👨🎓作者简介:一位即将上大四,正专攻机器学习的保研er
🌌上期文章:机器学习&&深度学习——自注意力和位置编码(数学推导+代码实现)
📚订阅专栏:机器学习&&深度学习
希望文章对你们有所帮助
transformer(机器翻译的再实现)
- 引入
- 模型
- 基于位置的前馈网络
- 残差连接和层规范化
- 为何使用层规范化
- 编码器
- 解码器
- 训练
- 小结
引入
上一节比较了CNN、RNN和self-attention。容易知道,自注意力同时具有并行计算力强和最大路径长度的两个有点,因此使用self-attention来设计模型架构是很有吸引力的。
而transformer模型就是完全基于注意力机制,且其没有任何的卷积层和循环神经网络层。transformer最初是应用在文本数据上的序列到序列学习,现在也已经推广到了语言、视觉、语音和强化学习等领域。
而在之前,我们已经使用了seq2seq来实现了英语到法语的翻译,那时候发现训练后的效果并不是很好,接下来将边讲解transformer边用transformer来进行机器翻译。
模型
transformer是编码器-解码器架构的一个实例,整体实例的架构图如下所示:
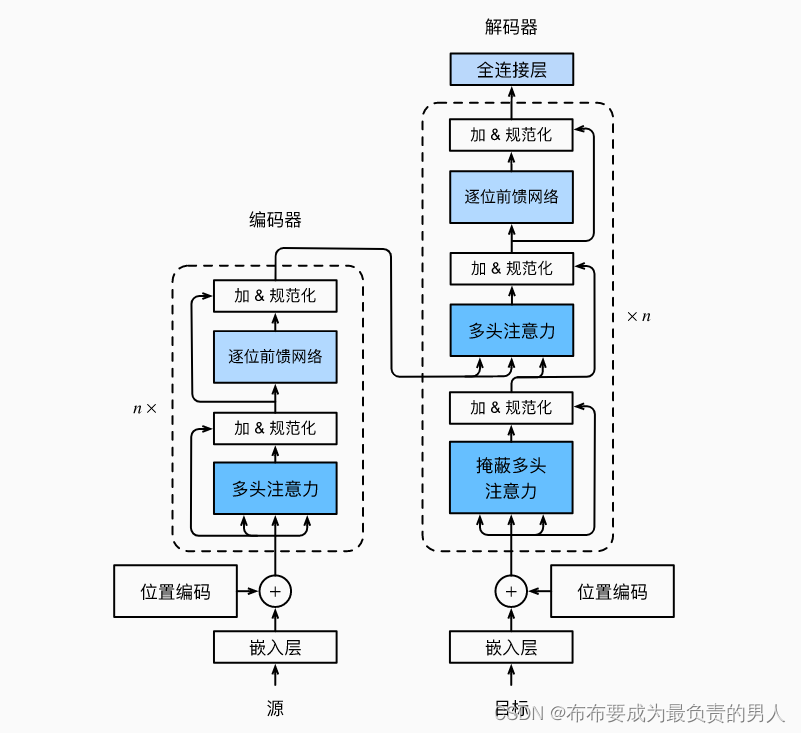
可以看出transformer的编码器和解码器时基于自注意力的模块叠加而成的,源(输入)序列和目标(输出)序列的嵌入(embedding)表示将加上位置编码,再分别输入到编码器和解码器中。
宏观角度上进行结构上的解释,transformer的编码器是由多个相同的层叠加而成的,每个层都有两个子层(sublayer)。第一个子层是多头注意力(multi-head self-attention)池化;第二个子层是基于位置的前馈网络(positionwise feed-forward network(FFT))。也就是说,计算编码器的自注意力时,查询、键和值都来自前一个编码器层的输出。
受残差网络ResNet的启发(具体可以自行去了解一下原理,主要优点是残差网络的使用使得模型更容易优化),每个子层都使用了残差连接。在transformer中,对于序列中任何位置的任何输入x∈Rd,都要求满足sublayer(x)∈Rd,一遍残差连接满足x+sublayer(x)∈Rd。在残差连接的加法运算后,要紧接着进行应用层规范化(layer normalization)。因此,输入序列对应的每个位置,编码器都将输出一个d维表示向量。
transformer的解码器也是由多个相同的层叠加而成的,也使用了残差连接和层规范化。除了编码器中描述的两个子层之外,解码器还在这两个子层之间插入了第三个子层,称为编码器-解码器注意力层。这个层的query为前一解码器层的输出,而key和value都是来自编码器的输出。在解码器自注意力中,query、key、value都来自上一个解码器层的输出。但是解码器中的每个位置只能考虑该位置之前的所有位置,这和我们之前见过的掩蔽很相似,事实上这种掩蔽注意力就保留了自回归属性,确保预测仅仅依赖于已生成的输出词元。
import math
import pandas as pd
import torch
from torch import nn
from d2l import torch as d2l
基于位置的前馈网络
基于位置的前馈网络对序列中的所有位置的表示进行变换时使用的是同一个多层感知机(MLP),这就是称前馈网络是基于位置的原因。下面进行实现,下面代码中,输入X的形状为(批量大小,时间步数或序列长度,隐单元数或特征维度)将被一个两层感知机转换成形状为(批量大小,时间步数,ffn_num_outputs)的输出张量。
#@save
class PositionWiseFFN(nn.Module):
"""基于位置的前馈网络"""
def __init__(self, ffn_num_input, ffn_num_hiddens, ffn_num_outputs,
**kwargs):
super(PositionWiseFFN, self).__init__(**kwargs)
self.dense1 = nn.Linear(ffn_num_input, ffn_num_hiddens)
self.relu = nn.ReLU()
self.dense2 = nn.Linear(ffn_num_hiddens, ffn_num_outputs)
def forward(self, X):
return self.dense2(self.relu(self.dense1(X)))
残差连接和层规范化
现在关注加法和规范化(add&norm)组件,如前面所说,这是由残差连接和紧随其后的层规范化组成的,这两个都是关键。
规范化也叫归一化,他将其改变成均值为0方差为1。
在计算机视觉中,常用批量规范化,也就是在一个小批量的样本内基于批量规范化对数据进行重新中心化和重新缩放的调整。层规范化是基于特征维度进行规范化。而在NLP(输入通常是变长序列)中通常使用层规范化。
为何使用层规范化
也就是为啥使用LayerNorm而不使用BatchNorm呢?如下图:
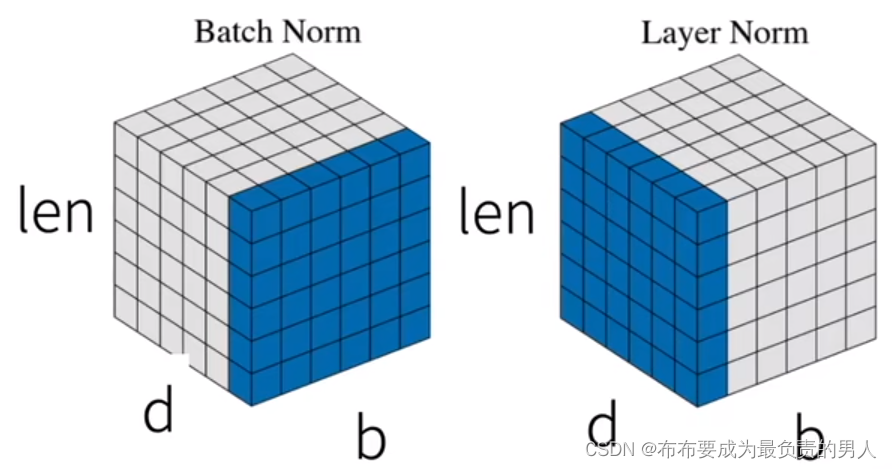
其中,b为batch_size也就是批量大小,len是指代序列的长度。
那么我们知道,批量规范化是对每个特征/通道里的元素进行归一化,把d规范化了,len留着,但是对于序列长度会变的NLP并不适合,这样就会不稳定。
而层规范化则是对每个样本里面的元素进行规范化,相对更稳定。
通过以下的代码来对比不同维度的层规范化和批量规范化的效果:
ln = nn.LayerNorm(2)
bn = nn.BatchNorm1d(2)
X = torch.tensor([[1, 2], [2, 3]], dtype=torch.float32)
# 在训练模式下计算X的均值和方差
print('layer norm:', ln(X), '\nbatch norm:', bn(X))
运行结果:

可以很清楚看出来,使用层规范化以后,会对每一个批量中的每一个样本的不同特征来进行规范化;使用批量规范化以后,会对每一个批量中的每个样本的同一特征来进行规范化。
接着就可以使用残差连接和层规范化来实现AddNorm类,dropout也被作为正则化方法使用:
#@save
class AddNorm(nn.Module):
"""残差连接后进行层规范化"""
def __init__(self, normalized_shape, dropout, **kwargs):
super(AddNorm, self).__init__(**kwargs)
self.dropout = nn.Dropout(dropout)
self.ln = nn.LayerNorm(normalized_shape)
def forward(self, X, Y):
return self.ln(self.dropout(Y) + X)
残差连接要求两个输入的形状相同,以便加法操作后输出张量的形状相同。
add_norm = AddNorm([3, 4], 0.5)
add_norm.eval()
print(add_norm(torch.ones((2, 3, 4)), torch.ones((2, 3, 4))).shape)
输出结果:
torch.Size([2, 3, 4])
编码器
有了组成Transformer编码器的基础组件,现在可以先实现编码器中的一个层。下面的EncoderBlock类包含两个子层:多头自注意力和基于位置的前馈网络,这两个子层都使用了残差连接和紧随的层规范化。
#@save
class EncoderBlock(nn.Module):
"""Transformer编码器块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, use_bias=False, **kwargs):
super(EncoderBlock, self).__init__(**kwargs)
self.attention = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout,
use_bias)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(
ffn_num_input, ffn_num_hiddens, num_hiddens)
self.addnorm2 = AddNorm(norm_shape, dropout)
def forward(self, X, valid_lens):
Y = self.addnorm1(X, self.attention(X, X, X, valid_lens))
return self.addnorm2(Y, self.ffn(Y))
下面实现的Transformer编码器的代码中,堆叠了num_layers个EncoderBlock类的实例。由于这里使用的是值范围在-1和1之间的固定位置编码,因此通过学习得到的输入的嵌入表示的值需要先乘以嵌入维度的平方根进行重新缩放,然后再与位置编码相加。
#@save
class TransformerEncoder(d2l.Encoder):
"""Transformer编码器"""
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, use_bias=False, **kwargs):
super(TransformerEncoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
EncoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, use_bias))
def forward(self, X, valid_lens, *args):
# 因为位置编码值在-1和1之间,
# 因此嵌入值乘以嵌入维度的平方根进行缩放,
# 然后再与位置编码相加。
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
self.attention_weights = [None] * len(self.blks)
for i, blk in enumerate(self.blks):
X = blk(X, valid_lens)
self.attention_weights[
i] = blk.attention.attention.attention_weights
return X
解码器
Transformer解码器也是由多个相同的层组成,在DecoderBlock类中实现的每个层包含了三个子层:解码器自注意力、“编码器-解码器”注意力和基于位置的前馈网络。这些子层也都被残差连接和紧随的层规范化围绕。
在掩蔽多头解码器自注意力层(第一个子层)中,查询、键和值都来自上一个解码器层的输出。关于序列到序列模型(sequence-to-sequence model),在训练阶段,其输出序列的所有位置(时间步)的词元都是已知的;然而,在预测阶段,其输出序列的词元是逐个生成的。
因此,在任何解码器时间步中,只有生成的词元才能用于解码器的自注意力计算中。为了在解码器中保留自回归的属性,其掩蔽自注意力设定了参数dec_valid_lens,以便任何查询都只会与解码器中所有已经生成词元的位置(即直到该查询位置为止)进行注意力计算。
class DecoderBlock(nn.Module):
"""解码器中第i个块"""
def __init__(self, key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
dropout, i, **kwargs):
super(DecoderBlock, self).__init__(**kwargs)
self.i = i
self.attention1 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm1 = AddNorm(norm_shape, dropout)
self.attention2 = d2l.MultiHeadAttention(
key_size, query_size, value_size, num_hiddens, num_heads, dropout)
self.addnorm2 = AddNorm(norm_shape, dropout)
self.ffn = PositionWiseFFN(ffn_num_input, ffn_num_hiddens,
num_hiddens)
self.addnorm3 = AddNorm(norm_shape, dropout)
def forward(self, X, state):
enc_outputs, enc_valid_lens = state[0], state[1]
# 训练阶段,输出序列的所有词元都在同一时间处理,
# 因此state[2][self.i]初始化为None。
# 预测阶段,输出序列是通过词元一个接着一个解码的,
# 因此state[2][self.i]包含着直到当前时间步第i个块解码的输出表示
if state[2][self.i] is None:
key_values = X
else:
key_values = torch.cat((state[2][self.i], X), axis=1)
state[2][self.i] = key_values
if self.training:
batch_size, num_steps, _ = X.shape
# dec_valid_lens的开头:(batch_size,num_steps),
# 其中每一行是[1,2,...,num_steps]
dec_valid_lens = torch.arange(
1, num_steps + 1, device=X.device).repeat(batch_size, 1)
else:
dec_valid_lens = None
# 自注意力
X2 = self.attention1(X, key_values, key_values, dec_valid_lens)
Y = self.addnorm1(X, X2)
# 编码器-解码器注意力。
# enc_outputs的开头:(batch_size,num_steps,num_hiddens)
Y2 = self.attention2(Y, enc_outputs, enc_outputs, enc_valid_lens)
Z = self.addnorm2(Y, Y2)
return self.addnorm3(Z, self.ffn(Z)), state
现在我们构建了由num_layers个DecoderBlock实例组成的完整的Transformer解码器。最后,通过一个全连接层计算所有vocab_size个可能的输出词元的预测值。解码器的自注意力权重和编码器解码器注意力权重都被存储下来,方便日后可视化的需要。
class TransformerDecoder(d2l.AttentionDecoder):
def __init__(self, vocab_size, key_size, query_size, value_size,
num_hiddens, norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, num_layers, dropout, **kwargs):
super(TransformerDecoder, self).__init__(**kwargs)
self.num_hiddens = num_hiddens
self.num_layers = num_layers
self.embedding = nn.Embedding(vocab_size, num_hiddens)
self.pos_encoding = d2l.PositionalEncoding(num_hiddens, dropout)
self.blks = nn.Sequential()
for i in range(num_layers):
self.blks.add_module("block"+str(i),
DecoderBlock(key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens,
num_heads, dropout, i))
self.dense = nn.Linear(num_hiddens, vocab_size)
def init_state(self, enc_outputs, enc_valid_lens, *args):
return [enc_outputs, enc_valid_lens, [None] * self.num_layers]
def forward(self, X, state):
X = self.pos_encoding(self.embedding(X) * math.sqrt(self.num_hiddens))
self._attention_weights = [[None] * len(self.blks) for _ in range (2)]
for i, blk in enumerate(self.blks):
X, state = blk(X, state)
# 解码器自注意力权重
self._attention_weights[0][
i] = blk.attention1.attention.attention_weights
# “编码器-解码器”自注意力权重
self._attention_weights[1][
i] = blk.attention2.attention.attention_weights
return self.dense(X), state
@property
def attention_weights(self):
return self._attention_weights
训练
依照Transformer架构来实例化编码器-解码器模型。在这里,指定Transformer的编码器和解码器都是2层,都使用4头注意力。为了进行序列到序列的学习,下面将在之前所说的机器翻译数据集上进行transformer模型的训练。
num_hiddens, num_layers, dropout, batch_size, num_steps = 32, 2, 0.1, 64, 10
lr, num_epochs, device = 0.005, 200, d2l.try_gpu()
ffn_num_input, ffn_num_hiddens, num_heads = 32, 64, 4
key_size, query_size, value_size = 32, 32, 32
norm_shape = [32]
train_iter, src_vocab, tgt_vocab = d2l.load_data_nmt(batch_size, num_steps)
encoder = TransformerEncoder(
len(src_vocab), key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
num_layers, dropout)
decoder = TransformerDecoder(
len(tgt_vocab), key_size, query_size, value_size, num_hiddens,
norm_shape, ffn_num_input, ffn_num_hiddens, num_heads,
num_layers, dropout)
net = d2l.EncoderDecoder(encoder, decoder)
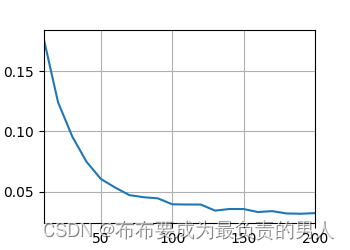
d2l.train_seq2seq(net, train_iter, lr, num_epochs, tgt_vocab, device)
d2l.plt.show()
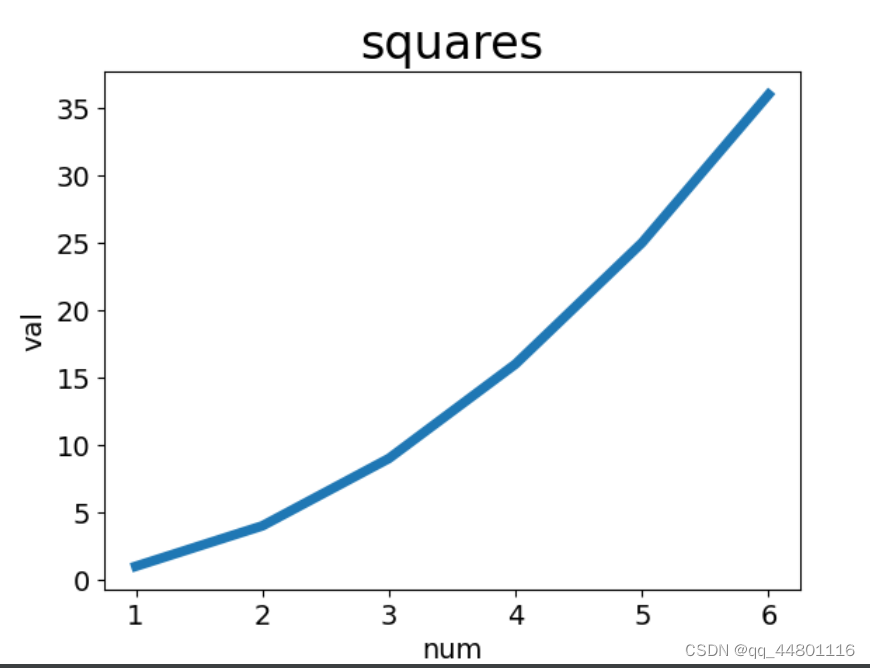
运行输出:
loss 0.032, 5786.9 tokens/sec on cpu
运行图片:
训练完后,我们可以将一些英语句子翻译成法语,并且计算翻译后的BLEU分数(和之前的seq2seq实现的训练模型一样的计算方式):
engs = ['go .', "i lost .", 'he\'s calm .', 'i\'m home .']
fras = ['va !', 'j\'ai perdu .', 'il est calme .', 'je suis chez moi .']
for eng, fra in zip(engs, fras):
translation, dec_attention_weight_seq = d2l.predict_seq2seq(
net, eng, src_vocab, tgt_vocab, num_steps, device, True)
print(f'{eng} => {translation}, ',
f'bleu {d2l.bleu(translation, fra, k=2):.3f}')
运行结果:
go . => va !, bleu 1.000
i lost . => j’ai perdu ., bleu 1.000
he’s calm . => il est mouillé ., bleu 0.658
i’m home . => je suis chez moi ., bleu 1.000
这次的效果比起上一次明显还是好了很多的。
小结
1、Transformer是编码器-解码器架构的一个实践,尽管在实际情况中编码器或解码器可以单独使用。
2、在Transformer中,多头自注意力用于表示输入序列和输出序列,不过解码器必须通过掩蔽机制来保留自回归属性。
3、Transformer中的残差连接和层规范化是训练非常深度模型的重要工具。
4、Transformer模型中基于位置的前馈网络使用同一个多层感知机,作用是对所有序列位置的表示进行转换。