pcl点云处理
1.安装
系统: ubuntu20.04
方法1. 直接命令行方式安装
sudo apt-get install libpcl-dev
ubuntu20.04下默认的pcl版本是1.10. 头文件路径在/usr/include/pcl-1.10/

方法2.源码编译安装
推荐源码安装,我们安装1.12.1版本,直接运行脚本pcl_install.sh,脚本内容如下:
# pcl_install.sh
sudo apt-get update
sudo apt-get install git build-essential linux-libc-dev
sudo apt-get install cmake cmake-gui
sudo apt-get install libusb-1.0-0-dev libusb-dev libudev-dev
sudo apt-get install mpi-default-dev openmpi-bin openmpi-common
sudo apt-get install libflann-dev
sudo apt-get install libeigen3-dev
sudo apt-get install libboost-all-dev
sudo apt-get install libvtk7-dev libvtk7-qt-dev
sudo apt-get install libqhull* libgtest-dev
sudo apt-get install freeglut3-dev pkg-config
sudo apt-get install libxmu-dev libxi-dev
sudo apt-get install mono-complete
sudo apt-get install openjdk-8-jdk openjdk-8-jre
if [ ! -d "~/apps/" ];then
mkdir -p ~/apps/
else
echo "文件夹已经存在"
fi
cd ~/apps
wget https://github.com/PointCloudLibrary/pcl/archive/refs/tags/pcl-1.12.1.tar.gz
tar -zxvf pcl-1.12.1.tar.gz
cd pcl-pcl-1.12.1
mkdir build && cd build
cmake -DCMAKE_BUILD_TYPE=Release ..
make -j6
sudo make install
编译完,默认的头文件的路径在/usr/local/include/pcl-1.12:

测试:
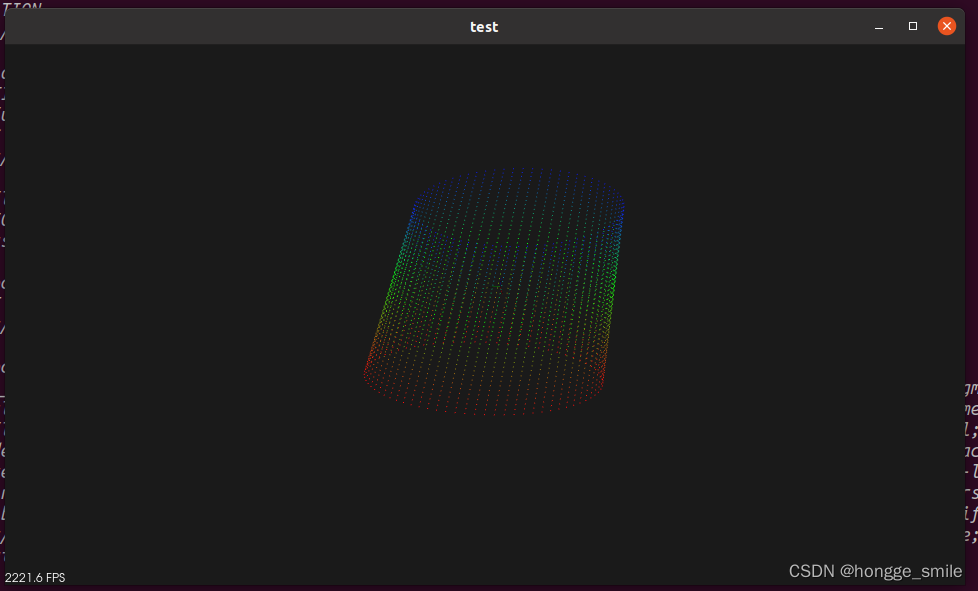
源码编译pcl以后,我们写一个小的测试程序,验证是否安装成功:
pcl_test.cpp内容如下:
//pcl_test.cpp
#include <iostream>
#include "pcl/common/common_headers.h"
#include "pcl/io/pcd_io.h"
#include "pcl/visualization/pcl_visualizer.h"
#include "pcl/visualization/cloud_viewer.h"
#include "pcl/console/parse.h"
using namespace pcl;
int main(int argc, char **argv) {
std::cout << "Test PCL !!!" << std::endl;
pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);
uint8_t r(255), g(15), b(15);
for (float z(-1.0); z <= 1.0; z += 0.05)
{
for (float angle(0.0); angle <= 360.0; angle += 5.0)
{
pcl::PointXYZRGB point;
point.x = 0.5 * cosf (pcl::deg2rad(angle));
point.y = sinf (pcl::deg2rad(angle));
point.z = z;
uint32_t rgb = (static_cast<uint32_t>(r) << 16 |
static_cast<uint32_t>(g) << 8 | static_cast<uint32_t>(b));
point.rgb = *reinterpret_cast<float*>(&rgb);
point_cloud_ptr->points.push_back (point);
}
if (z < 0.0)
{
r -= 12;
g += 12;
}
else
{
g -= 12;
b += 12;
}
}
point_cloud_ptr->width = (int) point_cloud_ptr->points.size ();
point_cloud_ptr->height = 1;
pcl::visualization::CloudViewer viewer ("test");
viewer.showCloud(point_cloud_ptr);
while (!viewer.wasStopped()){ };
return 0;
}
CMakeLists.txt内容如下:
cmake_minimum_required(VERSION 3.16)
project(pcl_test)
find_package(PCL 1.12 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
add_executable(pcl_test pcl_test.cpp)
target_link_libraries (pcl_test ${PCL_LIBRARIES})
编译运行,效果如下:
2.pcl学习资料
官网:https://pointclouds.org/
pcl官方github:https://github.com/PointCloudLibrary/pcl
github上的demo:https://github.com/HuangCongQing/pcl-learning
PCL学习指南&资料推荐: https://zhuanlan.zhihu.com/p/268524083
3.pcl各模块介绍及demo程序
4.工业应用实战
参考链接
持续更新。。。。。



![[附源码]Python计算机毕业设计SSM基于JAVA语言的宠物寄养管理(程序+LW)](https://img-blog.csdnimg.cn/b106f4b83f3141ec938f60d3336b7295.png)

![[附源码]Python计算机毕业设计SSM基于web的社团管理系统(程序+LW)](https://img-blog.csdnimg.cn/8ad3feb0d56b4a108c6490c7be94721b.png)

![[附源码]计算机毕业设计的小说阅读系统Springboot程序](https://img-blog.csdnimg.cn/73d5602892d74fe2828e44483b16f316.png)