这一章的内容主要讲并联机器人的相关算法,内容在全书中属于比较少,仅仅介绍概念的章节。
恰好部门中有一位同事就是专门做并联机器人出身的博士,也请他帮忙看了一下内容,但他觉得写书的这个人可能也不是非常懂并联机器人,他认为书里的一些内容表述的不是非常恰当。好在这节的内容偏向科普性质,而我司目前也并没有用到并联机器人,所以这节草草记录一下概念重点,等工作中如果遇到的时候再去深入,到时补充在这章。
概念
包含一个或多个环路的运动链叫闭链。
通过一组“腿”连接动静平台所组成的闭链机构叫并联机构。
Stewart-Gough平台(六条P关节支撑动静平面的并联机器人)目前广泛用在运动模拟器和六轴力或力矩传感器。
闭链特征:1.并非所有关节都需要驱动 2.关节变量必须满足若干约束方程。
驱动关节的数目如果超过机构自由度,即称为“冗余驱动”。
闭链机器人的正逆运动学
特点:与串联机器人相反,并联机器人的逆运动学相对简单,正运动学相对复杂,因为任意一组关节值可能不可行,或平台多组位移。
明确:正运动学的输入一定是驱动副。正是因为驱动副的作用下,非驱动副可能跑到不同的位置,这样导致末端(动平台)的位置不固定,所以并联机器人的正运动学可能有多解。
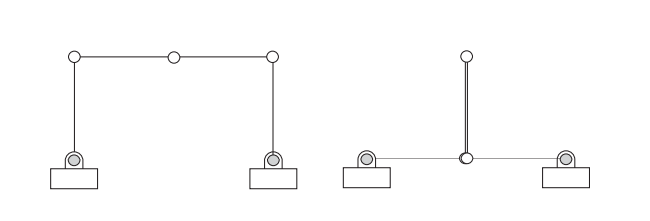
比如地面有两个驱动的R关节向上连着连杆,然后两个连杆上方各有一个被动的R关节,这俩被动的R关节又各引伸出一个连杆交会到中间的一个公共的被动R关节上。
可以想象一下这个下面俩主动关节,上面三个被动关节的口字形并联机器人,如果下面俩关节都往中间缩45度,那么上面的三个关节,两个连杆,可能向下伸,也可能向上伸。所以会导致多解。
那如果FK的输入连同被动副也送进去了,那就不可能是多解了,除非见鬼。当然很大概率是直接导致过约束,现在的机构满足不了你的要求,直接无解。
3-RPR平面并联机构
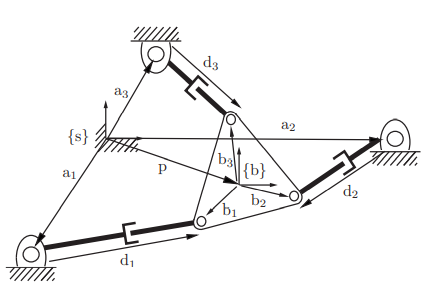
中间那个三角形即为动平台,逆解就是把向量串起来,涉及到的向量有pbad。
即:d=p+b-a
可以看到只有b向量是在{b}系下的,其他向量都在{s}系下,(这里中文版151页印刷错误)
因此这个等式相加,需要把所有的变量都转到同一个坐标系下。即b前面需要左乘Rsb,都转到S系下才方便相加。

我们观察此公式,发现d其实是逆解的结果,因为d是平动副P关节的变量,而Rsb,p是末端的位姿,ba是常量,所以逆运动学非常简单,直接算就好了。
那如果反过来,根据dba算p和Rsb,那就不那么简单。需要把上面的公式开平方算模长,(即dx和dy的平方是p关节的移动长度),再把sin和cos,用高等数学学过的替换公式代替:
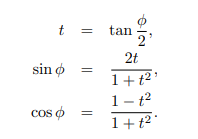
这样组成一套公式,把三条腿的s全代入,构造方程才能最终解出t和p,得到正解结果。
正解结果也可能不唯一,比如奇异位形:
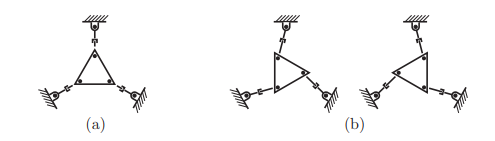
把腿伸长可能会让三角形顺时针或者逆时针转,或者直接把平台怼坏掉。。
Stewart-Gough平台
这个其实和平面3RPR并联机器人的解法是一样的,都是构建公式,
![]()
逆解和上面平面部分一样,正解则是假设一个矩阵R,和p,然后6条腿会得到六个约束方程(套入到上面的s平方公式里),然后再有个RRT=I的约束(会提供6个,参见第40页)也有六个约束,所以得到了12个方程组求解完才能得到正解结果。
一般并联机构
一个静平台,上面盯着三条腿,每条腿分别有n,m,p个R关节。
后面叙述的有些迷惑,我这里直接替作者重新描述:
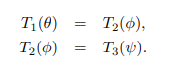
这里两个公式。
每个公式中:两矩阵相等,即12个变量相同,其实就是齐次矩阵去掉最后一行,剩12个元素,然后12个元素相等,就是12个方程。两个公式则是12*2=24个方程。
然后看约束有多少个,R是9个元素,但本质上只有3个自由变量,所以两个公式里各有3个旋转+3个平移=6个自由变量,一共12个自由变量,那么24个方程就提供了24-12=12个约束。
所以机构自由度就是n+m+p-12个自由度。(这里的12是来源于上一段算出来的12个约束)
好了,到这里就好了,上面说的感觉有问题,你觉得理解不清楚我也没办法,本来这里讲的就有点让人迷糊。
然后确定真正的腿长向量,反解各个关节就行了。文中“这不简单,可能有多解”,指的不是前文说的并联机器人的正解可能有多解,它实际指的是下面一条腿当作串联机器人看,逆解求关节角可能有多解。这里写的很迷糊,但不是翻译人员的锅,原书写的就很迷糊。
那么得到关节角后,在这个机构上算顶端的正解,实际上还是比较容易的。
微分运动学
概念:
1.只有驱动关节确定输入速度,被动关节由约束方程决定。
2.并联机器人除了前向运动学的雅可比矩阵,多了一个约束雅可比矩阵(其实就是逆运动学雅可比),即通过运动约束方程确定的雅可比矩阵。(求逆即可转为正运动学雅可比,当然不可逆则可以用伪逆来,参见IK这节:【现代机器人学】学习笔记五:逆运动学(Inverse kinematics)_zkk9527的博客-CSDN博客)
Stewart-Gough平台
速度学
学到这里以后其实我们都知道,在串联机器人里,得知关节速度,左乘前向运动学的雅可比矩阵,就能得到末端速度。
那么在这里,正解容易,反解困难,所以难的是通过平台速度算腿的速度。
所以这里就是,根据平台速度,左乘逆向运动学的雅可比矩阵,就能得到关节速度。
![]()
静力学
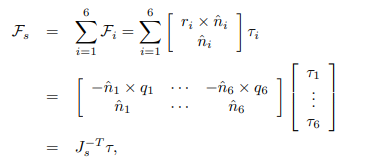
这里就是把力旋量(上面力矩,下面力)拆成6腿叠加的形式,然后n是力的方向,r是力臂,tao是力的大小(不同于串联机器人部分,这里tao是力而不是力矩)。
r作为力臂,是s系原点到球铰,基坐标系的球铰向量用q表示,不知道为什么推导的时候用了把位置调换然后加了负号,我猜可能是想写成串联机器人那块雅可比-wxq的形式一致。
回顾静力学部分:【现代机器人学】学习笔记四:一阶运动学与静力学_zkk9527的博客-CSDN博客
力旋量左乘雅可比的转置等于关节力矩
注意:
从关节空间转换至笛卡尔空间:
关节速度左乘雅可比为末端旋量,而关节力矩左乘雅可比的(逆转置)为末端力旋量
这个非常容易记错了,提到力,我们就说“逆转置”来记忆。
所以反过来,其实就是:
所以这个公式成立的,其中tau 可能是关节力矩,也可能是力。但这里是P关节提供支撑的力的,它不是旋转关节提供的,所以力旋量分别可以和力或者力矩通过雅可比矩阵建立联系。
那么在这里,J仍然是FK的雅可比矩阵。(可以看看对于这种平台的FK的雅可比原来可以这样算)
ps:这章安排有点奇怪,大题目是微分运动学,但这里又插入静力学的内容有点莫名其妙。
一般并联机构
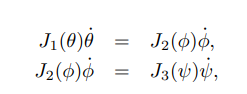
先提前说这节想干什么,以避免读者看晕:这一小节想用驱动副的速度推被动副的速度,这是串联机器人里用不到的。
这里还是,先让两个公式相等:
然后根据旋量和T的公式得到旋量相等,(其实完全可以直接旋量相等)
旋量等于雅可比左乘关节速度,所以得到
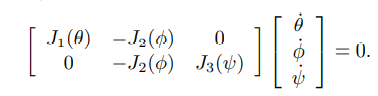
然后移项,用矩阵表示,得到:
然后改写矩阵,摘出驱动副和被动副(假设只有第一个关节是驱动副),得到:
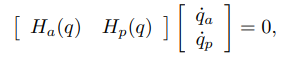
这里a是actuator,即驱动副,p是passive,则是被动副。
所以被动副速度就是:
![]()
只要被动副对应的Hp可逆,这里就能从驱动副的速度推算被动副的速度。
后面的内容写的挺拉跨的,感觉这个作者似乎确实也不太擅长讲并联机器人的理论,我认为不重要,就不放这里了。
并联机器人奇异
位形空间奇异
这个学术点讲,就是位形空间出现分叉点。这种会导致逆运动学的约束雅可比降秩。
驱动奇异
这个则看上面分开主动副和被动副部分的H矩阵(注意这个矩阵和雅可比矩阵有关,但是并不是雅可比矩阵),被动副部分的H矩阵不满秩,则是驱动奇异。
说白了,就是被动副可能出现不可预测运动的时候,就是驱动奇异。
那么驱动奇异又分为非退化奇异和退化奇异:
什么叫非退化呢,就是我最开始说的那个口字形的不可预测问题,关节不能随便活动(所以这里叫非退化),但是不可预测。即:驱动关节不能被独立驱动。
退化奇异则是关节能随便活动。即:锁定所有关节不能使系统保持刚性。
换驱动副就能解决这种奇异问题。
末端奇异
末端奇异就类似于我们常见的开链串联机器人的奇异了,就是末端不能执行某一方向的速度。
判断方法则是:先排除并联机器人的驱动奇异问题,然后像开链机器人那样,用雅可比矩阵是否满秩来确认是不是末端奇异。
末端奇异和驱动副选择无关。
确实,学完这节感觉,并联机器人变化无穷,比串联机器人要复杂很多。
这也可能是导致这节不能很详细的讲的原因,因为单独并联机器人就可以展开好几本书了。
不过暂时用不到那许多内容,因此目前先展开这些概念,后续有需要我再补充。

![[附源码]Python计算机毕业设计Django基于JEE平台springbt技术的订餐系统](https://img-blog.csdnimg.cn/6a16f75906a84a849dcfa3be5c7a9726.png)


![[附源码]Python计算机毕业设计Django基于vue+mysql开发的考试系统](https://img-blog.csdnimg.cn/036e0a868d5d45bfa48d78a934170b56.png)


![[附源码]Node.js计算机毕业设计辅导员班级量化管理系统Express](https://img-blog.csdnimg.cn/fdd15ce0e7674f9da484dec71674db06.png)