ARiADNE:A Reinforcement learning approach using Attention-based Deep Networks for Exploration
文章目录
- ARiADNE:A Reinforcement learning approach using Attention-based Deep Networks for Exploration
- 机器人自主探索(ARE)
- ARE的传统边界法
- 非短视路径
- 深度强化学习的方法的积极意义
- 问题定义
- 方法
- 强化学习问题映射建模
- 策略网络
- 训练
- Soft Actor-critic
- 训练细节
参考论文:Cao Y, Hou T, Wang Y, et al. Ariadne: A reinforcement learning approach using attention-based deep networks for exploration[J]. arXiv preprint arXiv:2301.11575, 2023.
2023 IEEE International Conference on Robotics and Automation (ICRA 2023)
机器人自主探索(ARE)
ARE的传统边界法
自主机器人探索(Autonomous robot exploration, ARE)
目标: ARE的目标是规划完成探索的最短路径,其中最终地图中的小噪音/错误是可以容忍的
任务要点: ARE的任务要点是规划一条非短视路径,平衡探索环境(即在已经探索过的区域中优化地图)和探索新区域(通常是更远的区域)之间的权衡,最重要的是只对环境有部分了解。这样的勘探路径通常是增量在线规划的,因为局部地图会使用沿途的新测量来更新
传统基于边界的方法: 传统的基于边界的方法生成多条候选路径,每条路径覆盖一个边界(即已探索的自由区域与未探索区域之间的边界),并贪婪地选择具有最大收益的路径,通常定义为效用(即沿路径可观察的边界数量)和成本(即路径长度)的组合。
局限性:这种短视的边界选择并不能保证长期的最优性。由于环境只是部分已知的,所以之前的最佳路径往往会随着更多环境的暴露而变得次优,或者更糟的是,导致冗余的移动(例如,错过了两个房间之间未探索的捷径,而这两个房间之前并不知道是相连的)。
非短视路径
空间非短视要求规划者对当前的局部地图进行推理,以平衡探索与开发之间的权衡
时间非短视: 要求规划者估计当前决策对未来的影响(例如,预测可能源于给定路径规划决策的局部地图的变化)。
深度强化学习的方法的积极意义
发掘局部地图依赖关系:
基于深度强化学习(DRL)的ARE方法,在注意力机制的加持下,允许智能体在不同的空间尺度上推理局部地图中不同区域的依赖关系,从而允许智能体在不需要优化长路径的情况下有效地对空间非近视决策进行排序。
发掘潜在区域:
Critic网络隐含地为机器人提供了通过学习状态值来估计可能发现的潜在区域的能力,这进一步有助于做出有利于长期效率的决策,从而解决暂时非近视问题。
方法示例:
首先将自主探索表述为覆盖已知可穿越区域的无碰撞图上的顺序决策问题,其中一个节点是机器人的当前位置。然后,使用基于注意力的神经网络选择机器人当前位置的一个相邻节点作为机器人的下一个视点。
问题定义
环境 E \mathcal{E} E,由 x × y x\times y x×y的2D占据栅格地图表示
栅格地图
P
P
P,未知区域为
P
u
P_u
Pu,已知区域为
P
k
P_k
Pk,自由区域为
P
f
P_f
Pf,障碍物区域
P
o
P_o
Po,存在以下关系:
P
f
∈
P
k
P
o
∈
P
k
P
u
∪
P
k
=
P
P
f
∪
P
o
=
P
k
P_f\in P_k\\P_o\in P_k\\P_{u} \cup P_{k}=P\\P_{f} \cup P_{o}=P_{k}
Pf∈PkPo∈PkPu∪Pk=PPf∪Po=Pk
初始状态地图完全未知 P = P u P=P_u P=Pu
探索过程通过传感器的测量(测量范围为 d s d_s ds)将未知区域分类成自由区域和占据区域
机器人寻找最短的无碰撞轨迹
ψ
∗
\psi^{*}
ψ∗
ψ
∗
=
argmin
ψ
∈
Ψ
C
(
ψ
)
,
s.t.
P
k
=
P
g
\psi^{*}=\underset{\psi \in \Psi}{\operatorname{argmin}} \mathrm{C}(\psi), \text { s.t. } P_{k}=P_{g}
ψ∗=ψ∈ΨargminC(ψ), s.t. Pk=Pg
对于
C
C
C函数,
ψ
→
R
+
\psi \rightarrow \mathbb{R}^{+}
ψ→R+将轨迹映射成为其长度和groud-truth
P
g
P_g
Pg。
尽管在真实世界的部署中无法获得基本事实,但它是已知的,并且可以用于评估测试中的计划器的性能。在实际中,大多数工作将占用区域的闭集视为 P k = P g P_k = P_g Pk=Pg
方法
强化学习问题映射建模
问题定义:
由于自由区域的更新视基于机器人的移动,在线的ARE的规划实际上是一个序贯决策问题,根据之前的工作[20]进行信息路径规划,我们将机器人轨迹 ψ ψ ψ视为视点序列 ψ = ( ψ 0 , ψ 1 , … ) , ψ i ∈ P f ψ = (ψ_0, ψ_1,…),ψ_i∈P_f ψ=(ψ0,ψ1,…),ψi∈Pf
序贯决策问题:
在每个决策步骤t中,首先在当前自由区域 P f P_f Pf中均匀分布候选视点 V t = { v 0 , v 1 , … } , ∀ v i = ( x i , y i ) ∈ P f Vt=\{v_0,v_1,\ldots\},∀v_i=(x_i, y_i)∈P_f Vt={v0,v1,…},∀vi=(xi,yi)∈Pf。然后,为了找到视点之间的无碰撞路径,通过一条直线将每个视点与其k个最近的邻居连接起来,并去除与已占用或未知区域碰撞的边缘。在此过程中,构建一个无碰撞图 G t = ( V t , E t ) G_t = (V_t, E_t) Gt=(Vt,Et),其中 V t V_t Vt是自由区域上均匀分布的一组节点(即视点),而是 E t E_t Et一组可遍历的边。最后让机器人选择其当前位置的一个相邻节点作为下一个视点。由于决策将在到达最后选定的视点时做出,因此轨迹是一系列航路点,使得 ψ i ∈ V ψ_i∈V ψi∈V。
观测:
智能体的观测值 o t = ( G t ′ , ψ t ) o_t=(G_t^{\prime},\psi_t) ot=(Gt′,ψt), G t ′ = ( V t ′ , E t ) G^\prime_t=(V_t^{\prime},E_t) Gt′=(Vt′,Et)是无碰撞图 G t G_t Gt的增广图,其中 ψ t \psi_t ψt是机器人当前的位置, G t ′ G_t^{\prime} Gt′与 G t G_t Gt共享边集 E t E_t Et,增广图节点 v i ′ v_i^{\prime} vi′不仅包含 v i = ( x i , y i ) v_i=(x_i,y_i) vi=(xi,yi)的属性,同时还包含了二值的 b i b_i bi属性,表示节点是否已经被智能体访问过,再与效用 u i u_i ui 联系起来, v i ′ = ( x i , y i , u i , b i ) v_i^{\prime}=(x_i,y_i,u_i,b_i) vi′=(xi,yi,ui,bi)。
b i b_i bi的作用:作者通过实验证明,添加二进制访问位可以更好地感知之前的移动过程
u
i
u_i
ui的作用:效用
u
i
u_i
ui代表了节点
v
i
v_i
vi的可观测边界的数量,可观测边界即为在节点到无碰撞边界的连线在传感器范围内的边界,的
u
i
u_i
ui定义为
u
i
=
∣
F
o
,
i
∣
,
∀
f
j
∈
F
o
,
i
,
∥
f
j
−
v
i
∥
≤
d
s
,
L
(
v
i
,
f
j
)
∩
(
P
−
P
f
)
=
∅
\begin{array}{c}u_{i}=\left|F_{o, i}\right|, \forall f_{j} \in F_{o, i},\left\|f_{j}-v_{i}\right\| \leq d_{s}, L\left(v_{i}, f_{j}\right) \cap\left(P-P_{f}\right)=\emptyset\end{array}
ui=∣Fo,i∣,∀fj∈Fo,i,∥fj−vi∥≤ds,L(vi,fj)∩(P−Pf)=∅
F
o
,
i
F_{o,i}
Fo,i表示
v
i
v_i
vi的可观测边界集,
d
s
d_s
ds表示传感器的范围,
L
(
v
i
,
f
j
)
L(v_i,f_j)
L(vi,fj)表示节点
v
i
v_i
vi到边界
f
j
f_j
fj的连线,在输入神经网络之前将节点坐标系和效用归一化
动作:
在每个决策步骤
t
t
t,给定智能体的观测值
o
t
o_t
ot,基于注意力的神经网络输出一个随机策略,从所有邻近节点中选择一个节点作为下一个要访问的视点。其定义为:
π
θ
(
a
t
∣
o
t
)
=
π
θ
(
ψ
t
+
1
=
v
i
,
(
ψ
t
,
v
i
)
∈
E
t
∣
o
t
)
\pi_{\theta}\left(a_{t} \mid o_{t}\right)=\pi_{\theta}\left(\psi_{t+1}=v_{i},\left(\psi_{t}, v_{i}\right) \in E_{t} \mid o_{t}\right)
πθ(at∣ot)=πθ(ψt+1=vi,(ψt,vi)∈Et∣ot)
θ
\theta
θ是神经网络的权重,机器人沿直线移动到下一个视点,并根据沿途收集的数据更新部分地图。
奖励:
r o = ∣ F o , ψ t + 1 ∣ r_{o}=\left|F_{o, \psi_{t+1}}\right| ro=∣Fo,ψt+1∣ ,在新的视点观测到的边界数量
r c = − C ( ψ t , ψ t + 1 ) r_{c}=-\mathrm{C}\left(\psi_{\mathrm{t}}, \psi_{\mathrm{t}+1}\right) rc=−C(ψt,ψt+1),上一个视点和新视点之间的距离惩罚
r f = { 20 , P k = P g 0 , otherwise r_{f}=\left\{\begin{array}{ll}20, & P_{k}=P_{g} \\0, & \text { otherwise }\end{array}\right. rf={20,0,Pk=Pg otherwise ,一个episoid后,探索任务完成得奖励
总奖励 r t ( o t , a t ) = a ⋅ r o + b ⋅ r c + r f r_{t}\left(o_{t}, a_{t}\right)=a \cdot r_{o}+b \cdot r_{c}+r_{f} rt(ot,at)=a⋅ro+b⋅rc+rf, a a a和 b b b是标量参数(参考值 a = 1 / 50 a=1/50 a=1/50, b = 1 / 64 b=1/64 b=1/64)
策略网络
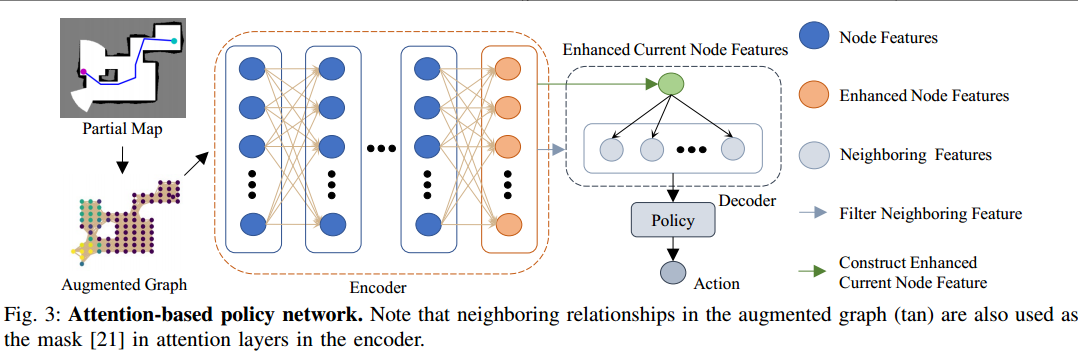
由编码器和解码器构成的基于注意力的神经网络输出策略 ψ θ \psi_\theta ψθ,由编码器从部分地图中提取显著性特征,尤其是增广图中 G ′ G^{\prime} G′节点的之间的依赖关系;由解码器基于这些显著性特征和机器人当前的位置输出在邻近节点上的决定下一个访问点的策略。
Pointer Network的使用
基于策略的RL代理通常具有固定的动作空间,解码器受到指针网络的启发,允许动作空间取决于网络中输入的邻近节点的数量。这允许网络自然地适应无碰撞图,其中节点具有任意数量的邻居。
Attention Layer
使用注意力模块作为基础的构建模块,注意力层的输入包括一个查询向量 h q h^q hq和键值向量 h k , v h^{k,v} hk,v,注意力层的输出是 h i ′ h_i^{\prime} hi′,它是值向量的加权和,权重系数取决于键和值之间的相似度
Encoder
边集的掩膜 M M M的元素由 m i j = { 0 , ( v i , v j ) ∈ E t 1 , ( v i , v j ) ∉ E t m_{i j}=\begin{array}{l}\left\{\begin{array}{l}0,\left(v_{i}, v_{j}\right) \in E_{t} \\1,\left(v_{i}, v_{j}\right) \notin E_{t}\end{array}\right.\\\end{array} mij={0,(vi,vj)∈Et1,(vi,vj)∈/Et计算,节点的特征然后被传递多层注意力层(实际中取6层,其中) h q = h k , v = h n h^q=h^{k,v}=h^n hq=hk,v=hn,每一层的输入是上一层的输出,通过设置 w i j = 0 , ∀ ( i , j ) , m i j = 1 w_{ij}=0,\forall(i,j),m_{ij}=1 wij=0,∀(i,j),mij=1边集掩膜用于准许每个节点访问相邻节点的特征,尽管每一层的注意力被限制在相邻节点上,但通过这种堆叠的注意力结构,节点仍然可以通过多次聚集节点特征来获得非相邻节点的特征。我们的经验发现,这种结构比图transformer更适合在具有杂乱障碍物的地图中学习寻路。我们将编码器的输出称为增强的节点特征 h ^ e \hat{h}^e h^e,因为每个更新的节点特征 h ^ i n \hat{h}_i^n h^in都包含与 v i ′ v_i^{\prime} vi′其他节点的依赖关系。
Decoder
解码器用于输出基于增强节点特征 h ^ e \hat{h}^e h^e和当前机器人的位置 ψ t \psi_t ψt。
当前机器人的位置表示为节点 v c = ψ t v_c=\psi_t vc=ψt,首先选择当前节点特征 h c h^c hc和邻点特征 h n b h^{nb} hnb,其中 ∀ h ^ i n b , ( v c , v i ) ∈ E t \forall \hat{h}_{i}^{n b},\left(v_{c}, v_{i}\right) \in E_{t} ∀h^inb,(vc,vi)∈Et相应地是增强节点特征,将当前节点特征和增强节点特征传入注意力层 h q = h k , v = h n h^q=h^{k,v}=h^n hq=hk,v=hn,将其输出和 h c h^c hcconcatenate并将其投影为d维向量,将这个向量命名为增强的当前节点向量 h ^ c \hat{h}^c h^c,在那之后,将增强的当前节点特征和邻节点特征传入pointer层,注意力层直接输出注意力权重 w w w和 h q = h ^ c , h k , v = h n b h^q=\hat{h}^c,h^{k,v}=h^{nb} hq=h^c,hk,v=hnb作为输出。最终将pointer层的输出作为机器人的策略(即 π θ ( a t ∣ o t ) = w i \pi_\theta(a_t|o_t)=w_i πθ(at∣ot)=wi)
策略网络训练方式
soft actor critic(SAC)
评判网络
训练目的:预测状态-行动的价值
状态-动作价值:由于状态-动作价值的值是对长期回报的近似,所以其有隐性的对于潜在收益的预测(即可能发现潜在的区域),这个性质可以帮助机器人的序列做非近视决策。实际上训练一个评判网络近似软更新状态-动作价值 Q ϕ ( o t , a t ) Q_{\phi}\left(o_{t}, a_{t}\right) Qϕ(ot,at), ϕ \phi ϕ表示评判网络的权重集。
网络结构:评判网络的网络结构与策略网络近乎相同,除了在最后没有pointer层。最后是直接将增强当前节点特征与邻近特征concatenate,并将其投影成状态-动作值
训练
Soft Actor-critic
SAC的目标是学习一种策略,使回报最大化,同时使其熵尽可能高:
π
∗
=
argmax
E
(
o
t
,
a
t
)
[
∑
t
=
0
T
γ
t
(
r
t
+
α
H
(
π
(
.
∣
o
t
)
)
)
]
\pi^{*}=\operatorname{argmax} \mathbb{E}_{\left(o_{t}, a_{t}\right)}\left[\sum_{t=0}^{T} \gamma^{t}\left(r_{t}+\alpha \mathcal{H}\left(\pi\left(. \mid o_{t}\right)\right)\right)\right]
π∗=argmaxE(ot,at)[t=0∑Tγt(rt+αH(π(.∣ot)))]
π
∗
\pi^{*}
π∗是优化策略,
T
T
T是决策的步数,
γ
\gamma
γ是折扣系数,
α
\alpha
α是调节交叉熵对于回报的重要性参数。
软状态价值
V
(
o
t
)
=
E
a
t
[
Q
(
o
t
,
a
t
)
]
−
α
log
(
π
(
a
t
∣
o
t
)
)
V(o_t)=\mathbb{E}_{a_{t}}\left[Q\left(o_{t}, a_{t}\right)\right]-\alpha \log \left(\pi\left(a_{t} \mid o_{t}\right)\right)
V(ot)=Eat[Q(ot,at)]−αlog(π(at∣ot))
critic损失函数
J
Q
(
ϕ
)
=
E
o
t
[
1
2
(
Q
ϕ
(
o
t
,
a
t
)
−
(
r
t
+
γ
E
o
t
+
1
[
V
(
o
t
+
1
)
]
)
)
2
]
J_{Q}(\phi)=\mathbb{E}_{o_{t}}\left[\frac{1}{2} \left(Q_{\phi}\left(o_{t}, a_{t}\right)-\right.\right.\left.\left.\left(r_{t}+\gamma \mathbb{E}_{o_{t+1}}\left[V\left(o_{t+1}\right)\right]\right)\right)^{2}\right]
JQ(ϕ)=Eot[21(Qϕ(ot,at)−(rt+γEot+1[V(ot+1)]))2]
policy损失函数
J
π
(
θ
)
=
E
(
o
t
,
a
t
)
[
α
log
(
π
θ
(
a
t
∣
o
t
)
)
−
Q
ϕ
(
o
t
,
a
t
)
]
J_{\pi}(\theta)=\mathbb{E}_{\left(o_{t}, a_{t}\right)}\left[\alpha \log \left(\pi_{\theta}\left(a_{t} \mid o_{t}\right)\right)-Q_{\phi}\left(o_{t}, a_{t}\right)\right]
Jπ(θ)=E(ot,at)[αlog(πθ(at∣ot))−Qϕ(ot,at)]
训练中自调节的
α
\alpha
α损失
J
(
α
)
=
E
a
t
[
−
α
(
log
π
t
(
a
t
∣
o
t
)
+
H
‾
)
]
J(\alpha)=\mathbb{E}_{a_{t}}\left[-\alpha\left(\log \pi_{t}\left(a_{t} \mid o_{t}\right)+\overline{\mathcal{H}}\right)\right]
J(α)=Eat[−α(logπt(at∣ot)+H)]
H
\mathcal{H}
H表示目标熵。在实际中使用双目标critic网络进行训练
训练细节
基础工作
利用引用中提供的相同环境进行训练,这些环境由随机地下城生成器生成。每个环境是一个640 × 480网格地图,而传感器范围 d s = 80 d_s=80 ds=80
F. Chen, S. Bai, T. Shan, and B. Englot, “Self-learning exploration
and mapping for mobile robots via deep reinforcement learning,” in
Aiaa scitech 2019 forum, 2019, p. 0396.
无碰撞图构建过程
为了构建无碰撞图,均匀分布900个点以覆盖整个环境,将已知自由区域内的所有点视为候选视点 V V V。我们检查每个视点的k = 20最近的邻居,如果这样一条边是无碰撞的,将它们连接起来,形成边缘集 E E E。
任务完成判断标准
我们认为一旦探测到99%以上的groud-truth(|Pk|/|Pg| > 0.99),勘探任务就完成了。
参数
在训练期间,将最大集长度设置为128个决策步骤,折扣因子设置为γ = 1,批大小设置为256,episoid buffer大小设置为10,000。
训练在episoid buffer收集到超过2000步的数据后开始。目标熵设为
0.01
⋅
l
o
g
(
k
)
0.01·log(k)
0.01⋅log(k)。每个训练步骤包含1次迭代,并在1 个episoid完成后进行。对于策略网络和批评网络,我们使用学习率为
1
0
−
5
10^{−5}
10−5的Adam优化器。目标critic网络每256个训练步骤更新一次。
训练时间
模型在配备i9-10980XE CPU和NVIDIA GeForce RTX 3090 GPU的工作站上进行训练。我们使用Ray(一种用于机器学习的分布式框架)来训练我们的模型,以并行化和加速数据收集(实践中有32个实例)。训练需要24小时左右才能完成。
代码参考https://github.com/marmotlab/ARiADNE