Multi-UAV Disaster Environment Coverage Planning with Limited-Endurance 有限续航时间下的多无人机灾害环境覆盖规划
- 定义问题
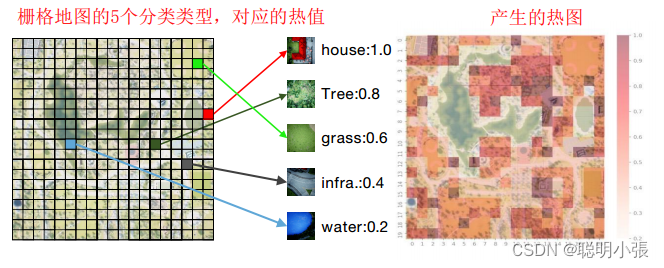
- 将初始地图转换为热图
- 产生优化路径
基于 已知的灾区热图,设计一个多无人机全覆盖搜索的路径规划方法。可以在无人机有限能量约束下探索最有价值的区域,提出了一种解决多无人机有限续航问题的路径规划算法,通过卫星或遥感航空图像,根据可能的灾区的重要性对其进行排序,并根据该排序完成路径规划。
无人机由于它的灵活性被广泛用于救援,针对灾区救援任务,需要无人机在更快的时间内完成灾区的搜索任务,并且考虑到无人机续航时间有限的问题,采用单机搜救很难完成受灾区域的全覆盖,所以需要采用多无人机协同搜索,要达到更高的搜索效率,要求无人机降低搜索重复率,因此需要对多机的每一台无人机各自的飞行路径进行优化成为一个热点问题。在就救援任务中最重要的不是全覆盖,而是高效的救援搜索,在发生灾难概率更高的地点进行重点搜索。
覆盖路径规划算法:回溯螺旋算法(BSA)可以完整覆盖环境,将环境单元栅格分为两部分 已覆盖和未覆盖;Zig-Zag;
定义问题
-
由初始的栅格地图转换为热图,在热图中 热值 越高的位置代表节点效率权重更高,效率权重只与热值有关,考虑无人机的有限续航问题,将各个无人机路径节点的距离相加的值作为各自的边缘权重。采用欧式距离。

-
定义一个单无人机的天真贪婪路径覆盖算法,在热图中快速解决有限续航覆盖路径规划问题。Heu-Greedy 和 SVReC 算法。
将初始地图转换为热图
设计采用热图的方式表示规划区域的地图,计算获取每个栅格的热值表示潜在的灾害,涉及真实灾害发生的概率。
在栅格地图中需要将封闭的救援任务区域分类,在大范围的城市中,往往需要进行成百上千种分类类型,考虑手动标记的困难,将场景标记添加到仅占网格图单元的20%,采用opencv增加标签的准确性。并且需要应道引导无人机在救援任务中的低空飞行。
产生优化路径
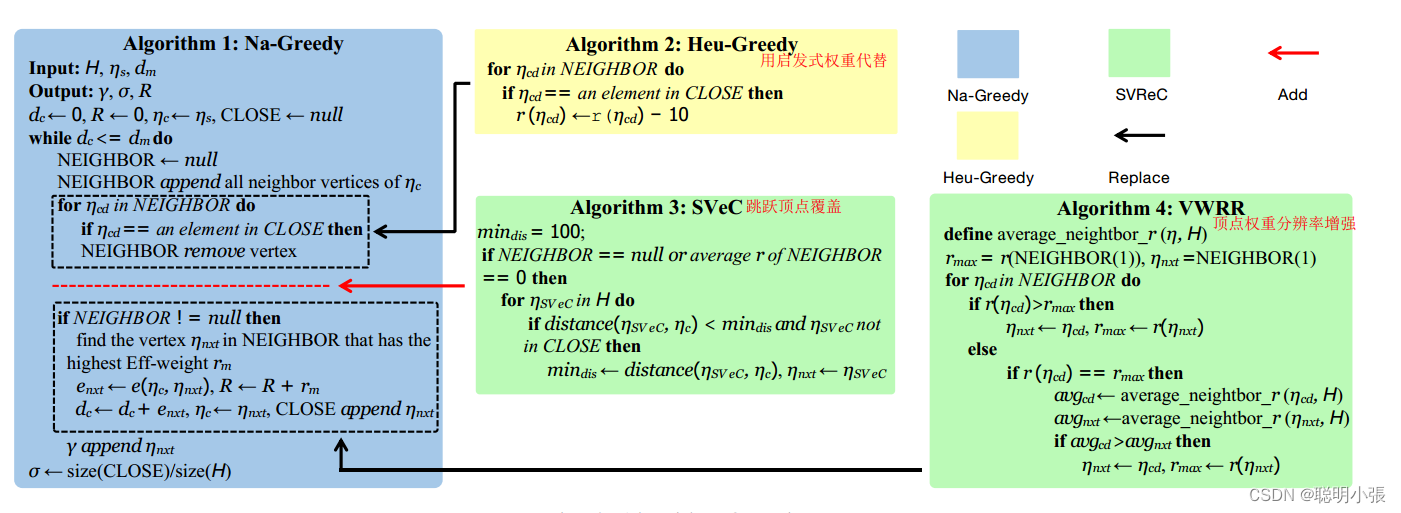
采用了跳跃顶点覆盖(SVeC)和顶点权重分辨率增强(VwRR)方法,将整个算法被称为SVReC。
-
Naive Greedy 算法 一种基于顶点效率权重的方法。
-
Heu-Greedy 算法 添加启发式权重作为软约束,如果候选点在 close list 中,对候选点的效率权重执行 -10 的操作,但权重陷阱依然存在,变成 动态权重陷阱 ,由于候选顶点的效率权重 r 交替下降,使得路径在覆盖的顶点之间重复跳动,顶点交替地成为路径中的下一个顶点。
-
跳跃顶点覆盖(SVeC) 采用跳跃顶点覆盖(SVeC)的方法解决权重陷阱的问题,当8个候选顶点都被覆盖,在效率权重 r 达到一定的阈值的候选点中,选取距离最小的节点作为下一个顶点。
-
顶点权重分辨率增强(VwRR) 解决权重冗余的问题,
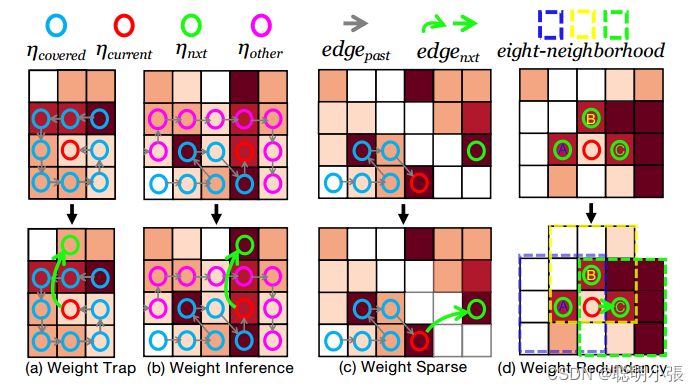
权重陷阱 是什么?当当前顶点的8个候选点都在 close list 中时,即候选点都已经被覆盖。
权重干扰 是什么?多无人机协同覆盖相邻的节点时,会发生权重干扰,所有无人机都共享同一个CLOSE集合,其他无人机节点围绕了当前无人机的当前节点。SVeC 可以作为一种协作策略来解决这个问题。
权重稀疏 是什么? 救援区域热图的热值不连续,热值高的地方被一些不重要的区域隔离,产生权重稀疏的问题。SVeC也可以解决这类问题。我们指定无人机的下一个目标节点,其效率权重 r 大于某个阈值rth的最近顶点。这样,在续航能力有限的情况下,可以确保累积的效率权重尽可能好,因为在没有相对重要顶点的区域不需要消耗无人机的能量。
权重冗余 是什么?无人机经常面临八个邻域中具有相同r的几个未覆盖的可达顶点,这些局部解决方案在当前处理步骤中可能是等效和冗余的。采用 VwRR 方法来解决这个问题,下图中表示的4种权重问题中最后一个权重冗余问题,绿色框中的单元的平均热值和相应顶点的平均Eff权重显著高于蓝色和黄色框中的单元格,因此当下一个顶点指定为绿色框中绿色顶点C时,我们在接下来的几个C中有更高的效率权重。