改装KFC玩具——ESP32蓝牙无刷风扇
ESP32代码:
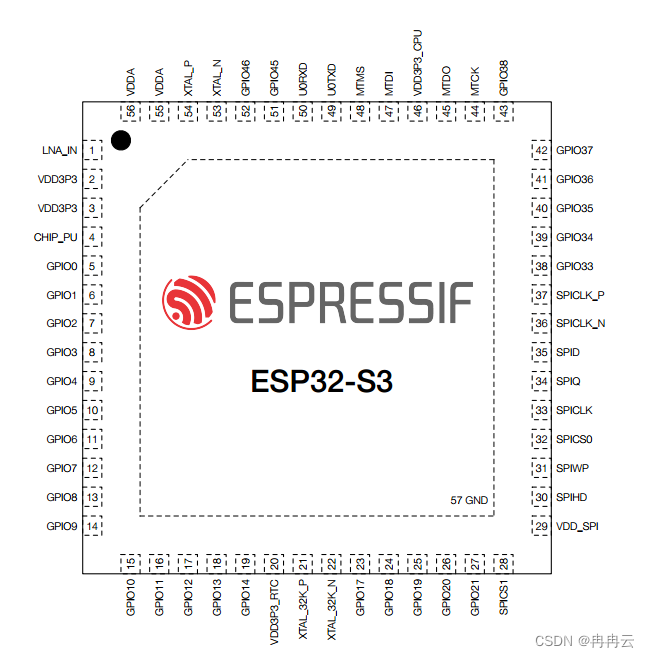
使用NodeMCU-32S
#define BLINKER_BLE
#include <Blinker.h>
#include <Arduino.h>
// PWM通道
int channel_PWM = 3;
// PWM频率,那么周期也就是1/50,也就是20ms ,PWM一共有16个通道,0-7位高速通道由80Mhz时钟驱动,后面8个为低速通道由1Mhz时钟驱动
int freq_PWM = 50;
// PWM分辨率,取值为 0-20 之间 ,这里填写为10,那么后面的ledcWrite 这个里面填写的pwm值就在 0 - 2的10次方 之间 也就是 0-1024 ,如果是要求不高的东西你可以直接拿1000去算了
int resolution_PWM = 10;
// 绑定的IO,在下面的绑定函数里面会用到,绑定之后这个IO就会变成我们PWM的输出口
const int PWM_Pin = 4; //指定pwm绑定到这个io上输出
BlinkerButton Button1("btn-abc");
BlinkerButton Button2("btn-1");
BlinkerSlider Slider0("Pwm");
BlinkerNumber Number1("num-abc");
int counter = 0;
void button1_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
digitalWrite(LED_BUILTIN, !digitalRead(LED_BUILTIN));
}
void button2_callback(const String & state)
{
BLINKER_LOG("get button state: ", state);
digitalWrite(0, !digitalRead(0));
}
void slider0_callback(int32_t value) //滑块0
{
int servo = 1000 - value;
ledcWrite(channel_PWM, servo);
}
void dataRead(const String & data)
{
BLINKER_LOG("Blinker readString: ", data);
counter++;
Number1.print(counter);
}
void setup()
{
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
ledcSetup(channel_PWM, freq_PWM, resolution_PWM); // 设置舵机通道
ledcAttachPin(PWM_Pin, channel_PWM); //将 LEDC 通道绑定到指定 IO 口上以实现输出
pinMode(LED_BUILTIN, OUTPUT);
digitalWrite(LED_BUILTIN, HIGH);
pinMode(0, OUTPUT);
digitalWrite(0, HIGH);
Blinker.begin();
Blinker.attachData(dataRead);
Button1.attach(button1_callback);
Button2.attach(button2_callback);
Slider0.attach(slider0_callback);
}
void loop()
{
Blinker.run();
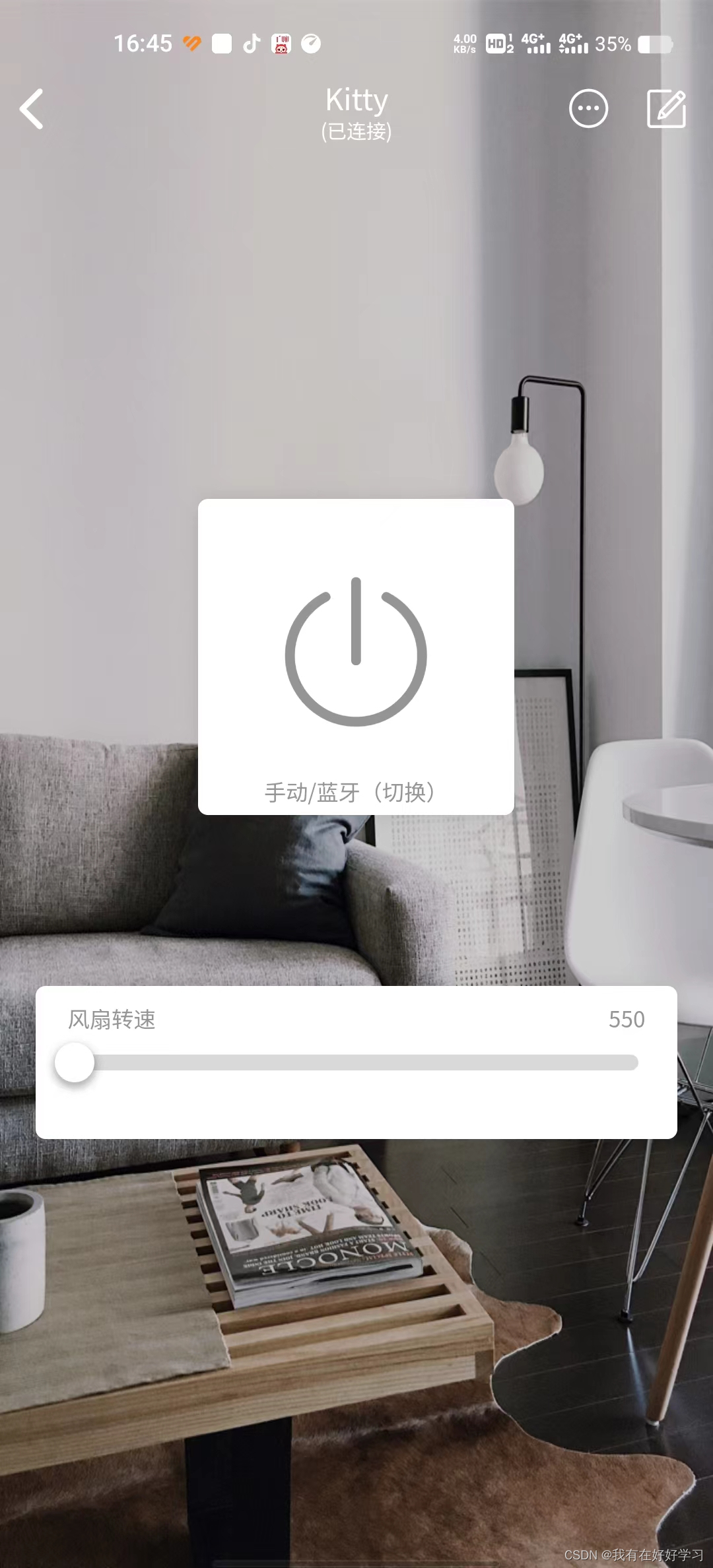
}Blinker界面:
PWM调速为0~1024,取550到650这个区间