机+编码器,电机闭环
电机 : pmsm bldc 有刷电机 acim电机 步进电机等,
编码器:绝对编码器和增量编码器等
编码器入门:
信号:
总线信号
RS422 RS485 基础上面的总线方式
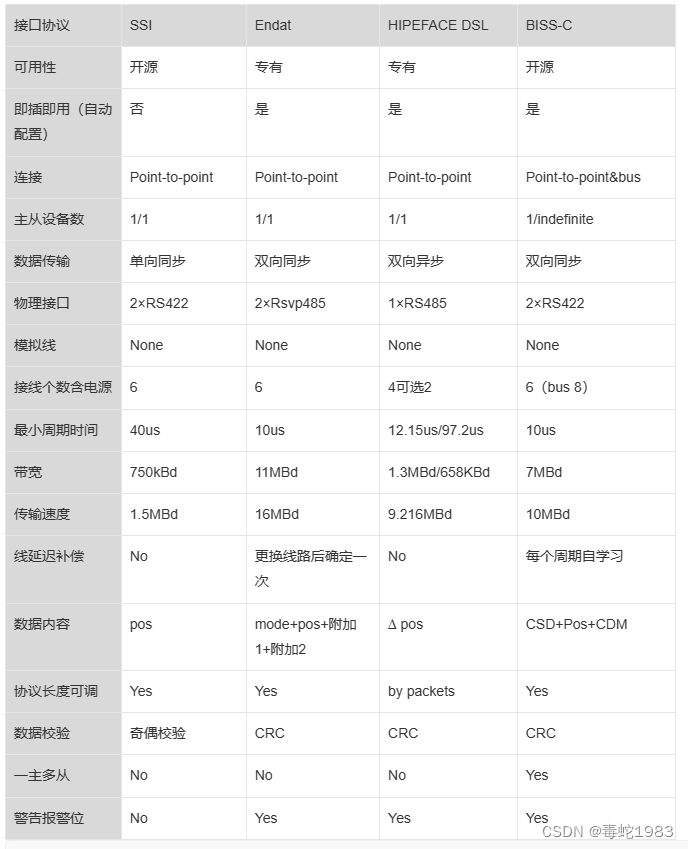
以下面几种信号是可以细分,也就是通过细分增加编码器的分辨率,
分辨率不直接代表 编码器的精度和电机全部工作精度,还有很因素会影响电机真实精度问题
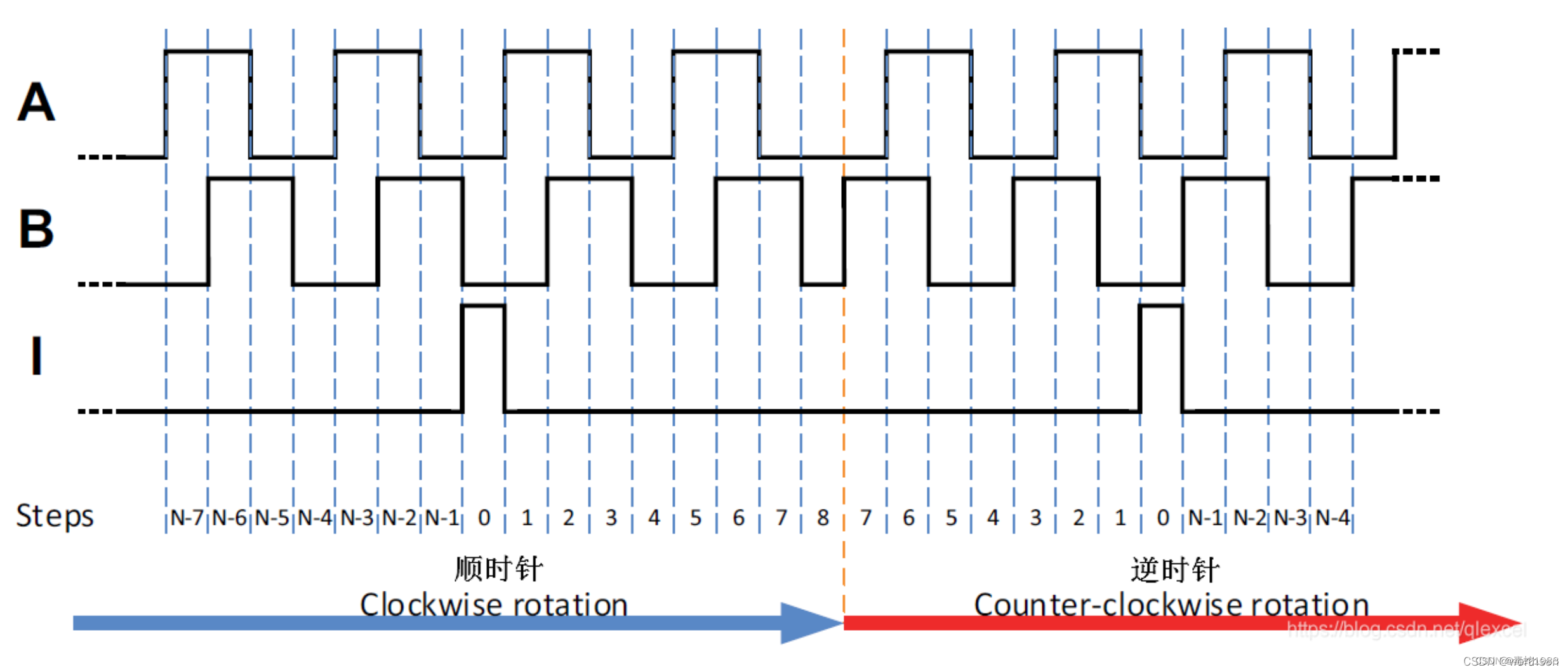
ABI 信号
通常用定时器捕捉接收 ,
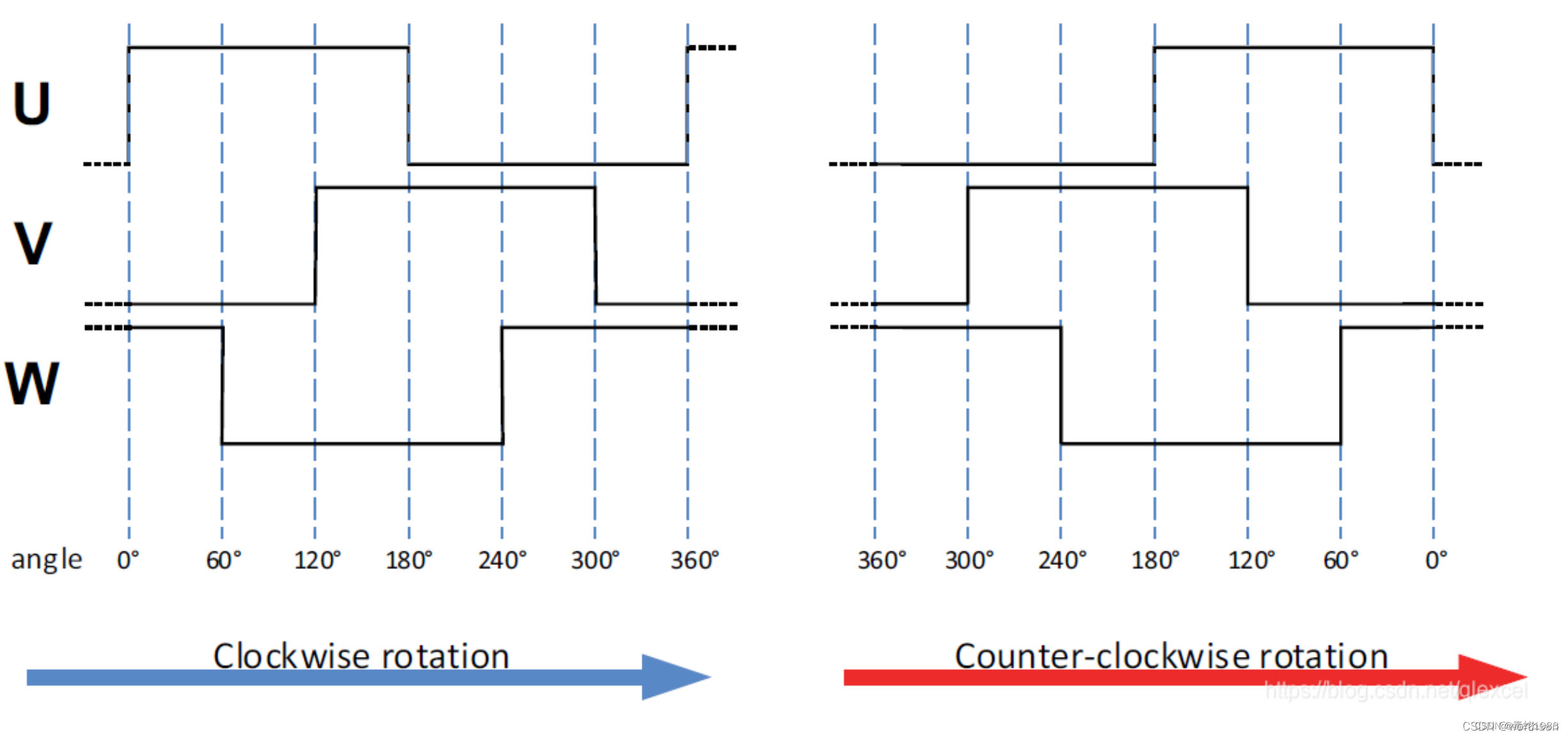
uvw 信号:
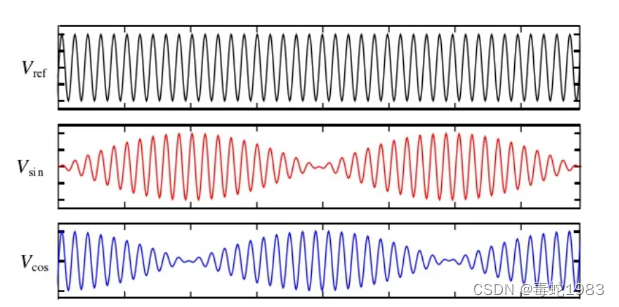
旋转信号:
编码器输出 旋转信号 , 接收端: 使用ADC 捕捉旋转信号 ,转成数字信号,驱动器得到数字处理, 因为信号量是模拟信号, mcu mpu 等芯片通常内部处理是数字,通过adc 得到数字cpu 才能识别 传输过来的pos 等信息。
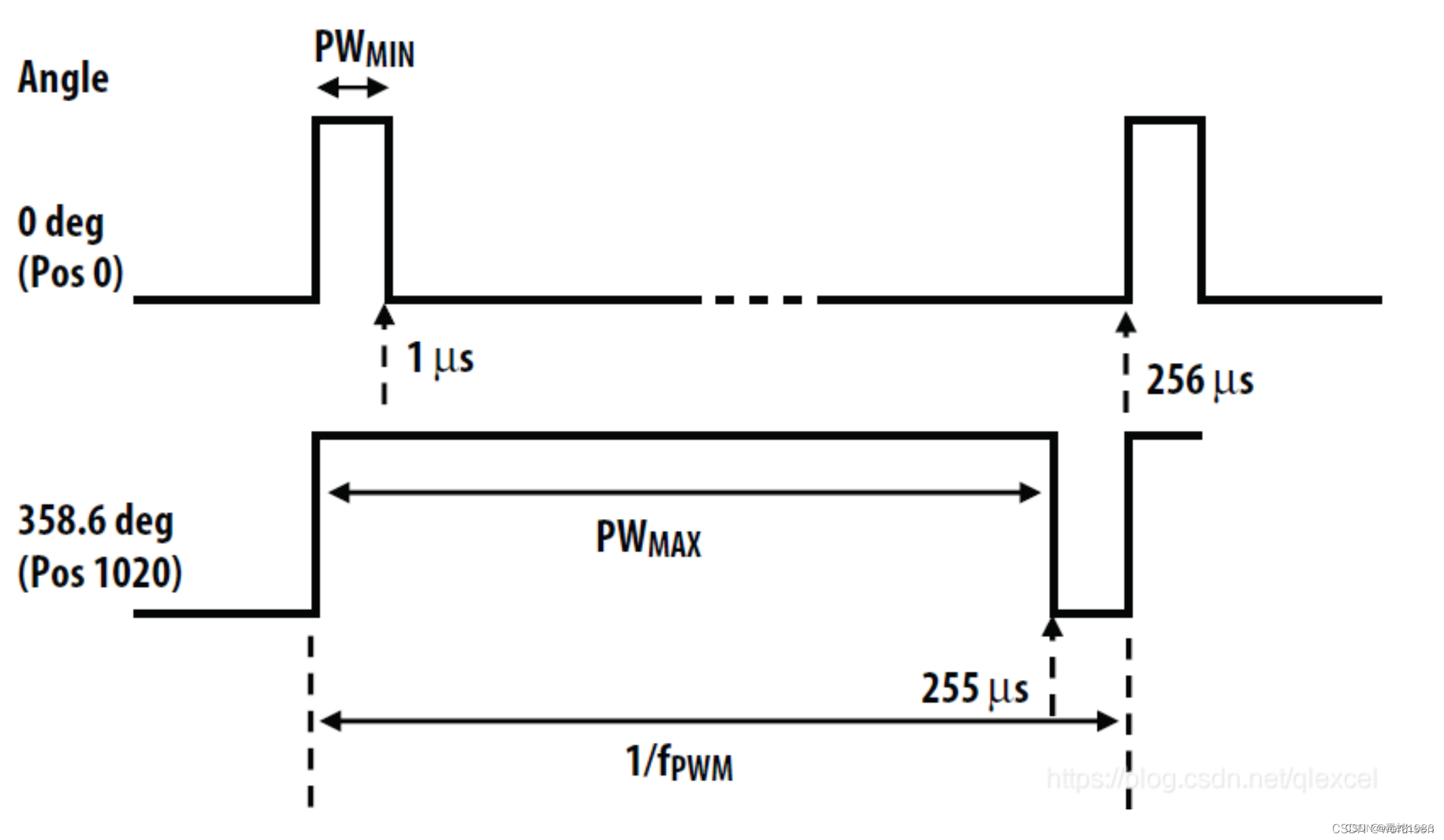
pwm 信号
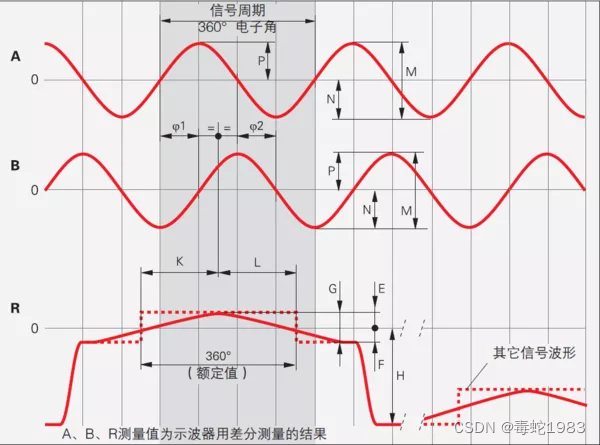
1Vpp 信号
编码器输出 1vpp , 接收端: 使用ADC 捕捉1vpp ,转成数字信号,驱动器得到数字处理,
电机的控制方式
1.标量控制
2.失量控制
1. 变频器 VFD
1.1 V/F 控制就是 标量控制,没有使用 foc 控制方式,
2.1 foc 是失量控制 分有感和无感控制方式
DTC也是失量控制
3 bldc 驱动有两种,6步换向控制和失量控制方式。
4 步进电机 有全步控制,半步控制 ,微步控制,FOC控制,步进电机也是可以做伺服系统的
步进电有很高的细分,市场上常用有磁编码器做步进机的伺服系统
5 有刷电机 通电就能转,其实也可以加编码器做伺服系统 。
stmbl 项目 多种编码器 捕捉的电路 原理图
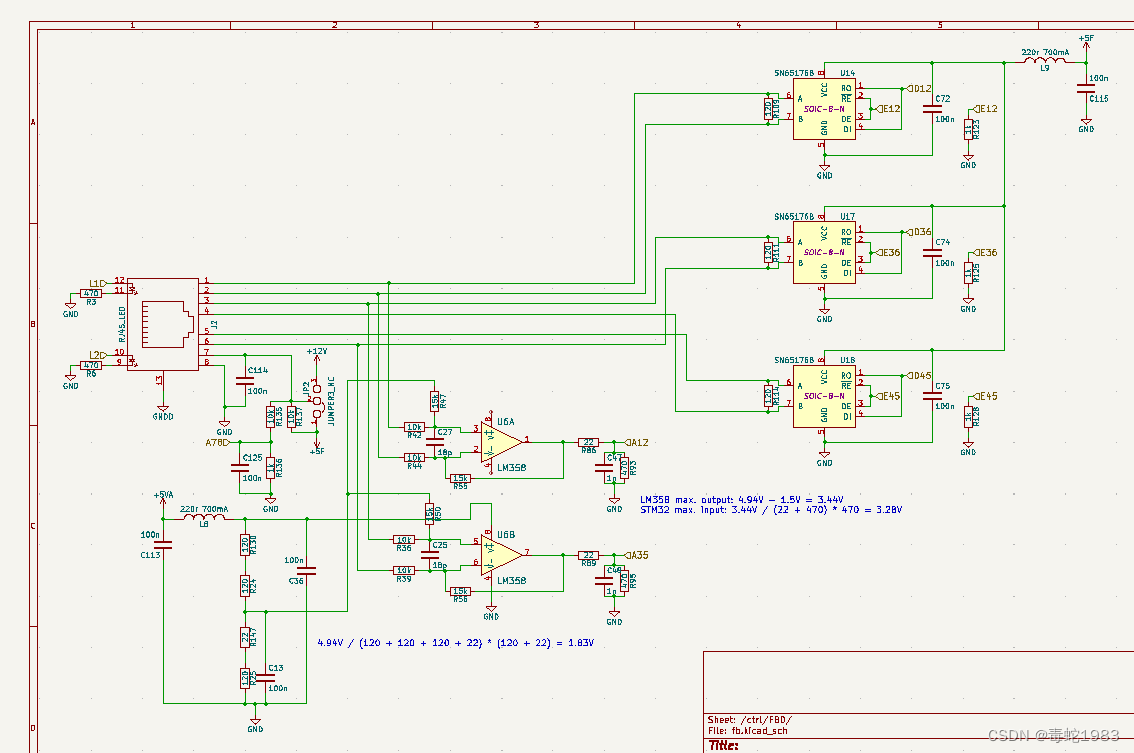
SN65176B 是一个差分芯片, 通过多个差分芯片用来布置市面非常多的编码器
uart endat spi 等等会使用这个,
LM358 运放芯片 这里会连 mcu 的adc
通过电路的布置 支持上面全部编码器的信号,stmbl 在软件上面有灵活的配置
电机驱动 :
三种都可以驱动 电机
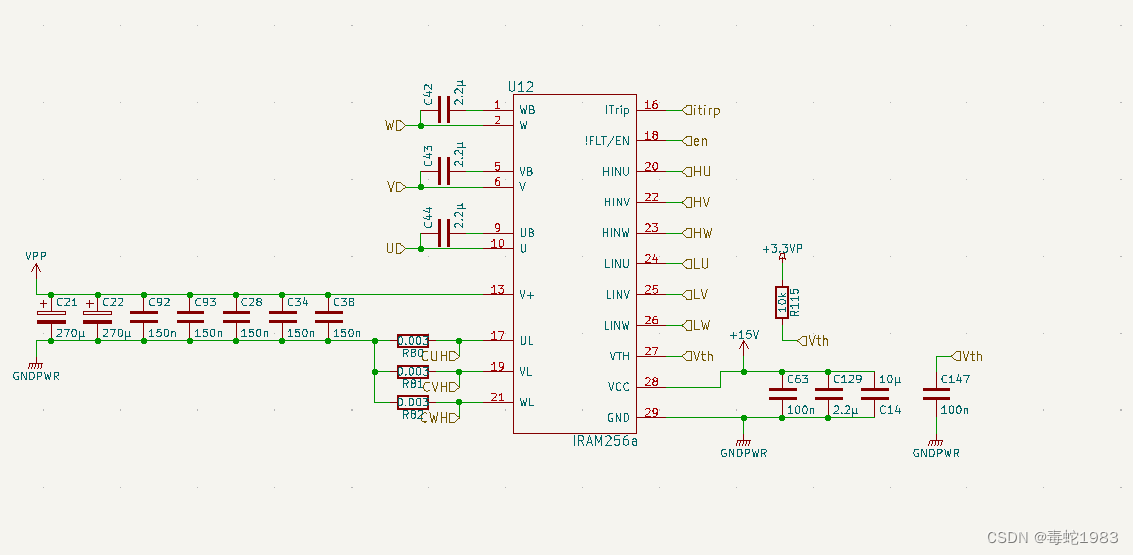
1:IPM 芯片
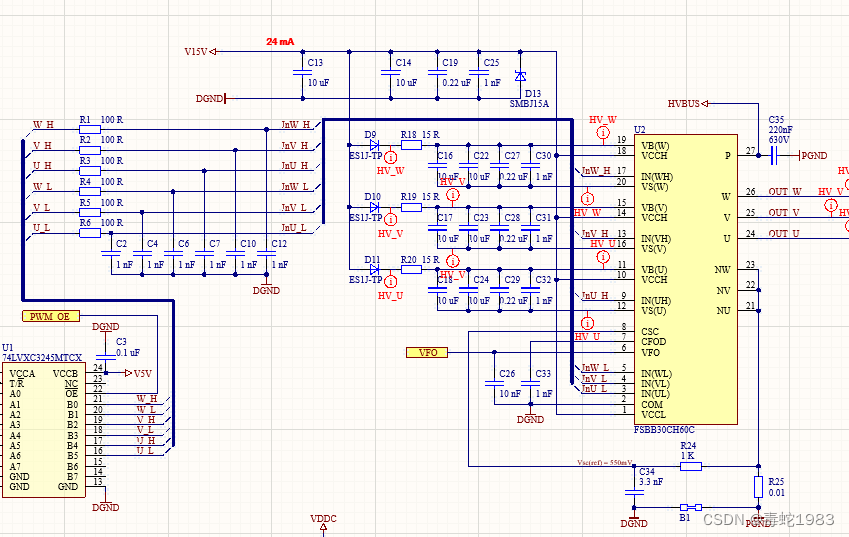
2:HVIC 芯片
3:分立
HVIC芯片:示例
IPM 芯片示例, IRAM256A 这个芯片已经停产,有换新的,,下面示例来自stmbl 高功率方案,
如果有新方案,可以NXP 三菱 等 IPM芯片找
stmbl 驱动器板的电路图
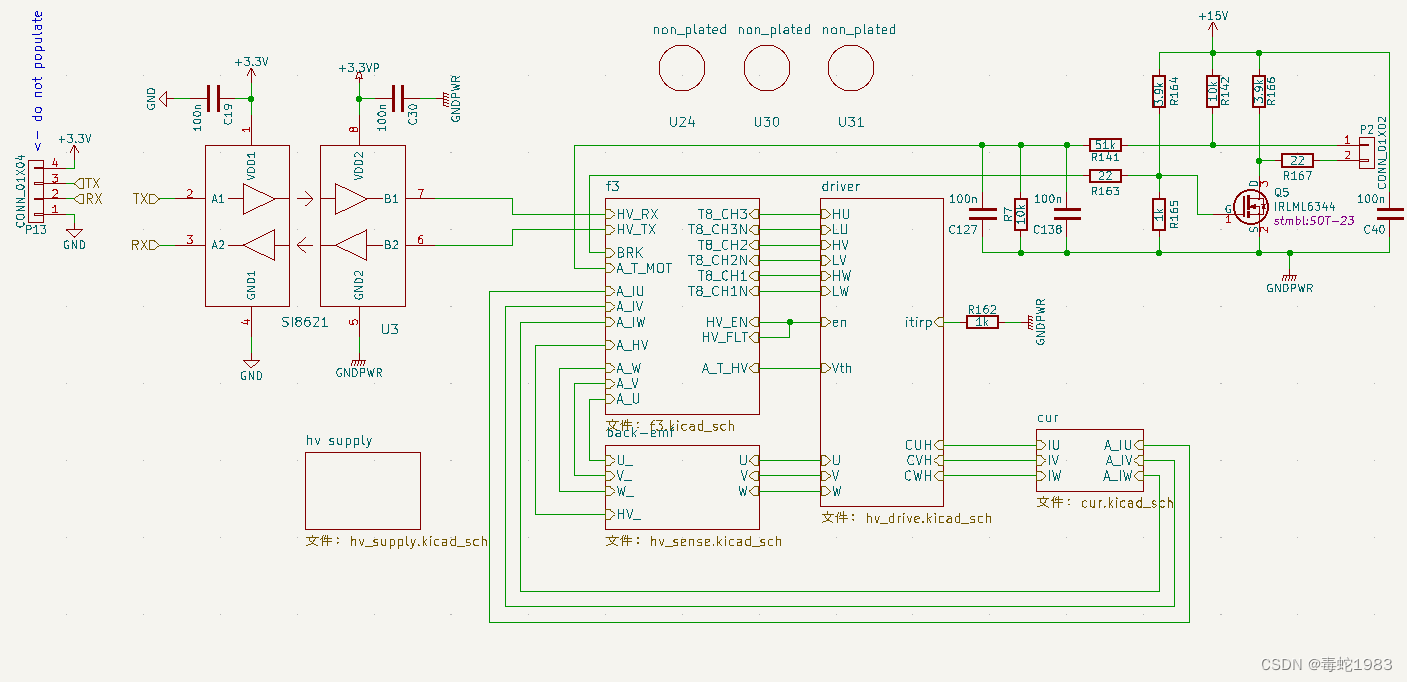
back-emf 和cur 分别 是电动势 和电流 捕捉,这两个可以 运用观察者模型加锁相环操作 做成无感电机驱动。
back-emf 电动势
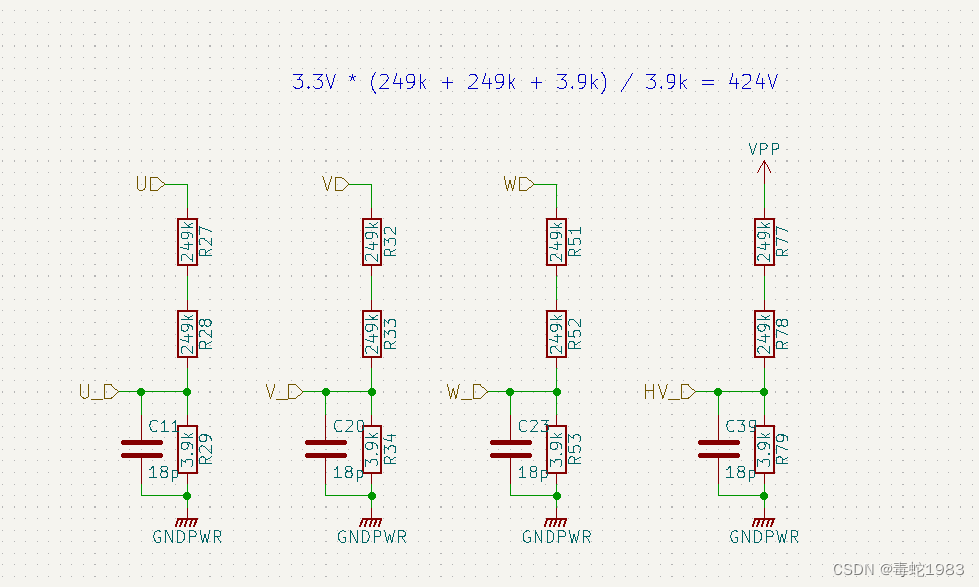
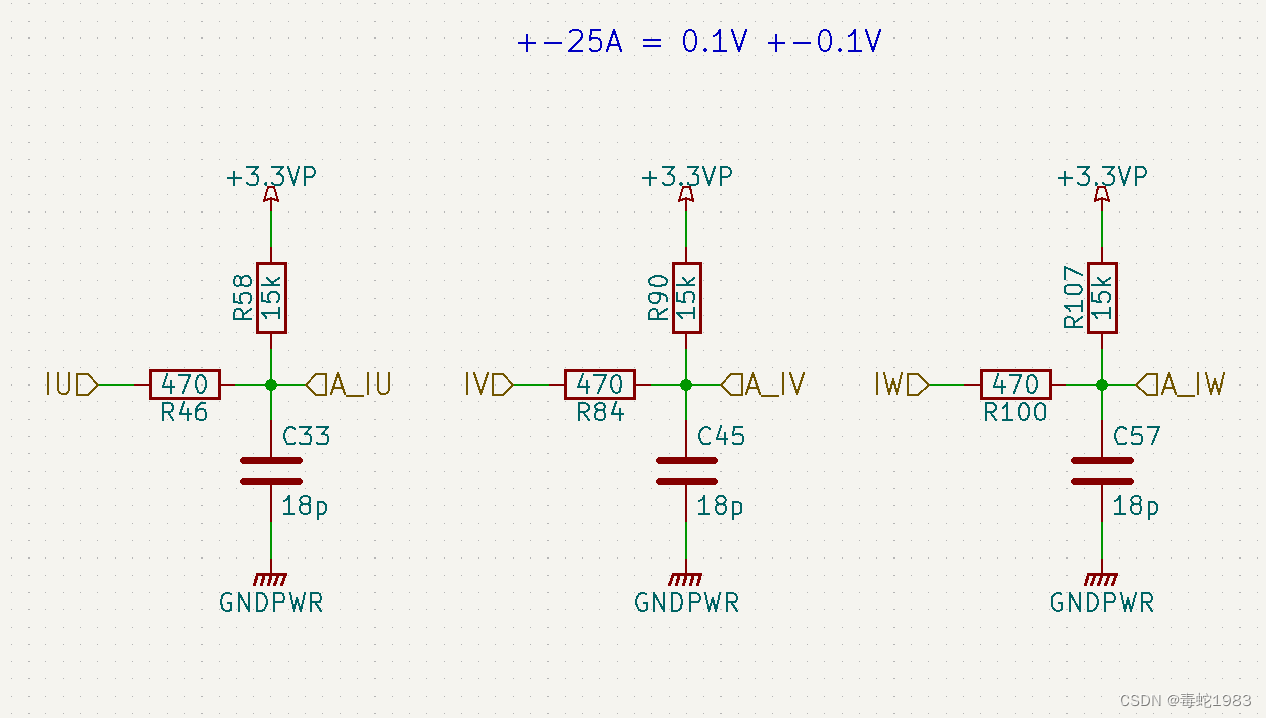
电流
cur