最近公司给了我一块Jetson Orin Nano的板子,让我搭建交叉编译环境,所以有了下面的文章
一 :Qt5.14.2交叉编译环境安装
1.准备
1.1设备环境
1.1.1 Server:
Ubuntu20.04:
Qt 源码 5.14.2
Qt 软件 5.14.2
gcc 版本 9.4.0
g++ 版本 9.4.01.1.2 Jetson Orin Nano :
Ubuntu 20.041.2 Qt相关下载地址
1.2.1 Qt源码下载
Qt源码下载(最好下载tar.xz,tar格式可能在windows下编辑过,后期可能会出现乱码的情况)
Index of /archive/qt/5.14/5.14.2/single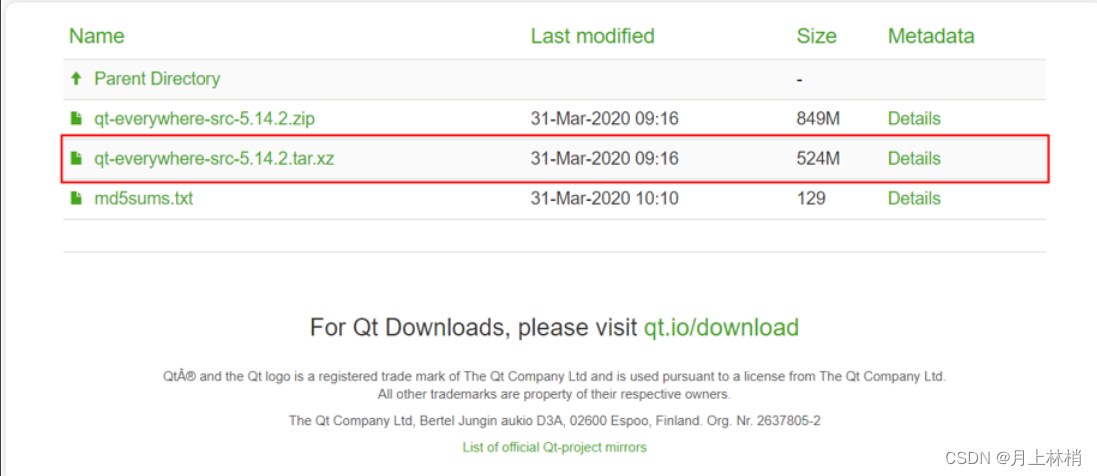
1.2.2 Qt软件下载地址
https://download.qt.io/archive/qt/5.14/5.14.2/

1.3 gcc和g++安装
Ubuntu 20.04系统默认安装g++和gcc版本是9.4.0,如果Ubuntu系统上没有g++和gcc安装命令:
sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu安装好之后查看版本(如下图)
aarch64-linux-gnu-gcc -v
aarch64-linux-gnu-g++ -v

1.4 Jetson Orin Nano Developer Kit 系统安装方法
Jetson 系统 自行安装
注意
- `SDK Manager`下使用的包是`JetPack5.1.1(rev.1);`
- 使用命令行安装使用的`BSP`包是`Jetson_Linux_R35.3.1_aarch64.tbz2`
`Sample Root Filesystem`是`Tegra_Linux_Sample-Root-Filesystem_R35.3.1_aarch64.tbz2`
2.Jetson Orin Nano Developer Kit 环境准备
2.1 设置root账号密码
sudo passwd root#设置Jetson Orin Nano root的账号密码2.2 设置ssh
开启ssh保证其它用户能够通过ssh root@ip 访问,开启ssh为了文件拷贝等操作。
2.3 更新资源列表
sudo apt-get update #只是更新了apt的资源列表,没有真正的对系统执行更新。apt-get update是同步 /etc/apt/sources.list 和 /etc/apt/sources.list.d 中列出的源的索引,这样才能获取到最新的软件包。
sudo apt-get upgrade #对比本地软件版本与源上软件版本,并更新本地版本到源上最新版本。2.4 安装Qt依赖库
2.4.1 安装Qt依赖库
sudo apt-get install '.*libxcb.*' libxrender-dev libxi-dev libfontconfig1-dev libudev-dev
sudo apt-get install libgles2-mesa-dev libgl1-mesa-dev2.4.2 软连接opengl es库
进入Jetson Orin Nano的/usr/lib/aarch64-linux-gnu/tegra-egl 目录,执行:
sudo ln -s libGLESv2_nvidia.so.2 libGLESv2.so
sudo ln -s libEGL_nvidia.so.0 libEGL.so实际上只是将这两个英伟达提供的 gl 动态库重命名,不同的设备厂商提供的支持库名字可能会有差异;
3.Server编译Qt源码
3.1 在server上安装交叉编译器并配置环境变量
3.1.1 安装命令:
sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu安装好后使用
which aarch64-linux-gnu-gc c#命令查看其安装位置我的位置在`/usr/bin/aarch64-linux-gnu-gcc `下
安装后面所需要的其它工具
sudo apt-get install git bison python gperf pkg-config
sudo apt-get install make libclang-dev build-essential 3.2 配置环境变量
编译/etc/profile文件,
sudo vim /etc/profile在编译模式下先按`i`进行文本插入,在文件底部加入` export PATH="/usr/bin:$PATH"`
然后按`ESC` 并输入`wq`保存。最后进行`source /etc/profile `更新环境变量,查看`/usr/bin`是否已经加入到环境变量,使用`echo ${PATH}`, 结果如下:
![]()
3.3 编译源码
3.3.1解压Qt源码
mkdir /opt/Qt5JetsonOrinNano
cd /opt/Qt5JetsonOrinNano
sudo chown username:username /opt/Qt5JetsonOrinNano#(username 是/home/ 下你的用户名) 修改Qt5JetsonOrinNano组
sudo tar xf qt-everywhere-src-5.14.2.tar.xz3.3.2 同步Jeston Orin Nano上的库到本地
在/opt/Qt5JetsonOrinNano目录下使用mkdir sysroot创建sysroot文件夹,然后同步Jetson Orin Nano上面的库到Server上
rsync -avz root@JetsonOrinNanoIp:/lib sysroot
rsync -avz root@ JetsonOrinNanoIp:/usr/include sysroot/usr
rsync -avz root@ JetsonOrinNanoIp:/usr/lib sysroot/usr3.3.3 修改sysroot软链接
在同步库后,然后需要修改sysroot里面的软链接,里面有很多软连接使用的都是绝对路径,那就会直接链接到你PC的/usr、/lib目录里面去,那肯定是错的,我们希望它们链接到 sysroot里面对应的库。所以我们需要把绝对路径改成相对路径。直接用网上现成的python脚本完成(有时会连接超时,自己想办法下载)。
sudo wget https://github.com/Kukkimonsuta/rpi-buildqt/blob/master/scripts/utils/sysroot-relativelinks.py脚本内容如下:
#!/usr/bin/env python
import sys
import os
# source: https://raw.githubusercontent.com/riscv/riscv-poky/master/scripts/sysroot-relativelinks.py
# Take a sysroot directory and turn all the absolute symlinks and turn them into
# relative ones such that the sysroot is usable within another system.
if len(sys.argv) != 2:
print("Usage is " + sys.argv[0] + "<directory>")
sys.exit(1)
topdir = sys.argv[1]
topdir = os.path.abspath(topdir)
def handlelink(filePath, subdir):
link = os.readlink(filePath)
if link[0] != "/":
return
if link.startswith(topdir):
return
newLink = os.path.relpath(topdir+link, subdir)
print("\t%s replacing %s => %s" % (filePath, link, newLink))
os.unlink(filePath)
os.symlink(newLink, filePath)
for subdir, dirs, files in os.walk(topdir):
for file in files:
filePath = os.path.join(subdir, file)
if os.path.islink(filePath):
handlelink(filePath, subdir)然后给sysroot-relativelinks.py添加权限
sudo chmod +x sysroot-relativelinks.py运行文件
./sysroot-relativelinks.py sysroot #修改sysroot下相关Lib的软链接
rsync -avz root@JetsonOrinNanoIp:/lib sysroot #我这是不放心又同步一次
rsync -avz root@ JetsonOrinNanoIp:/usr/include sysroot/usr
./sysroot-relativelinks.py sysroot3.3.4创建Jetson Orin Nano的qmake.conf文件
先查看devices下支持的设备
ls qt-everywhere-src-5.14.2/qtbase/mkspecs/devices/查看qt源码下支持的设备,由于没有 Nano 文件夹,我们使用相似的linux-jetson-tx1-g++`复制一份`jetson orin nano`的文件夹,
cp -r qt-everywhere-src-5.14.2/qtbase/mkspecs/devices/linux-jetson-tx1-g++/ qt-everywhere-src-5.14.2/qtbase/mkspecs/devices/linux-jetson-orin-nano/修改`qt-everywhere-src-5.14.2/qtbase/mkspecs/devices/linux-jetson-orin-nano/qmake.conf`文件,内容如下:
#
# qmake configuration for the Jetson Orin Nano boards running Linux For Tegra
#
# Note that this environment has been tested with X11 only.
#
# A typical configure line might look like:
# configure \
# -device linux-jetson-orin-nano \
# -device-option CROSS_COMPILE=/usr/bin/aarch64-linux-gnu- \
# -sysroot /opt/Qt5JetsonOrinNano/sysroot
include(../common/linux_device_pre.conf)
QMAKE_INCDIR_POST += \
$$[QT_SYSROOT]/usr/include \
$$[QT_SYSROOT]/usr/include/aarch64-linux-gnu
QMAKE_LIBDIR_POST += \
$$[QT_SYSROOT]/usr/lib \
$$[QT_SYSROOT]/lib/aarch64-linux-gnu \
$$[QT_SYSROOT]/usr/lib/aarch64-linux-gnu
QMAKE_RPATHLINKDIR_POST += \
$$[QT_SYSROOT]/usr/lib \
$$[QT_SYSROOT]/usr/lib/aarch64-linux-gnu \
$$[QT_SYSROOT]/lib/aarch64-linux-gnu
QMAKE_INCDIR_EGL = $$[QT_SYSROOT]/usr/lib/aarch64-linux-gnu/tegra-egl
DISTRO_OPTS += aarch64
COMPILER_FLAGS += -march=armv8-a+crc+crypto
EGLFS_DEVICE_INTEGRATION = eglfs_kms_egldevice
include(../common/linux_arm_device_post.conf)
load(qt_config)3.3.5建立编译文件夹
mkdir Qt5Build
cd Qt5Build配置make 的编译环境
sudo ../qt-everywhere-src-5.14.2/configure -opengl es2 -xcb -device linux-jetson-orin-nano -device-option CROSS_COMPILE=/usr/bin/aarch64-linux-gnu- -sysroot /opt/Qt5JetsonOrinNano/sysroot -prefix /usr/local/Qt5JetsonOrinNano -opensource -confirm-license -skip qtmultimedia -skip qtscript -skip qtwebengine -force-debug-info -skip qtdatavis3d -skip qtlocation -nomake examples -make libs -pkg-config -no-eglfs -no-use-gold-linker -v出现错误([(1条消息) Ubuntu18源码编译安装qt5.15.3和MeshLab踩坑_error: feature 'xcb' was enabled, but the pre-cond_JaceYangg的博客-CSDN博客]
ERROR: Feature 'xcb' was enabled, but the pre-condition 'features.thread &&..... #出现这个问题,把上面命令中的 -xcb-xlib配置项去掉。可以-xcb 不删除。sudo apt-get install '^libxcb.*-dev' libx11-xcb-dev libglu1-mesa-dev libxrender-dev libxi-dev libxkbcommon-dev libxkbcommon-x11-dev如果还有问题,再查找其解决方案
编译:
sudo make -j4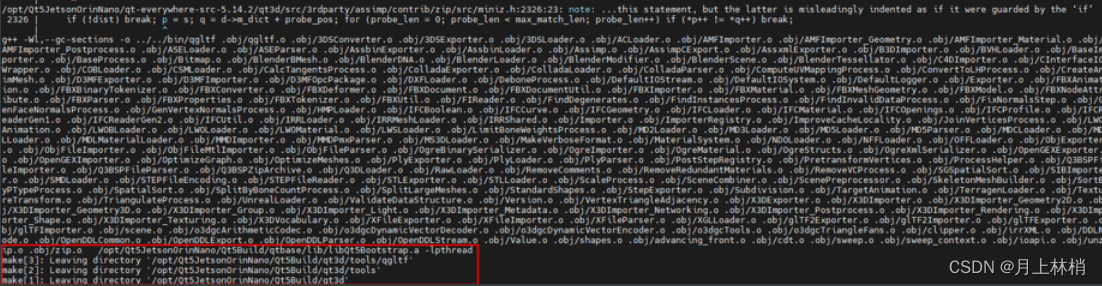
等待编译完成之后再进行安装
sudo make install
安装后的目录如下:

查看编译生成目录下的qmake是否存在,用于配置qtcreator的qmake环境
![]()
把编译生成的相关库同步到Jetson Orin Nano上。
sudo rsync -avz sysroot/usr/local/Qt5JetsonOrinNano root@ JetsonOrinNanoIp:/usr/local至此QT源码编译完成。
4.Server交叉编译代码到Jetson Orin Nano上
4.1 在Server上创建一个`test`文件夹
mkdir testCrossCompiler &&cd testCrossCompiler
touch hello.cpp
vim hello.cpp#include <QCoreApplication>
#include <QDebug>
int main(int argc, char *argv[])
{
QCoreApplication a(argc, argv);
qDebug() << "Hello World";
return a.exec();
}4.2使用编译Qt源码生成的qmake编译项目 生成.pro文件
4.2.1 在testCrossCompiler目录下使用`qmake`命令
/opt/Qt5JetsonOrinNano/sysroot/usr/local/Qt5JetsonOrinNano/bin/qmake -project![]()
4.2.2 使用`qmake`生成`Makefile`文件

4.2.3 使用命令`make`生成`arm`文件

4.2.4 拷贝文件到`Jetson Orin Nano`上运行
scp ./testCrossCompiler nvidia@JetsonOrinNanoIp:/home/nvidia/Downloads/test4.2.5 在Jetson Orin Nano上运行编译生成的文件
./testCrossCompiler
下面会出Server上配置ARM的交叉编译环境。
好久没有写文章了。上面的应该勉强能看。如有问题请提出,我不会修改的(哈哈)。如果按照步骤弄不成,多找找自身的原因(手动滑稽)。
最后最后,有问题请在评论区提出,我会帮助解决。感谢查看