首先通过论文中所给的图片了解网络的整体架构:

vit_seg_modeling部分
模块引入和定义相关量:
# coding=utf-8
# __future__ 在老版本的Python代码中兼顾新特性的一种方法
from __future__ import absolute_import
from __future__ import division
from __future__ import print_function
import copy
import logging
import math
from os.path import join as pjoin
import torch
import torch.nn as nn
import numpy as np
from torch.nn import CrossEntropyLoss, Dropout, Softmax, Linear, Conv2d, LayerNorm
from torch.nn.modules.utils import _pair
from scipy import ndimage
from . import vit_seg_configs as configs
from .vit_seg_modeling_resnet_skip import ResNetV2
logger = logging.getLogger(__name__)
ATTENTION_Q = "MultiHeadDotProductAttention_1/query"
ATTENTION_K = "MultiHeadDotProductAttention_1/key"
ATTENTION_V = "MultiHeadDotProductAttention_1/value"
ATTENTION_OUT = "MultiHeadDotProductAttention_1/out"
FC_0 = "MlpBlock_3/Dense_0"
FC_1 = "MlpBlock_3/Dense_1"
ATTENTION_NORM = "LayerNorm_0"
MLP_NORM = "LayerNorm_2"
# 获取超参
CONFIGS = {
'ViT-B_16': configs.get_b16_config(),
'ViT-B_32': configs.get_b32_config(),
'ViT-L_16': configs.get_l16_config(),
'ViT-L_32': configs.get_l32_config(),
'ViT-H_14': configs.get_h14_config(),
'R50-ViT-B_16': configs.get_r50_b16_config(),
'R50-ViT-L_16': configs.get_r50_l16_config(),
'testing': configs.get_testing(),
}
工具函数的定义:
np2th用于将numpy格式的数据改为tensor。
def np2th(weights, conv=False):
"""Possibly convert HWIO to OIHW."""
if conv:
weights = weights.transpose([3, 2, 0, 1])
return torch.from_numpy(weights)
swish时由谷歌团队提出来的激活函数,他们实验表明,在一些具有挑战性的数据集上,它的效果比relu更好。
def swish(x):
return x * torch.sigmoid(x)
ACT2FN = {"gelu": torch.nn.functional.gelu, "relu": torch.nn.functional.relu, "swish": swish}
采用自顶向下的结构来理解代码
VisionTransformer就是模型的整个结构,其中调用了Transformer,DecoderCup,SegmentationHead,load_from用于加载训练好的参数。
class VisionTransformer(nn.Module):
def __init__(self, config, img_size=224, num_classes=21843, zero_head=False, vis=False):
super(VisionTransformer, self).__init__()
self.num_classes = num_classes
self.zero_head = zero_head
self.classifier = config.classifier
self.transformer = Transformer(config, img_size, vis)
self.decoder = DecoderCup(config)
self.segmentation_head = SegmentationHead(
in_channels=config['decoder_channels'][-1],
out_channels=config['n_classes'],
kernel_size=3,
)
self.config = config
def forward(self, x):
if x.size()[1] == 1:
x = x.repeat(1, 3, 1, 1)
x, attn_weights, features = self.transformer(x) # (B, n_patch, hidden)
x = self.decoder(x, features)
logits = self.segmentation_head(x)
return logits
def load_from(self, weights):
# with torch.no_grad()将所有require_grad临时设置为False,这样可以只更新变量的值
with torch.no_grad():
res_weight = weights
self.transformer.embeddings.patch_embeddings.weight.copy_(np2th(weights["embedding/kernel"], conv=True))
self.transformer.embeddings.patch_embeddings.bias.copy_(np2th(weights["embedding/bias"]))
self.transformer.encoder.encoder_norm.weight.copy_(np2th(weights["Transformer/encoder_norm/scale"]))
self.transformer.encoder.encoder_norm.bias.copy_(np2th(weights["Transformer/encoder_norm/bias"]))
posemb = np2th(weights["Transformer/posembed_input/pos_embedding"])
posemb_new = self.transformer.embeddings.position_embeddings
if posemb.size() == posemb_new.size():
self.transformer.embeddings.position_embeddings.copy_(posemb)
elif posemb.size()[1] - 1 == posemb_new.size()[1]:
posemb = posemb[:, 1:]
self.transformer.embeddings.position_embeddings.copy_(posemb)
else:
logger.info("load_pretrained: resized variant: %s to %s" % (posemb.size(), posemb_new.size()))
ntok_new = posemb_new.size(1)
if self.classifier == "seg":
_, posemb_grid = posemb[:, :1], posemb[0, 1:]
gs_old = int(np.sqrt(len(posemb_grid)))
gs_new = int(np.sqrt(ntok_new))
print('load_pretrained: grid-size from %s to %s' % (gs_old, gs_new))
posemb_grid = posemb_grid.reshape(gs_old, gs_old, -1)
zoom = (gs_new / gs_old, gs_new / gs_old, 1)
posemb_grid = ndimage.zoom(posemb_grid, zoom, order=1) # th2np
posemb_grid = posemb_grid.reshape(1, gs_new * gs_new, -1)
posemb = posemb_grid
self.transformer.embeddings.position_embeddings.copy_(np2th(posemb))
# Encoder whole
for bname, block in self.transformer.encoder.named_children():
for uname, unit in block.named_children():
unit.load_from(weights, n_block=uname)
if self.transformer.embeddings.hybrid:
self.transformer.embeddings.hybrid_model.root.conv.weight.copy_(
np2th(res_weight["conv_root/kernel"], conv=True))
# .view(-1)将tensor展开为一维张量,但不改变该对象本身的形状
gn_weight = np2th(res_weight["gn_root/scale"]).view(-1)
gn_bias = np2th(res_weight["gn_root/bias"]).view(-1)
self.transformer.embeddings.hybrid_model.root.gn.weight.copy_(gn_weight)
self.transformer.embeddings.hybrid_model.root.gn.bias.copy_(gn_bias)
for bname, block in self.transformer.embeddings.hybrid_model.body.named_children():
for uname, unit in block.named_children():
unit.load_from(res_weight, n_block=bname, n_unit=uname)
接下来是Transformer的代码:
Transformer包括了Embeddings和Encoder:
class Transformer(nn.Module):
def __init__(self, config, img_size, vis):
super(Transformer, self).__init__()
self.embeddings = Embeddings(config, img_size=img_size)
self.encoder = Encoder(config, vis)
def forward(self, input_ids):
embedding_output, features = self.embeddings(input_ids)
encoded, attn_weights = self.encoder(embedding_output) # (B, n_patch, hidden)
return encoded, attn_weights, features
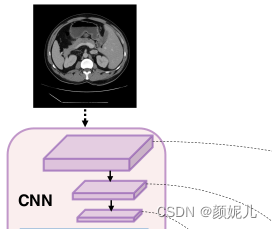
Embeddings的功能对应于图片中的:
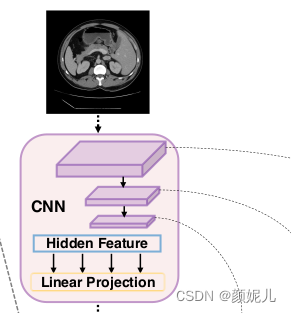
ResNetV2(这部分的代码放在最后一个部分)对图片通过卷积操作提取特征,然后将提取到的各层特征返回到Embeddings。
拿到ResNetV2返回的特征后,将最后一层的特征分割为多个切片,并将各个切片映射成长度为patch_size*patch_size*channels的向量,并且加上位置序列信息,对应于图片的这个部分:
class Embeddings(nn.Module):
"""Construct the embeddings from patch, position embeddings.
"""
def __init__(self, config, img_size, in_channels=3):
super(Embeddings, self).__init__()
self.hybrid = None
self.config = config
# 应该是把参数中的img_size,转换为元组形式即:img_size = (value,value)这里的value即为参数的img_size。
img_size = _pair(img_size)
if config.patches.get("grid") is not None: # ResNet
grid_size = config.patches["grid"] # grid 是一个元组,值为:输入图片大小//切片大小
patch_size = (img_size[0] // 16 // grid_size[0], img_size[1] // 16 // grid_size[1])
patch_size_real = (patch_size[0] * 16, patch_size[1] * 16)
n_patches = (img_size[0] // patch_size_real[0]) * (img_size[1] // patch_size_real[1])
self.hybrid = True
else:
patch_size = _pair(config.patches["size"])
n_patches = (img_size[0] // patch_size[0]) * (img_size[1] // patch_size[1])
self.hybrid = False
if self.hybrid:
self.hybrid_model = ResNetV2(block_units=config.resnet.num_layers, width_factor=config.resnet.width_factor)
in_channels = self.hybrid_model.width * 16
# patch_embeddings通过卷积操作将输入转变为(B, hidden_size, n_patches^(1/2), n_patches^(1/2))
# hidden_size是一个token(相当于输入的一个词)的长度
self.patch_embeddings = Conv2d(in_channels=in_channels,
out_channels=config.hidden_size,
kernel_size=patch_size,
stride=patch_size)
# 各个向量的位置序列
self.position_embeddings = nn.Parameter(torch.zeros(1, n_patches, config.hidden_size))
self.dropout = Dropout(config.transformer["dropout_rate"])
def forward(self, x):
if self.hybrid:
x, features = self.hybrid_model(x)
else:
features = None
x = self.patch_embeddings(x) # (B, hidden, n_patches^(1/2), n_patches^(1/2))
x = x.flatten(2) # 表示从2维开始压缩,得到(B, hidden, n_patches)
x = x.transpose(-1, -2) # 对最后两个维度进行转置(B, n_patches, hidden)
embeddings = x + self.position_embeddings # 加上位置序列
embeddings = self.dropout(embeddings)
return embeddings, features
Encoder是图像的编码部分,根据num_layers生成多个Block模块
class Encoder(nn.Module):
def __init__(self, config, vis):
super(Encoder, self).__init__()
self.vis = vis
# nn.ModuleList()一个module列表,与普通的list相比,它继承了nn.Module的网络模型class,因此可以识别其中的parameters,
# 即该列表中记录的module可以被主module识别,但它只是一个list,不会自动实现forward方法。
self.layer = nn.ModuleList()
self.encoder_norm = LayerNorm(config.hidden_size, eps=1e-6)
for _ in range(config.transformer["num_layers"]):
layer = Block(config, vis)
self.layer.append(copy.deepcopy(layer))
def forward(self, hidden_states):
attn_weights = []
for layer_block in self.layer:
hidden_states, weights = layer_block(hidden_states)
if self.vis:
attn_weights.append(weights)
encoded = self.encoder_norm(hidden_states)
return encoded, attn_weights
Block包括了MSA(Multihead Self-Attention)和MSA(Multi-Layer Perceptron)两个结构,对应于图像中的:
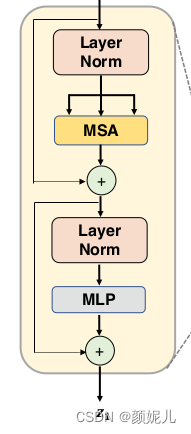
class Block(nn.Module):
def __init__(self, config, vis):
super(Block, self).__init__()
self.hidden_size = config.hidden_size
self.attention_norm = LayerNorm(config.hidden_size, eps=1e-6)
self.ffn_norm = LayerNorm(config.hidden_size, eps=1e-6)
self.ffn = Mlp(config)
self.attn = Attention(config, vis)
def forward(self, x):
h = x
x = self.attention_norm(x)
x, weights = self.attn(x)
x = x + h
h = x
x = self.ffn_norm(x)
x = self.ffn(x)
x = x + h
return x, weights
def load_from(self, weights, n_block):
ROOT = f"Transformer/encoderblock_{n_block}"
with torch.no_grad():
query_weight = np2th(weights[pjoin(ROOT, ATTENTION_Q, "kernel")]).view(self.hidden_size,
self.hidden_size).t()
key_weight = np2th(weights[pjoin(ROOT, ATTENTION_K, "kernel")]).view(self.hidden_size, self.hidden_size).t()
value_weight = np2th(weights[pjoin(ROOT, ATTENTION_V, "kernel")]).view(self.hidden_size,
self.hidden_size).t()
out_weight = np2th(weights[pjoin(ROOT, ATTENTION_OUT, "kernel")]).view(self.hidden_size,
self.hidden_size).t()
query_bias = np2th(weights[pjoin(ROOT, ATTENTION_Q, "bias")]).view(-1)
key_bias = np2th(weights[pjoin(ROOT, ATTENTION_K, "bias")]).view(-1)
value_bias = np2th(weights[pjoin(ROOT, ATTENTION_V, "bias")]).view(-1)
out_bias = np2th(weights[pjoin(ROOT, ATTENTION_OUT, "bias")]).view(-1)
self.attn.query.weight.copy_(query_weight)
self.attn.key.weight.copy_(key_weight)
self.attn.value.weight.copy_(value_weight)
self.attn.out.weight.copy_(out_weight)
self.attn.query.bias.copy_(query_bias)
self.attn.key.bias.copy_(key_bias)
self.attn.value.bias.copy_(value_bias)
self.attn.out.bias.copy_(out_bias)
mlp_weight_0 = np2th(weights[pjoin(ROOT, FC_0, "kernel")]).t()
mlp_weight_1 = np2th(weights[pjoin(ROOT, FC_1, "kernel")]).t()
mlp_bias_0 = np2th(weights[pjoin(ROOT, FC_0, "bias")]).t()
mlp_bias_1 = np2th(weights[pjoin(ROOT, FC_1, "bias")]).t()
self.ffn.fc1.weight.copy_(mlp_weight_0)
self.ffn.fc2.weight.copy_(mlp_weight_1)
self.ffn.fc1.bias.copy_(mlp_bias_0)
self.ffn.fc2.bias.copy_(mlp_bias_1)
self.attention_norm.weight.copy_(np2th(weights[pjoin(ROOT, ATTENTION_NORM, "scale")]))
self.attention_norm.bias.copy_(np2th(weights[pjoin(ROOT, ATTENTION_NORM, "bias")]))
self.ffn_norm.weight.copy_(np2th(weights[pjoin(ROOT, MLP_NORM, "scale")]))
self.ffn_norm.bias.copy_(np2th(weights[pjoin(ROOT, MLP_NORM, "bias")]))
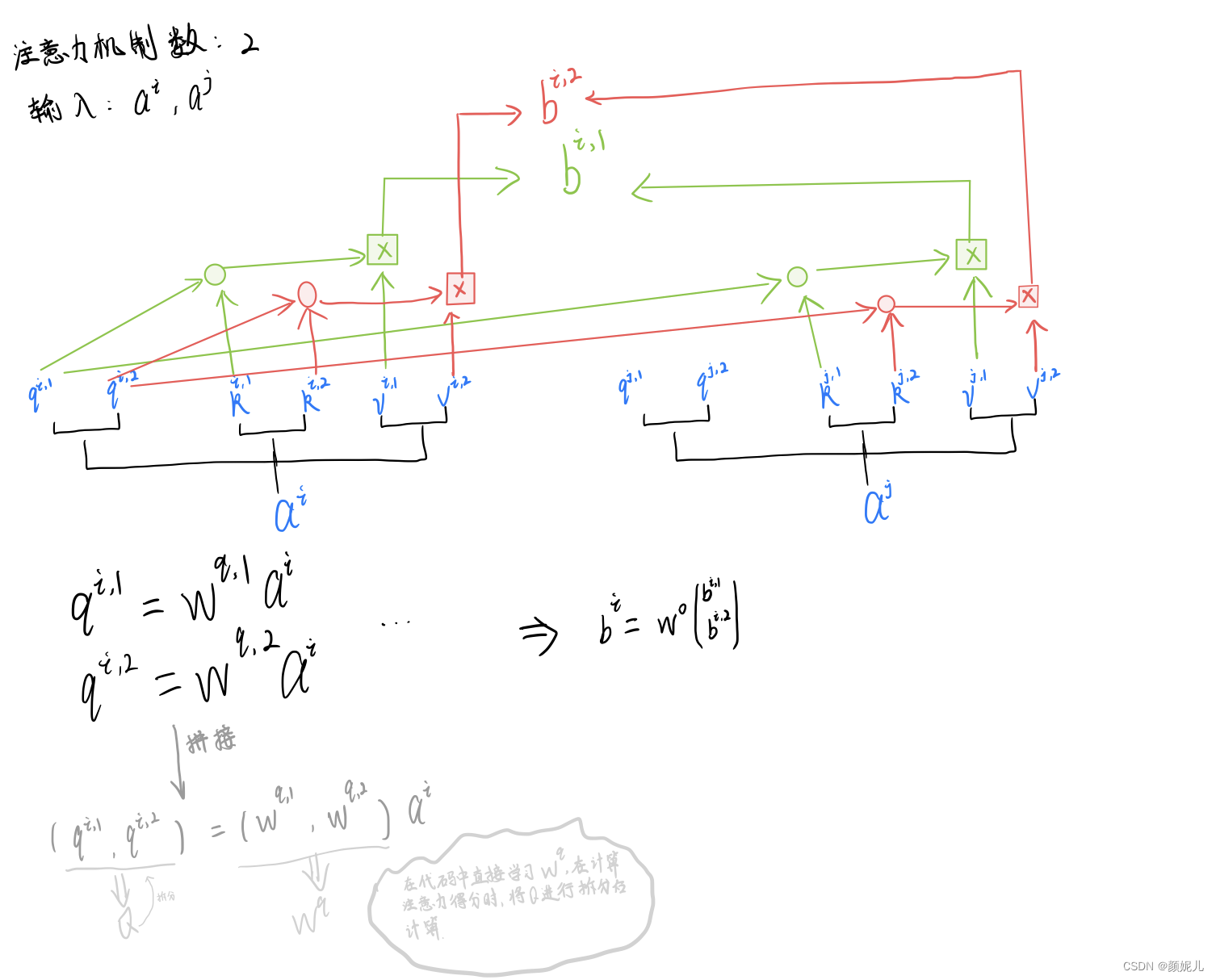
Attention对应图中的MSA部分,num_heads即为多头注意力机制的数量,attention_head_size为每个注意力机制的输出大小。Multihead self-attention 就是采用多个注意力机制来预测,但实现时并不是采用循环来实现多次,由于每个注意力机制采用相同的策略,他们只存在学习到的参数的差异,所以可以直接学习一个大的参数矩阵,我的理解如下图所示:
class Attention(nn.Module):
def __init__(self, config, vis):
super(Attention, self).__init__()
self.vis = vis
self.num_attention_heads = config.transformer["num_heads"]
self.attention_head_size = int(config.hidden_size / self.num_attention_heads)
self.all_head_size = self.num_attention_heads * self.attention_head_size
self.query = Linear(config.hidden_size, self.all_head_size)
self.key = Linear(config.hidden_size, self.all_head_size)
self.value = Linear(config.hidden_size, self.all_head_size)
self.out = Linear(config.hidden_size, config.hidden_size)
self.attn_dropout = Dropout(config.transformer["attention_dropout_rate"])
self.proj_dropout = Dropout(config.transformer["attention_dropout_rate"])
self.softmax = Softmax(dim=-1)
def transpose_for_scores(self, x):
# new_x_shape (B, n_patch, num_attention_heads, attention_head_size)
new_x_shape = x.size()[:-1] + (self.num_attention_heads, self.attention_head_size)
# view()方法主要用于Tensor维度的重构,即返回一个有相同数据但不同维度的Tensor
x = x.view(*new_x_shape)
# permute可以对任意高维矩阵进行转置,transpose只能操作2D矩阵的转置
return x.permute(0, 2, 1, 3) # return (B, num_attention_heads, n_patch, attention_head_size)
def forward(self, hidden_states):
# hidden_states (B, n_patch, hidden)
# mixed_* (B, n_patch, all_head_size)
mixed_query_layer = self.query(hidden_states)
mixed_key_layer = self.key(hidden_states)
mixed_value_layer = self.value(hidden_states)
query_layer = self.transpose_for_scores(mixed_query_layer)
key_layer = self.transpose_for_scores(mixed_key_layer)
value_layer = self.transpose_for_scores(mixed_value_layer)
# torch.matmul矩阵相乘
# key_layer.transpose(-1, -2): (B, num_attention_heads, attention_head_size, n_patch)
# attention_scores: (B, num_attention_heads, n_patch, n_patch)
attention_scores = torch.matmul(query_layer, key_layer.transpose(-1, -2))
attention_scores = attention_scores / math.sqrt(self.attention_head_size)
attention_probs = self.softmax(attention_scores)
weights = attention_probs if self.vis else None
attention_probs = self.attn_dropout(attention_probs)
# context_layer (B, num_attention_heads, n_patch, attention_head_size)
context_layer = torch.matmul(attention_probs, value_layer)
# context_layer (B, n_patch, num_attention_heads, attention_head_size)
# contiguous一般与transpose,permute,view搭配使用:使用transpose或permute进行维度变换后,调用contiguous,然后方可使用view对维度进行变形
context_layer = context_layer.permute(0, 2, 1, 3).contiguous()
# new_context_layer_shape (B, n_patch,all_head_size)
new_context_layer_shape = context_layer.size()[:-2] + (self.all_head_size,)
context_layer = context_layer.view(*new_context_layer_shape)
attention_output = self.out(context_layer)
# attention_output (B, n_patch,hidden_size)
# 小细节 attention_head_size = int(hidden_size / num_attention_heads),all_head_size = num_attention_heads * attention_head_size
# 所以应该满足hidden_size能被num_attention_heads整除
attention_output = self.proj_dropout(attention_output)
return attention_output, weights
Mlp也就是一个前馈神经网络
class Mlp(nn.Module):
"""
Multi-Layer Perceptron: 多层感知器
"""
def __init__(self, config):
super(Mlp, self).__init__()
self.fc1 = Linear(config.hidden_size, config.transformer["mlp_dim"])
self.fc2 = Linear(config.transformer["mlp_dim"], config.hidden_size)
self.act_fn = ACT2FN["gelu"]
self.dropout = Dropout(config.transformer["dropout_rate"])
self._init_weights()
def _init_weights(self):
# nn.init.xavier_uniform_初始化权重,避免深度神经网络训练过程中的梯度消失和梯度爆炸问题
nn.init.xavier_uniform_(self.fc1.weight)
nn.init.xavier_uniform_(self.fc2.weight)
# nn.init.normal_是正态初始化函数
nn.init.normal_(self.fc1.bias, std=1e-6)
nn.init.normal_(self.fc2.bias, std=1e-6)
def forward(self, x):
x = self.fc1(x)
x = self.act_fn(x)
x = self.dropout(x)
x = self.fc2(x)
x = self.dropout(x)
return x
至此,Transformer所调用的模块结束了。
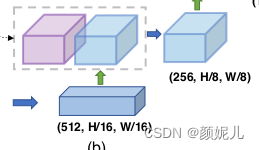
DecoderCup 对对应图片向上解码的部分:
在forward函数中的
B, n_patch, hidden = hidden_states.size() # hidden_states: (B, n_patch, hidden)
h, w = int(np.sqrt(n_patch)), int(np.sqrt(n_patch))
x = hidden_states.permute(0, 2, 1) # x: (B, hidden, n_patch)
x = x.contiguous().view(B, hidden, h, w) # x: (B, hidden, h, w)
x = self.conv_more(x) # (B, hidden, h, w) ===> (B, 512, h', w')
将Transformer的输出(B, n_patch, hidden),先转化为(B, hidden, h, w),其中
h
,
w
=
n
_
p
a
t
c
h
=
H
16
=
W
16
h,w = \sqrt{n\_patch} = \frac{H}{16}= \frac{W}{16}
h,w=n_patch=16H=16W ,即:
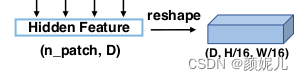
然后通过卷积操作conv_more得到(512, hidden, h, w):

class DecoderCup(nn.Module):
def __init__(self, config):
super().__init__()
self.config = config
head_channels = 512
self.conv_more = Conv2dReLU(
config.hidden_size,
head_channels,
kernel_size=3,
padding=1,
use_batchnorm=True,
)
decoder_channels = config.decoder_channels # decoder_channels (256, 128, 64, 16)
in_channels = [head_channels] + list(decoder_channels[:-1]) # in_channels = [512, 256, 128, 64]
out_channels = decoder_channels
# config.n_skip = 3
if self.config.n_skip != 0:
skip_channels = self.config.skip_channels # config.skip_channels = [512, 256, 64, 16]
for i in range(4 - self.config.n_skip): # re-select the skip channels according to n_skip
skip_channels[3 - i] = 0 # ===》skip_channels = [512, 256, 64, 0]
else:
skip_channels = [0, 0, 0, 0]
# in_channels = [512, 256, 128, 64] out_channels = (256, 128, 64, 16)
blocks = [
DecoderBlock(in_ch, out_ch, sk_ch) for in_ch, out_ch, sk_ch in zip(in_channels, out_channels, skip_channels)
]
self.blocks = nn.ModuleList(blocks)
def forward(self, hidden_states, features=None):
B, n_patch, hidden = hidden_states.size() # hidden_states: (B, n_patch, hidden)
h, w = int(np.sqrt(n_patch)), int(np.sqrt(n_patch))
x = hidden_states.permute(0, 2, 1) # x: (B, hidden, n_patch)
x = x.contiguous().view(B, hidden, h, w) # x: (B, hidden, h, w)
x = self.conv_more(x) # (B, hidden, h, w) ===> (B, 512, h, w)
for i, decoder_block in enumerate(self.blocks):
if features is not None:
skip = features[i] if (i < self.config.n_skip) else None
else:
skip = None
x = decoder_block(x, skip=skip)
return x
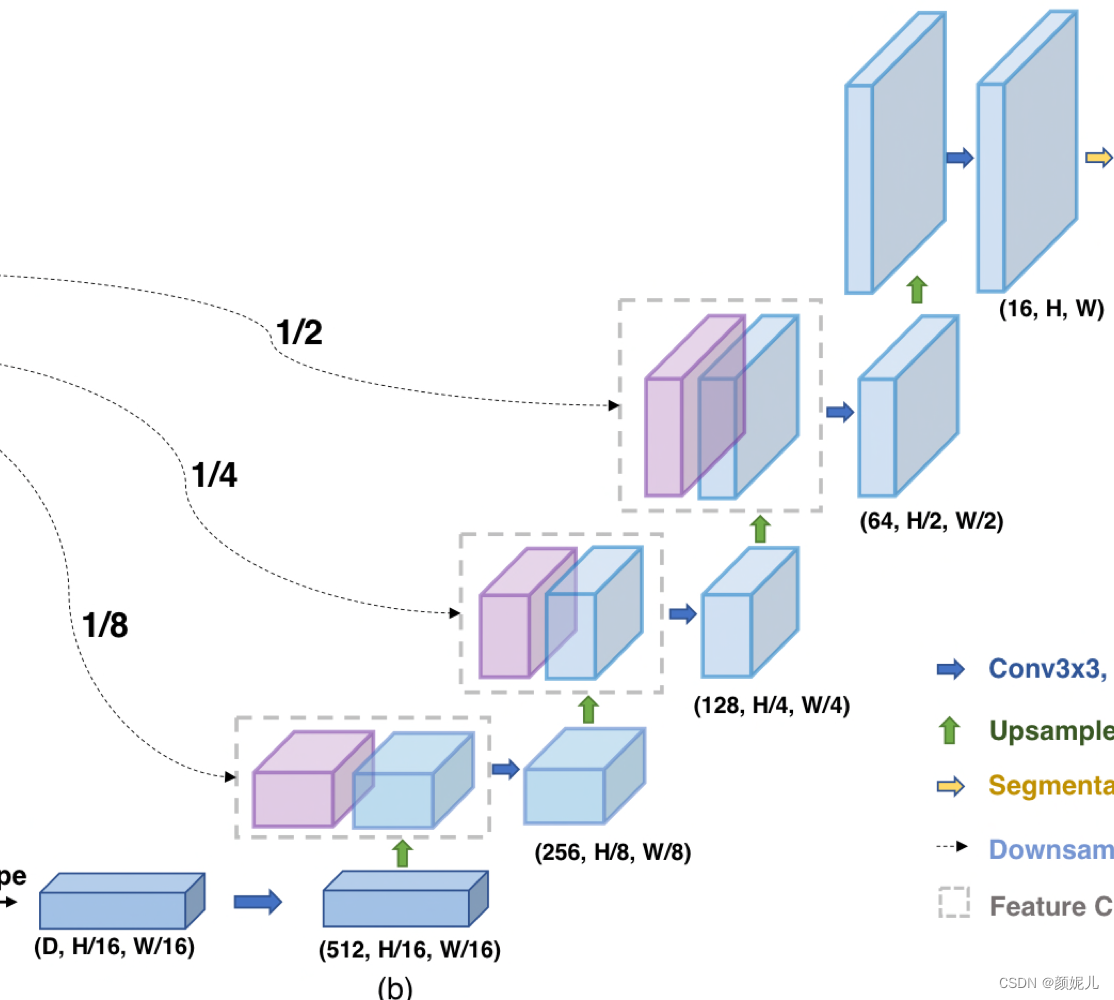
DecoderBlock就是逐层向上解码的过程,首先通过插值上采样UpsamplingBilinear2d扩大H和W,随后与对应的feature进行拼接后进行卷积,即:
class DecoderBlock(nn.Module):
def __init__(
self,
in_channels,
out_channels,
skip_channels=0,
use_batchnorm=True,
):
super().__init__()
self.conv1 = Conv2dReLU(
in_channels + skip_channels,
out_channels,
kernel_size=3,
padding=1,
use_batchnorm=use_batchnorm,
)
self.conv2 = Conv2dReLU(
out_channels,
out_channels,
kernel_size=3,
padding=1,
use_batchnorm=use_batchnorm,
)
self.up = nn.UpsamplingBilinear2d(scale_factor=2)
def forward(self, x, skip=None):
x = self.up(x)
if skip is not None:
x = torch.cat([x, skip], dim=1)
x = self.conv1(x)
x = self.conv2(x)
return x
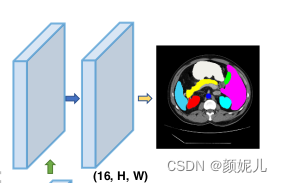
SegmentationHead对应于图像分割部分:
nn.Identity()不对输入进行任何操作,常在分类任务中替换最后一层,得到分类前得到的特征,常用于迁移学习,用法举例:
model = models.resnet18()
# replace last linar layer with nn.Identity
model.fc = nn.Identity()
# get features for input
x = torch.randn(1, 3, 224, 224)
out = model(x)
print(out.shape)
> torch.Size([1, 512])
SegmentationHead模块:
class SegmentationHead(nn.Sequential):
def __init__(self, in_channels, out_channels, kernel_size=3, upsampling=1):
conv2d = nn.Conv2d(in_channels, out_channels, kernel_size=kernel_size, padding=kernel_size // 2)
upsampling = nn.UpsamplingBilinear2d(scale_factor=upsampling) if upsampling > 1 else nn.Identity()
super().__init__(conv2d, upsampling)
最后是ResNetV2模块,该模块在vit_seg_modeling_resnet_skip文件中,对应图片中的:
该模块的相关包及其工具函数:
import math
from os.path import join as pjoin
from collections import OrderedDict
import torch
import torch.nn as nn
import torch.nn.functional as F
def np2th(weights, conv=False):
"""Possibly convert HWIO to OIHW."""
if conv:
weights = weights.transpose([3, 2, 0, 1])
return torch.from_numpy(weights)
class StdConv2d(nn.Conv2d):
def forward(self, x):
w = self.weight
v, m = torch.var_mean(w, dim=[1, 2, 3], keepdim=True, unbiased=False)
w = (w - m) / torch.sqrt(v + 1e-5)
return F.conv2d(x, w, self.bias, self.stride, self.padding,
self.dilation, self.groups)
def conv3x3(cin, cout, stride=1, groups=1, bias=False):
return StdConv2d(cin, cout, kernel_size=3, stride=stride,
padding=1, bias=bias, groups=groups)
def conv1x1(cin, cout, stride=1, bias=False):
return StdConv2d(cin, cout, kernel_size=1, stride=stride,
padding=0, bias=bias)
class ResNetV2(nn.Module):
"""Implementation of Pre-activation (v2) ResNet mode."""
def __init__(self, block_units, width_factor):
super().__init__()
width = int(64 * width_factor)
self.width = width
self.root = nn.Sequential(OrderedDict([
('conv', StdConv2d(3, width, kernel_size=7, stride=2, bias=False, padding=3)),
('gn', nn.GroupNorm(32, width, eps=1e-6)),
('relu', nn.ReLU(inplace=True)),
# ('pool', nn.MaxPool2d(kernel_size=3, stride=2, padding=0))
]))
self.body = nn.Sequential(OrderedDict([
('block1', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width, cout=width*4, cmid=width))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*4, cout=width*4, cmid=width)) for i in range(2, block_units[0] + 1)],
))),
('block2', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width*4, cout=width*8, cmid=width*2, stride=2))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*8, cout=width*8, cmid=width*2)) for i in range(2, block_units[1] + 1)],
))),
('block3', nn.Sequential(OrderedDict(
[('unit1', PreActBottleneck(cin=width*8, cout=width*16, cmid=width*4, stride=2))] +
[(f'unit{i:d}', PreActBottleneck(cin=width*16, cout=width*16, cmid=width*4)) for i in range(2, block_units[2] + 1)],
))),
]))
def forward(self, x):
features = []
b, c, in_size, _ = x.size()
x = self.root(x)
features.append(x)
x = nn.MaxPool2d(kernel_size=3, stride=2, padding=0)(x)
for i in range(len(self.body)-1):
x = self.body[i](x)
right_size = int(in_size / 4 / (i+1))
if x.size()[2] != right_size:
pad = right_size - x.size()[2]
assert pad < 3 and pad > 0, "x {} should {}".format(x.size(), right_size)
feat = torch.zeros((b, x.size()[1], right_size, right_size), device=x.device)
feat[:, :, 0:x.size()[2], 0:x.size()[3]] = x[:]
else:
feat = x
features.append(feat)
x = self.body[-1](x)
return x, features[::-1]
class PreActBottleneck(nn.Module):
"""Pre-activation (v2) bottleneck block.
"""
def __init__(self, cin, cout=None, cmid=None, stride=1):
super().__init__()
cout = cout or cin
cmid = cmid or cout//4
self.gn1 = nn.GroupNorm(32, cmid, eps=1e-6)
self.conv1 = conv1x1(cin, cmid, bias=False)
self.gn2 = nn.GroupNorm(32, cmid, eps=1e-6)
self.conv2 = conv3x3(cmid, cmid, stride, bias=False) # Original code has it on conv1!!
self.gn3 = nn.GroupNorm(32, cout, eps=1e-6)
self.conv3 = conv1x1(cmid, cout, bias=False)
self.relu = nn.ReLU(inplace=True)
if (stride != 1 or cin != cout):
# Projection also with pre-activation according to paper.
self.downsample = conv1x1(cin, cout, stride, bias=False)
self.gn_proj = nn.GroupNorm(cout, cout)
def forward(self, x):
# Residual branch
residual = x
if hasattr(self, 'downsample'):
residual = self.downsample(x)
residual = self.gn_proj(residual)
# Unit's branch
y = self.relu(self.gn1(self.conv1(x)))
y = self.relu(self.gn2(self.conv2(y)))
y = self.gn3(self.conv3(y))
y = self.relu(residual + y)
return y
def load_from(self, weights, n_block, n_unit):
conv1_weight = np2th(weights[pjoin(n_block, n_unit, "conv1/kernel")], conv=True)
conv2_weight = np2th(weights[pjoin(n_block, n_unit, "conv2/kernel")], conv=True)
conv3_weight = np2th(weights[pjoin(n_block, n_unit, "conv3/kernel")], conv=True)
gn1_weight = np2th(weights[pjoin(n_block, n_unit, "gn1/scale")])
gn1_bias = np2th(weights[pjoin(n_block, n_unit, "gn1/bias")])
gn2_weight = np2th(weights[pjoin(n_block, n_unit, "gn2/scale")])
gn2_bias = np2th(weights[pjoin(n_block, n_unit, "gn2/bias")])
gn3_weight = np2th(weights[pjoin(n_block, n_unit, "gn3/scale")])
gn3_bias = np2th(weights[pjoin(n_block, n_unit, "gn3/bias")])
self.conv1.weight.copy_(conv1_weight)
self.conv2.weight.copy_(conv2_weight)
self.conv3.weight.copy_(conv3_weight)
self.gn1.weight.copy_(gn1_weight.view(-1))
self.gn1.bias.copy_(gn1_bias.view(-1))
self.gn2.weight.copy_(gn2_weight.view(-1))
self.gn2.bias.copy_(gn2_bias.view(-1))
self.gn3.weight.copy_(gn3_weight.view(-1))
self.gn3.bias.copy_(gn3_bias.view(-1))
if hasattr(self, 'downsample'):
proj_conv_weight = np2th(weights[pjoin(n_block, n_unit, "conv_proj/kernel")], conv=True)
proj_gn_weight = np2th(weights[pjoin(n_block, n_unit, "gn_proj/scale")])
proj_gn_bias = np2th(weights[pjoin(n_block, n_unit, "gn_proj/bias")])
self.downsample.weight.copy_(proj_conv_weight)
self.gn_proj.weight.copy_(proj_gn_weight.view(-1))
self.gn_proj.bias.copy_(proj_gn_bias.view(-1))
由于只有在hybrid模式下才用到这部分的代码,所以目前并没有去了解为什么采用StdConv2d和GroupNorm,后面再去ViT里面找答案吧。