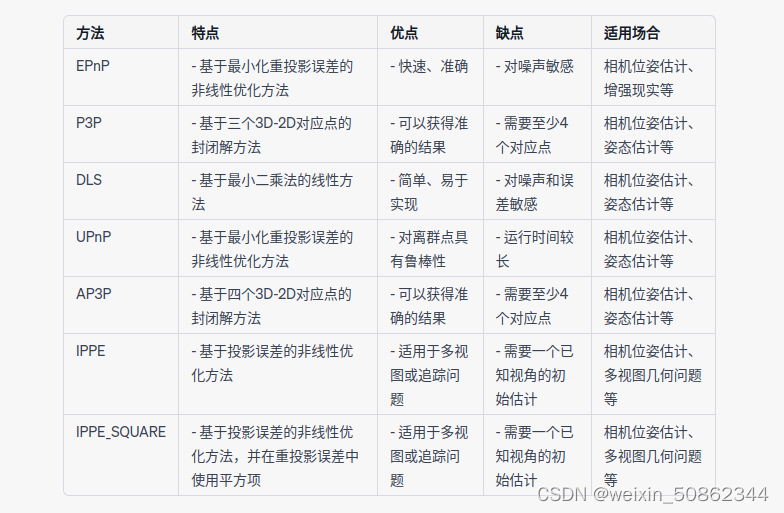
一些pnp的实验结论:
(1)yaw角稳定性上:
在opencv中,
SOLVEPNP_UPNP=SOLVEPNP_EPNP=SOLVEPNP_DLS>>SOLVEPNP_IPPE>SOLVEPNP_AP3P>SOLVEPNP_ITERATIVE
固定一个识别物体检查结算的yaw角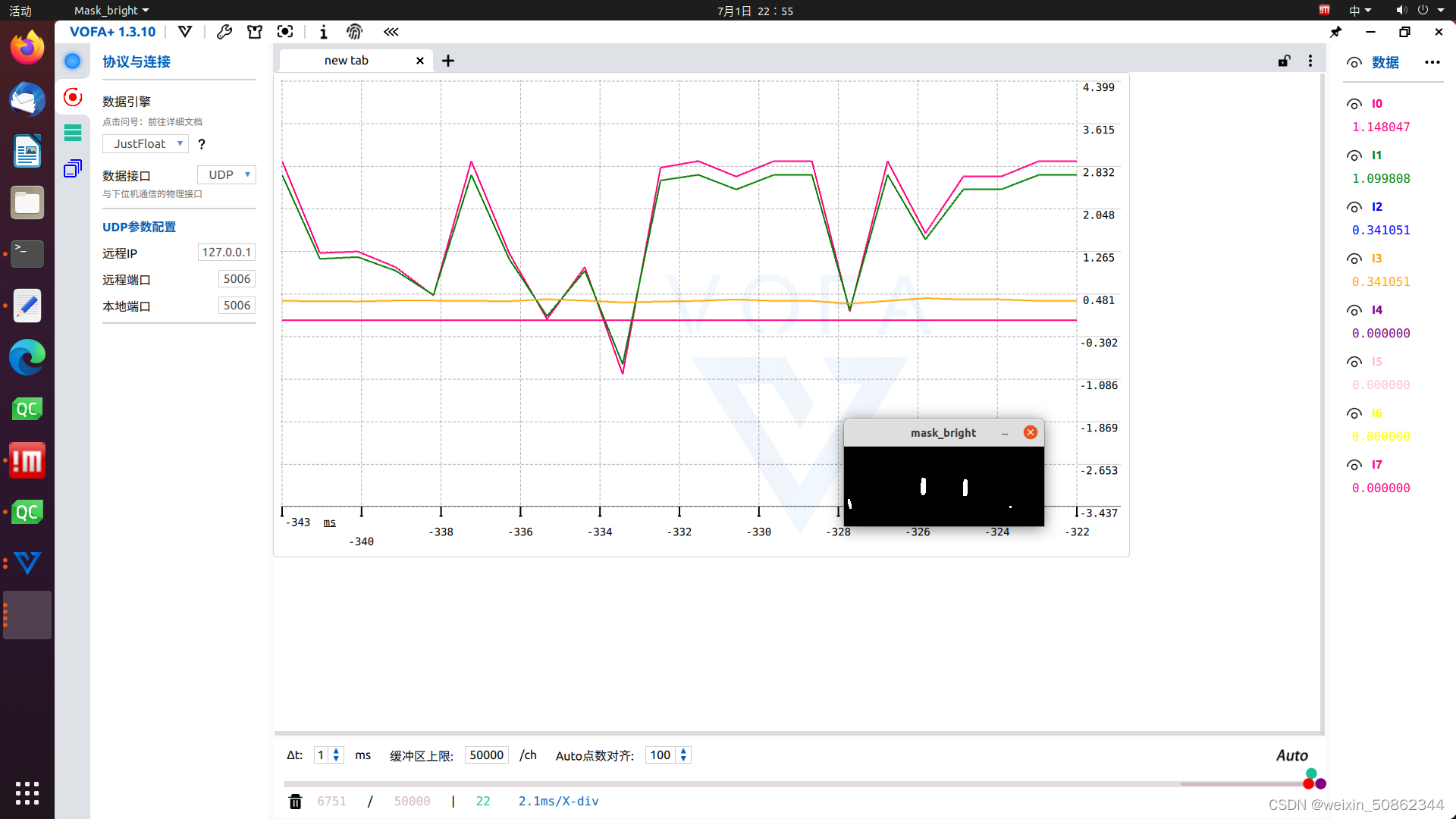 在这张图中l1是ippe,l2是AP3P,l3,l4分别是UPNP,EPNP,两者基本重叠
在这张图中l1是ippe,l2是AP3P,l3,l4分别是UPNP,EPNP,两者基本重叠
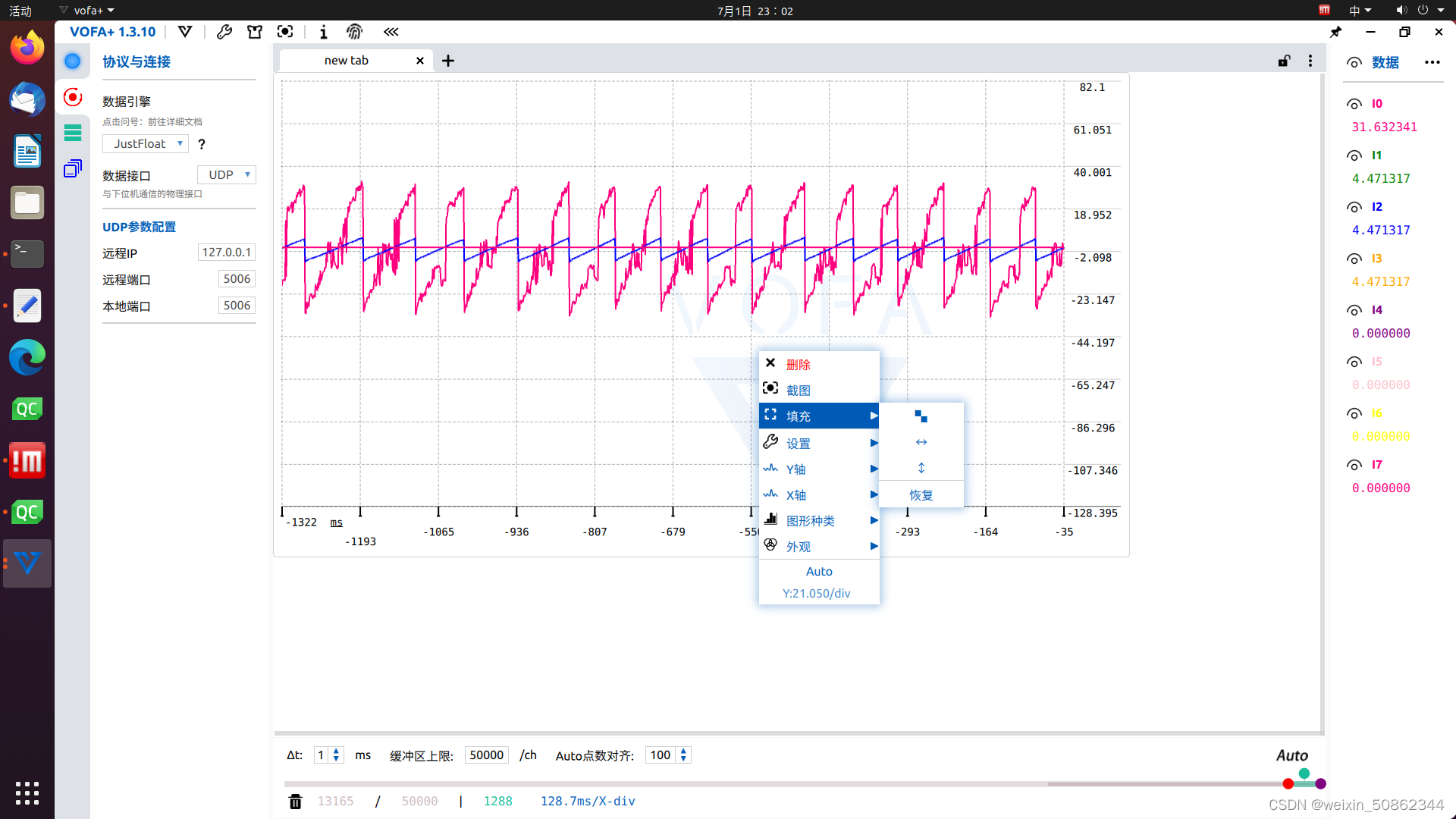 第二张图l1,l2,l3,l4分别是IPPE,DLS,UPNP,EPNP,后三者基本重叠,视为相等,且没有明显数据波动
第二张图l1,l2,l3,l4分别是IPPE,DLS,UPNP,EPNP,后三者基本重叠,视为相等,且没有明显数据波动
一.EPnP
1.1 控制点
-
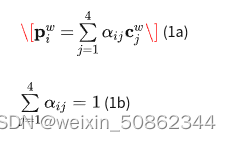
形成 :3D参考点的齐次坐标是控制点齐次坐标的线性组合
-
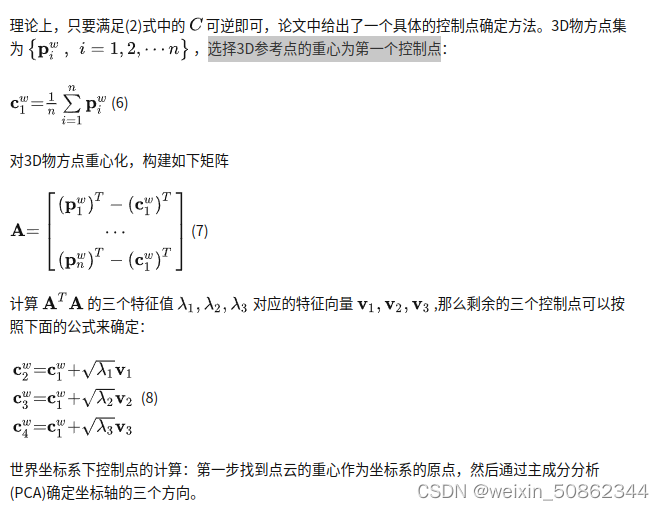
选择
-
为什么要引入控制点:为了提高位姿估计的准确性和稳定性。通过引入额外的控制点,EPnP算法能够在估计相机位姿的过程中更好地约束解空间
【参考知乎】EPNP
https://zhuanlan.zhihu.com/p/399140251






![[线程/C]基础](https://img-blog.csdnimg.cn/ea2c4eb0f6f44d8dbb2644cdcd6191f0.png)