文章目录
- 28 玻尔兹曼机
- 28.1 模型定义
- 28.2 梯度推导
- 28.3 梯度上升
- 28.4 基于VI[平均场理论]求解后验概率
28 玻尔兹曼机
28.1 模型定义
玻尔兹曼机是一张无向图,其中的隐节点和观测节点可以有任意连接如下图:
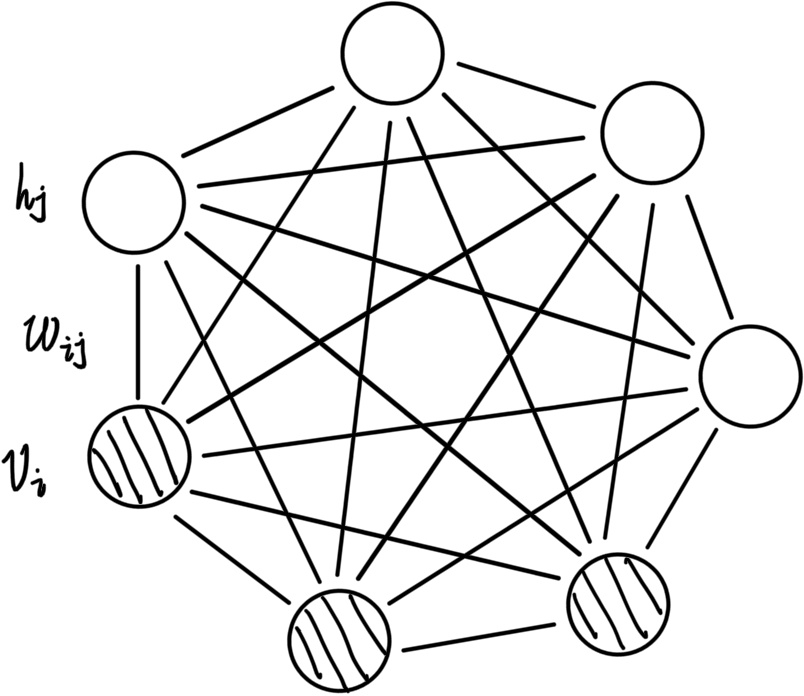
我们给其中的节点、连线做出一些定义:
- 节点:观测节点 V = { 0 , 1 } D V = {\lbrace 0, 1 \rbrace}^D V={0,1}D,隐节点 H = { 0 , 1 } P H = {\lbrace 0, 1 \rbrace}^P H={0,1}P
- 连线:观测节点之间 L = [ L i j ] D × D L = [L_{ij}]_{D \times D} L=[Lij]D×D,隐节点之间 J = [ J i j ] P × P J = [J_{ij}]_{P \times P} J=[Jij]P×P,观测节点与隐节点之间 W = [ W i j ] D × P W = [W_{ij}]_{D \times P} W=[Wij]D×P
- 参数: θ = { W , L , J } \theta = {\lbrace W, L, J \rbrace} θ={W,L,J}
则我们可以根据上面的定义,加上无向图能量方程的性质得到公式:
{
P
(
V
∣
H
)
=
1
z
e
x
p
−
E
(
V
,
H
)
E
(
V
,
H
)
=
−
(
V
T
W
H
+
1
2
V
T
L
V
+
1
2
H
T
J
H
⏟
矩阵对称,参数除
2
)
\begin{cases} P(V|H) = \frac{1}{z} exp{-E(V, H)} \\ E(V, H) = -( {V^T W H} + \underbrace{\frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H}}_{矩阵对称,参数除2} ) \end{cases}
⎩
⎨
⎧P(V∣H)=z1exp−E(V,H)E(V,H)=−(VTWH+矩阵对称,参数除2
21VTLV+21HTJH)
28.2 梯度推导
我们的目标函数就是
P
(
V
)
P(V)
P(V),所以可以讲log-likelihood写作:
1
N
∑
v
∈
V
log
P
(
v
)
\frac{1}{N} \sum_{v \in V} \log P(v)
N1∑v∈VlogP(v),并且
∣
V
∣
=
N
|V| = N
∣V∣=N。所以我们可以将他的梯度写为
1
N
∑
v
∈
V
∇
θ
log
P
(
v
)
\frac{1}{N} \sum_{v \in V} \nabla_\theta \log P(v)
N1∑v∈V∇θlogP(v)。其中
∇
θ
log
P
(
v
)
\nabla_\theta \log P(v)
∇θlogP(v)的推导在24-直面配分函数的RBM-Learning问题中已经推导过了,可以得到:
∇
θ
log
P
(
v
)
=
∑
v
∑
H
P
(
v
,
H
)
⋅
∇
θ
E
(
v
,
H
)
−
∑
H
P
(
H
∣
v
)
⋅
∇
θ
E
(
v
,
H
)
\nabla_\theta \log P(v) = \sum_v \sum_H P(v, H) \cdot \nabla_\theta E(v, H) - \sum_H P(H| v) \cdot \nabla_\theta E(v, H)
∇θlogP(v)=v∑H∑P(v,H)⋅∇θE(v,H)−H∑P(H∣v)⋅∇θE(v,H)
我们对E(v, H)求其中一个参数的导的结果很容易求,所以可以将公式写作:
∇
w
log
P
(
v
)
=
∑
v
∑
H
P
(
v
,
H
)
⋅
(
−
V
H
T
)
−
∑
H
P
(
H
∣
v
)
⋅
(
−
V
H
T
)
=
∑
H
P
(
H
∣
v
)
⋅
V
H
T
−
∑
v
∑
H
P
(
v
,
H
)
⋅
V
H
T
\begin{align} \nabla_w \log P(v) &= \sum_v \sum_H P(v, H) \cdot (- V H^T) - \sum_H P(H| v) \cdot (- V H^T) \\ &= \sum_H P(H| v) \cdot V H^T - \sum_v \sum_H P(v, H) \cdot V H^T \end{align}
∇wlogP(v)=v∑H∑P(v,H)⋅(−VHT)−H∑P(H∣v)⋅(−VHT)=H∑P(H∣v)⋅VHT−v∑H∑P(v,H)⋅VHT
将其带入原式可得:
∇
w
L
=
1
N
∑
v
∈
V
∇
θ
log
P
(
v
)
=
1
N
∑
v
∈
V
∑
H
P
(
H
∣
v
)
⋅
V
H
T
−
1
N
∑
v
∈
V
⏟
1
N
×
N
∑
v
∑
H
P
(
v
,
H
)
⋅
V
H
T
=
1
N
∑
v
∈
V
∑
H
P
(
H
∣
v
)
⋅
V
H
T
−
∑
v
∑
H
P
(
v
,
H
)
⋅
V
H
T
\begin{align} \nabla_w {\mathcal L} &= \frac{1}{N} \sum_{v \in V} \nabla_\theta \log P(v) \\ &= \frac{1}{N} \sum_{v \in V} \sum_H P(H| v) \cdot V H^T - \underbrace{\frac{1}{N} \sum_{v \in V}}_{\frac{1}{N} \times N} \sum_v \sum_H P(v, H) \cdot V H^T \\ &= \frac{1}{N} \sum_{v \in V} \sum_H P(H| v) \cdot V H^T - \sum_v \sum_H P(v, H) \cdot V H^T \\ \end{align}
∇wL=N1v∈V∑∇θlogP(v)=N1v∈V∑H∑P(H∣v)⋅VHT−N1×N
N1v∈V∑v∑H∑P(v,H)⋅VHT=N1v∈V∑H∑P(H∣v)⋅VHT−v∑H∑P(v,H)⋅VHT
我们用
P
d
a
t
a
P_{data}
Pdata表示
P
d
a
t
a
(
v
,
H
)
=
P
d
a
t
a
(
v
)
⋅
P
m
o
d
e
l
(
H
∣
v
)
P_{data}(v, H) = P_{data}(v) \cdot P_{model}(H| v)
Pdata(v,H)=Pdata(v)⋅Pmodel(H∣v),
P
m
o
d
e
l
P_{model}
Pmodel表示
P
m
o
d
e
l
(
v
,
H
)
P_{model}(v, H)
Pmodel(v,H),则可以将公式再转化为:
∇
w
L
=
E
P
d
a
t
a
[
V
H
T
]
−
E
P
m
o
d
e
l
[
V
H
T
]
\begin{align} \nabla_w {\mathcal L} &= E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right] \end{align}
∇wL=EPdata[VHT]−EPmodel[VHT]
28.3 梯度上升
给三个参数分别写出他们的变化量(系数
×
\times
×梯度):
{
Δ
W
=
α
(
E
P
d
a
t
a
[
V
H
T
]
−
E
P
m
o
d
e
l
[
V
H
T
]
)
Δ
L
=
α
(
E
P
d
a
t
a
[
V
V
T
]
−
E
P
m
o
d
e
l
[
V
V
T
]
)
Δ
J
=
α
(
E
P
d
a
t
a
[
H
H
T
]
−
E
P
m
o
d
e
l
[
H
H
T
]
)
\begin{cases} \Delta W = \alpha (E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right]) \\ \Delta L = \alpha (E_{P_{data}} \left[ V V^T \right] - E_{P_{model}} \left[ V V^T \right]) \\ \Delta J = \alpha (E_{P_{data}} \left[ H H^T \right] - E_{P_{model}} \left[ H H^T \right]) \\ \end{cases}
⎩
⎨
⎧ΔW=α(EPdata[VHT]−EPmodel[VHT])ΔL=α(EPdata[VVT]−EPmodel[VVT])ΔJ=α(EPdata[HHT]−EPmodel[HHT])
这是用于表示在一次梯度上升中参数的改变量,由于
W
,
L
,
J
W,L,J
W,L,J是矩阵,将他们拆的更细可以写作:
Δ
w
i
j
=
α
(
E
P
d
a
t
a
[
v
i
h
j
]
⏟
positive phase
−
E
P
m
o
d
e
l
[
v
i
h
j
]
⏟
negative phase
)
\Delta w_{ij} = \alpha ( \underbrace{E_{P_{data}} \left[ v_i h_j \right]}_{\text{positive phase}} - \underbrace{E_{P_{model}} \left[ v_i h_j \right]}_{\text{negative phase}} )
Δwij=α(positive phase
EPdata[vihj]−negative phase
EPmodel[vihj])
但是这两项都很难求,因为要用到
P
m
o
d
e
l
P_{model}
Pmodel,如果要得到
P
m
o
d
e
l
P_{model}
Pmodel则要采用MCMC的方法,但对一个这样的图进行MCMC非常的消耗时间(不过这也给我们提供了一个解题思路)。
具体要用到MCMC的话,我们必须要有每一个维度的后验,所以我们根据复杂的推导(下面证明)可以得到每一个维度的后验——在固定其他维度求这一个维度的情况:
{
P
(
v
i
=
1
∣
H
,
V
−
i
)
=
σ
(
∑
j
=
1
P
w
i
j
h
j
+
∑
k
=
1
,
−
i
D
L
i
k
v
k
)
P
(
h
j
=
1
∣
V
,
H
−
j
)
=
σ
(
∑
i
=
1
P
w
i
j
v
i
+
∑
m
=
1
,
−
i
D
J
j
m
h
m
)
\begin{cases} P(v_i = 1|H, V_{-i}) = \sigma(\sum_{j=1}^P w_{ij} h_j + \sum_{k=1,-i}^D L_{ik} v_k) \\ P(h_j = 1|V, H_{-j}) = \sigma(\sum_{i=1}^P w_{ij} v_i + \sum_{m=1,-i}^D J_{jm} h_m) \\ \end{cases}
{P(vi=1∣H,V−i)=σ(∑j=1Pwijhj+∑k=1,−iDLikvk)P(hj=1∣V,H−j)=σ(∑i=1Pwijvi+∑m=1,−iDJjmhm)
这个公式我们可以发现在RBM情况下也是符合RBM后验公式的。
接下来我们证明一下上面这个公式,下文验证
P
(
v
i
∣
H
,
V
−
i
)
P(v_i|H, V_{-i})
P(vi∣H,V−i)的情况,
P
(
h
j
∣
V
,
H
−
j
)
P(h_j|V, H_{-j})
P(hj∣V,H−j)可以类比。首先对其进行变换:
P
(
v
i
∣
H
,
V
−
i
)
=
P
(
H
,
V
)
P
(
H
,
V
−
i
)
=
1
Z
exp
{
−
E
[
V
,
H
]
}
∑
v
i
1
Z
exp
{
−
E
[
V
,
H
]
}
=
1
Z
exp
{
V
T
W
H
+
1
2
V
T
L
V
+
1
2
H
T
J
H
}
∑
v
i
1
Z
exp
{
V
T
W
H
+
1
2
V
T
L
V
+
1
2
H
T
J
H
}
=
1
Z
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
⋅
exp
{
1
2
H
T
J
H
}
1
Z
exp
{
1
2
H
T
J
H
}
⋅
∑
v
i
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
=
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
∑
v
i
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
=
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
∣
v
i
=
1
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
∣
v
i
=
0
+
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
∣
v
i
=
1
\begin{align} P(v_i|H, V_{-i}) &= \frac{P(H, V)}{P(H, V_{-i})} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace - E[V, H] \rbrace} }{ \sum_{v_i} \frac{1}{Z} \exp{\lbrace - E[V, H] \rbrace}} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \rbrace} }{ \sum_{v_i} \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \rbrace}} \\ &= \frac{ \frac{1}{Z} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} \cdot \exp{\lbrace \frac{1}{2} {H^T J H} \rbrace} }{ \frac{1}{Z} \exp{\lbrace \frac{1}{2} {H^T J H} \rbrace} \cdot \sum_{v_i} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}} \\ &= \frac{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} }{ \sum_{v_i} \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}} \\ &= \frac{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 1} }{ \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 0} + \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace}|_{v_i = 1} } \\ \end{align}
P(vi∣H,V−i)=P(H,V−i)P(H,V)=∑viZ1exp{−E[V,H]}Z1exp{−E[V,H]}=∑viZ1exp{VTWH+21VTLV+21HTJH}Z1exp{VTWH+21VTLV+21HTJH}=Z1exp{21HTJH}⋅∑viexp{VTWH+21VTLV}Z1exp{VTWH+21VTLV}⋅exp{21HTJH}=∑viexp{VTWH+21VTLV}exp{VTWH+21VTLV}=exp{VTWH+21VTLV}∣vi=0+exp{VTWH+21VTLV}∣vi=1exp{VTWH+21VTLV}∣vi=1
若我们将相同的部份表示为
Δ
v
i
\Delta_{v_i}
Δvi,则可以将公式写为:
P
(
v
i
∣
H
,
V
−
i
)
=
Δ
v
i
∣
v
i
=
1
Δ
v
i
∣
v
i
=
0
+
Δ
v
i
∣
v
i
=
1
\begin{align} P(v_i|H, V_{-i}) &= \frac{ \Delta_{v_i}|_{v_i = 1} }{ \Delta_{v_i}|_{v_i = 0} + \Delta_{v_i}|_{v_i = 1} } \\ \end{align}
P(vi∣H,V−i)=Δvi∣vi=0+Δvi∣vi=1Δvi∣vi=1
其中
Δ
v
i
\Delta_{v_i}
Δvi可以做如下变换:
Δ
v
i
=
exp
{
V
T
W
H
+
1
2
V
T
L
V
}
=
exp
{
∑
i
^
=
1
D
∑
j
=
1
P
v
i
^
W
i
^
j
h
j
+
1
2
∑
i
^
=
1
D
∑
k
=
1
D
v
i
^
L
i
^
k
v
k
}
\begin{align} \Delta_{v_i} &= \exp{\lbrace {V^T W H} + \frac{1}{2} {V^T L V} \rbrace} \\ &= \exp{\lbrace \sum_{{\hat i} = 1}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1}^{D} \sum_{k = 1}^{D} {v_{\hat i} L_{{\hat i} k} v_k} \rbrace} \end{align}
Δvi=exp{VTWH+21VTLV}=exp{i^=1∑Dj=1∑Pvi^Wi^jhj+21i^=1∑Dk=1∑Dvi^Li^kvk}
我们接下来将有
v
i
v_i
vi的项全部拆分出来:
Δ
v
i
=
exp
{
∑
i
^
=
1
,
−
i
D
∑
j
=
1
P
v
i
^
W
i
^
j
h
j
+
∑
j
=
1
P
v
i
W
i
j
h
j
}
⋅
exp
{
1
2
(
∑
i
^
=
1
,
−
i
D
∑
k
=
1
,
−
i
D
v
i
^
W
i
^
k
h
k
+
v
i
L
i
i
v
i
⏟
0
+
∑
i
^
=
1
,
−
i
D
v
i
^
W
i
^
i
v
i
⏟
相同
+
∑
k
=
1
,
−
i
D
v
i
L
i
k
v
k
)
}
=
exp
{
∑
i
^
=
1
,
−
i
D
∑
j
=
1
P
v
i
^
W
i
^
j
h
j
+
∑
j
=
1
P
v
i
W
i
j
h
j
+
1
2
∑
i
^
=
1
,
−
i
D
∑
k
=
1
,
−
i
D
v
i
^
W
i
^
k
h
k
+
∑
k
=
1
,
−
i
D
v
i
L
i
k
v
k
}
\begin{align} \Delta_{v_i} &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \sum_{j = 1}^{P} {v_i W_{i j} h_j} \rbrace} \\ & \cdot \exp{\lbrace \frac{1}{2} \left( \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} + \underbrace{v_i L_{ii} v_i}_{0} + \underbrace{\sum_{{\hat i} = 1, -i}^{D} {v_{\hat i} W_{{\hat i} i} v_i}}_{相同} + \sum_{k = 1, -i}^{D} {v_i L_{i k} v_k} \right) \rbrace} \\ &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \sum_{j = 1}^{P} {v_i W_{i j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} + \sum_{k = 1, -i}^{D} {v_i L_{i k} v_k} \rbrace} \end{align}
Δvi=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+j=1∑PviWijhj}⋅exp{21
i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk+0
viLiivi+相同
i^=1,−i∑Dvi^Wi^ivi+k=1,−i∑DviLikvk
}=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+j=1∑PviWijhj+21i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk+k=1,−i∑DviLikvk}
所以我们将
v
i
=
1
v_i = 1
vi=1和
v
i
=
0
v_i = 0
vi=0代入该公式即可得出结果。
Δ
v
i
=
0
=
exp
{
∑
i
^
=
1
,
−
i
D
∑
j
=
1
P
v
i
^
W
i
^
j
h
j
+
1
2
∑
i
^
=
1
,
−
i
D
∑
k
=
1
,
−
i
D
v
i
^
W
i
^
k
h
k
}
=
exp
{
A
+
B
}
Δ
v
i
=
1
=
exp
{
A
+
B
+
∑
j
=
1
P
W
i
j
h
j
+
∑
k
=
1
,
−
i
D
L
i
k
v
k
}
\begin{align} \Delta_{v_i = 0} &= \exp{\lbrace \sum_{{\hat i} = 1, -i}^{D} \sum_{j = 1}^{P} {v_{\hat i} W_{{\hat i} j} h_j} + \frac{1}{2} \sum_{{\hat i} = 1, -i}^{D} \sum_{k = 1,-i}^{D} {v_{\hat i} W_{{\hat i} k} h_k} \rbrace} = \exp{\lbrace A + B \rbrace} \\ \Delta_{v_i = 1} &= \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} \end{align}
Δvi=0Δvi=1=exp{i^=1,−i∑Dj=1∑Pvi^Wi^jhj+21i^=1,−i∑Dk=1,−i∑Dvi^Wi^khk}=exp{A+B}=exp{A+B+j=1∑PWijhj+k=1,−i∑DLikvk}
P ( v i ∣ H , V − i ) = Δ v i ∣ v i = 1 Δ v i ∣ v i = 0 + Δ v i ∣ v i = 1 = exp { A + B + ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } exp { A + B } + exp { A + B + ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } = exp { ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } 1 + exp { ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k } = σ ( ∑ j = 1 P W i j h j + ∑ k = 1 , − i D L i k v k ) \begin{align} P(v_i|H, V_{-i}) &= \frac{ \Delta_{v_i}|_{v_i = 1} }{ \Delta_{v_i}|_{v_i = 0} + \Delta_{v_i}|_{v_i = 1} } \\ &= \frac{ \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} }{ \exp{\lbrace A + B \rbrace} + \exp{\lbrace A + B + \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} } \\ &= \frac{ \exp{\lbrace \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} }{ 1 + \exp{\lbrace \sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k} \rbrace} } \\ &= \sigma(\sum_{j = 1}^{P} {W_{i j} h_j} + \sum_{k = 1, -i}^{D} {L_{i k} v_k}) \end{align} P(vi∣H,V−i)=Δvi∣vi=0+Δvi∣vi=1Δvi∣vi=1=exp{A+B}+exp{A+B+∑j=1PWijhj+∑k=1,−iDLikvk}exp{A+B+∑j=1PWijhj+∑k=1,−iDLikvk}=1+exp{∑j=1PWijhj+∑k=1,−iDLikvk}exp{∑j=1PWijhj+∑k=1,−iDLikvk}=σ(j=1∑PWijhj+k=1,−i∑DLikvk)
28.4 基于VI[平均场理论]求解后验概率
我们的参数,通过梯度求出的变化量可以表示为:
{
Δ
W
=
α
(
E
P
d
a
t
a
[
V
H
T
]
−
E
P
m
o
d
e
l
[
V
H
T
]
)
Δ
L
=
α
(
E
P
d
a
t
a
[
V
V
T
]
−
E
P
m
o
d
e
l
[
V
V
T
]
)
Δ
J
=
α
(
E
P
d
a
t
a
[
H
H
T
]
−
E
P
m
o
d
e
l
[
H
H
T
]
)
\begin{cases} \Delta W = \alpha (E_{P_{data}} \left[ V H^T \right] - E_{P_{model}} \left[ V H^T \right]) \\ \Delta L = \alpha (E_{P_{data}} \left[ V V^T \right] - E_{P_{model}} \left[ V V^T \right]) \\ \Delta J = \alpha (E_{P_{data}} \left[ H H^T \right] - E_{P_{model}} \left[ H H^T \right]) \\ \end{cases}
⎩
⎨
⎧ΔW=α(EPdata[VHT]−EPmodel[VHT])ΔL=α(EPdata[VVT]−EPmodel[VVT])ΔJ=α(EPdata[HHT]−EPmodel[HHT])
但是如果要直接求出其后验概率,还应该从
L
=
E
L
B
O
{\mathcal L} = ELBO
L=ELBO开始分析,通过平均场理论(在VI中使用过)进行分解:
L
=
E
L
B
O
=
log
P
θ
(
V
)
−
K
L
(
q
ϕ
∥
p
θ
)
=
∑
h
q
ϕ
(
H
∣
V
)
⋅
log
P
θ
(
V
,
H
)
+
H
[
q
]
\begin{align} {\mathcal L} &= ELBO = \log P_\theta(V) - KL(q_\phi \Vert p_\theta) = \sum_h q_\phi(H|V) \cdot \log P_\theta(V,H) + H[q] \end{align}
L=ELBO=logPθ(V)−KL(qϕ∥pθ)=h∑qϕ(H∣V)⋅logPθ(V,H)+H[q]
我们在这里做出一些假设(将
q
(
H
∣
V
)
q(H|V)
q(H∣V)拆分为P个维度之积):
{
q
ϕ
(
H
∣
V
)
=
∏
j
=
1
P
q
ϕ
(
H
j
∣
V
)
q
ϕ
(
H
j
=
1
∣
V
)
=
ϕ
j
ϕ
=
{
ϕ
j
}
j
=
1
P
\begin{cases} q_\phi(H|V) = \prod_{j=1}^{P} q_\phi(H_j|V) \\ q_\phi(H_j = 1| V) = \phi_j \\ \phi = \{\phi_j\}_{j=1}^P \\ \end{cases}
⎩
⎨
⎧qϕ(H∣V)=∏j=1Pqϕ(Hj∣V)qϕ(Hj=1∣V)=ϕjϕ={ϕj}j=1P
如果我们要求出后验概率就是学习参数
θ
\theta
θ,在之类也等同于学习参数
ϕ
\phi
ϕ,于是我们可以对
a
r
g
max
ϕ
j
L
arg\max_{\phi_j}{\mathcal L}
argmaxϕjL进行求解,我们将其进行化简:
ϕ
j
^
=
a
r
g
max
ϕ
j
L
=
a
r
g
max
ϕ
j
E
L
B
O
=
a
r
g
max
ϕ
j
∑
h
q
ϕ
(
H
∣
V
)
⋅
log
P
θ
(
V
,
H
)
+
H
[
q
]
=
a
r
g
max
ϕ
j
∑
h
q
ϕ
(
H
∣
V
)
⋅
[
−
log
Z
+
V
T
W
H
+
1
2
V
T
L
V
+
1
2
H
T
J
H
]
+
H
[
q
]
=
a
r
g
max
ϕ
j
∑
h
q
ϕ
(
H
∣
V
)
⏟
=
1
⋅
[
−
log
Z
+
1
2
V
T
L
V
]
⏟
与h和
ϕ
j
都无关,为常数C
+
∑
h
q
ϕ
(
H
∣
V
)
⋅
[
V
T
W
H
+
1
2
H
T
J
H
]
+
H
[
q
]
=
a
r
g
max
ϕ
j
∑
h
q
ϕ
(
H
∣
V
)
⋅
[
V
T
W
H
+
1
2
H
T
J
H
]
+
H
[
q
]
=
a
r
g
max
ϕ
j
∑
h
q
ϕ
(
H
∣
V
)
⋅
V
T
W
H
⏟
(
1
)
+
1
2
∑
h
q
ϕ
(
H
∣
V
)
⋅
H
T
J
H
⏟
(
2
)
+
H
[
q
]
⏟
(
3
)
\begin{align} {\hat {\phi_j}} &= arg\max_{\phi_j} {\mathcal L} = arg\max_{\phi_j} ELBO \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \log P_\theta(V,H) + H[q] \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \left[ -\log Z + {V^T W H} + \frac{1}{2} {V^T L V} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \underbrace{\sum_h q_\phi(H|V)}_{=1} \cdot \underbrace{\left[ -\log Z + \frac{1}{2} {V^T L V} \right]}_{\text{与h和$\phi_j$都无关,为常数C}} + \sum_h q_\phi(H|V) \cdot \left[ {V^T W H} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \sum_h q_\phi(H|V) \cdot \left[ {V^T W H} + \frac{1}{2} {H^T J H} \right] + H[q] \\ &= arg\max_{\phi_j} \underbrace{\sum_h q_\phi(H|V) \cdot {V^T W H}}_{(1)} + \underbrace{\frac{1}{2} \sum_h q_\phi(H|V) \cdot {H^T J H}}_{(2)} + \underbrace{H[q]}_{(3)} \\ \end{align}
ϕj^=argϕjmaxL=argϕjmaxELBO=argϕjmaxh∑qϕ(H∣V)⋅logPθ(V,H)+H[q]=argϕjmaxh∑qϕ(H∣V)⋅[−logZ+VTWH+21VTLV+21HTJH]+H[q]=argϕjmax=1
h∑qϕ(H∣V)⋅与h和ϕj都无关,为常数C
[−logZ+21VTLV]+h∑qϕ(H∣V)⋅[VTWH+21HTJH]+H[q]=argϕjmaxh∑qϕ(H∣V)⋅[VTWH+21HTJH]+H[q]=argϕjmax(1)
h∑qϕ(H∣V)⋅VTWH+(2)
21h∑qϕ(H∣V)⋅HTJH+(3)
H[q]
得到如上公式后,我们只需对每个部份进行求导即可得到结果,过程中引入假设(拆分维度)即可更加优化公式,我们以
(
1
)
(1)
(1)为例:
(
1
)
=
∑
h
q
ϕ
(
H
∣
V
)
⋅
V
T
W
H
=
∑
h
∏
j
^
=
1
P
q
ϕ
(
H
j
^
∣
V
)
⋅
∑
i
=
1
D
∑
j
^
=
1
P
v
i
w
i
j
^
h
j
^
\begin{align} (1) &= \sum_h q_\phi(H|V) \cdot {V^T W H} = \sum_h \prod_{{\hat j}=1}^{P} q_\phi(H_{\hat j}|V) \cdot \sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} {v_i w_{i{\hat j}} h_{\hat j}} \end{align}
(1)=h∑qϕ(H∣V)⋅VTWH=h∑j^=1∏Pqϕ(Hj^∣V)⋅i=1∑Dj^=1∑Pviwij^hj^
我们取出其中的一项,如
i
=
1
,
j
^
=
2
i = 1, {\hat j} = 2
i=1,j^=2,可以得到:
∑
h
∏
j
^
=
1
P
q
ϕ
(
H
j
^
∣
V
)
⋅
v
1
w
12
h
2
=
∑
h
2
q
ϕ
(
H
2
∣
V
)
⋅
v
1
w
12
h
2
⏟
提出
h
2
相关项
⋅
∑
h
,
−
h
2
∏
j
^
=
1
,
−
2
P
q
ϕ
(
H
j
^
∣
V
)
⏟
=
1
=
∑
h
2
q
ϕ
(
H
2
∣
V
)
⋅
v
1
w
12
h
2
=
q
ϕ
(
H
2
=
1
∣
V
)
⋅
v
1
w
12
⋅
1
+
q
ϕ
(
H
2
=
0
∣
V
)
⋅
v
1
w
12
⋅
0
=
ϕ
2
v
1
w
12
\begin{align} \sum_h \prod_{{\hat j}=1}^{P} q_\phi(H_{\hat j}|V) \cdot {v_1 w_{12} h_{2}} &= \underbrace{\sum_{h_2} q_\phi(H_2|V) \cdot {v_1 w_{12} h_{2}}}_{\text{提出$h_2$相关项}} \cdot \underbrace{\sum_{h, -h_2} \prod_{{\hat j}=1, -2}^{P} q_\phi(H_{\hat j}|V)}_{=1} \\ &= \sum_{h_2} q_\phi(H_2|V) \cdot {v_1 w_{12} h_{2}} \\ &= q_\phi(H_2 = 1|V) \cdot {v_1 w_{12} \cdot 1} + q_\phi(H_2 = 0|V) \cdot {v_1 w_{12} \cdot 0} \\ &= \phi_2 {v_1 w_{12}} \end{align}
h∑j^=1∏Pqϕ(Hj^∣V)⋅v1w12h2=提出h2相关项
h2∑qϕ(H2∣V)⋅v1w12h2⋅=1
h,−h2∑j^=1,−2∏Pqϕ(Hj^∣V)=h2∑qϕ(H2∣V)⋅v1w12h2=qϕ(H2=1∣V)⋅v1w12⋅1+qϕ(H2=0∣V)⋅v1w12⋅0=ϕ2v1w12
所以
(
1
)
(1)
(1)的求和结果就应该是
∑
i
=
1
D
∑
j
^
=
1
P
ϕ
j
^
v
i
w
i
j
^
\sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} \phi_{\hat j} v_i w_{i{\hat j}}
∑i=1D∑j^=1Pϕj^viwij^,同理可得
(
2
)
,
(
3
)
(2), (3)
(2),(3)结果为:
{
(
1
)
=
∑
i
=
1
D
∑
j
^
=
1
P
ϕ
j
^
v
i
w
i
j
^
(
2
)
=
∑
j
^
=
1
P
∑
m
=
1
,
−
j
P
ϕ
j
^
ϕ
m
J
j
^
m
+
C
(
3
)
=
−
∑
j
=
1
P
[
ϕ
j
log
ϕ
j
+
(
1
−
ϕ
j
)
log
(
1
−
ϕ
j
)
]
\begin{cases} (1) = \sum_{i=1}^{D} \sum_{{\hat j}=1}^{P} \phi_{\hat j} v_i w_{i{\hat j}} \\ (2) = \sum_{{\hat j}=1}^{P} \sum_{m=1, -j}^{P} \phi_{\hat j} \phi_m J_{{\hat j}m} + C \\ (3) = - \sum_{j=1}^P \left[ \phi_j \log \phi_j + (1-\phi_j) \log (1-\phi_j) \right] \\ \end{cases}
⎩
⎨
⎧(1)=∑i=1D∑j^=1Pϕj^viwij^(2)=∑j^=1P∑m=1,−jPϕj^ϕmJj^m+C(3)=−∑j=1P[ϕjlogϕj+(1−ϕj)log(1−ϕj)]
通过求导又可得:
{
∇
ϕ
j
(
1
)
=
∑
i
=
1
D
v
i
w
i
j
∇
ϕ
j
(
2
)
=
∑
m
=
1
,
−
j
P
ϕ
m
J
j
m
∇
ϕ
j
(
3
)
=
−
log
ϕ
j
1
−
ϕ
j
\begin{cases} \nabla_{\phi_j} (1) = \sum_{i=1}^{D} v_i w_{ij} \\ \nabla_{\phi_j} (2) = \sum_{m=1, -j}^{P} \phi_m J_{jm} \\ \nabla_{\phi_j} (3) = - \log \frac{\phi_j}{1 - \phi_j} \\ \end{cases}
⎩
⎨
⎧∇ϕj(1)=∑i=1Dviwij∇ϕj(2)=∑m=1,−jPϕmJjm∇ϕj(3)=−log1−ϕjϕj
根据
∇
ϕ
j
(
1
)
+
∇
ϕ
j
(
2
)
+
∇
ϕ
j
(
3
)
=
0
\nabla_{\phi_j} (1) + \nabla_{\phi_j} (2) + \nabla_{\phi_j} (3) = 0
∇ϕj(1)+∇ϕj(2)+∇ϕj(3)=0可得:
ϕ
j
=
σ
(
∑
i
=
1
D
v
i
w
i
j
+
∑
m
=
1
,
−
j
P
ϕ
m
J
j
m
)
\phi_j = \sigma(\sum_{i=1}^{D} v_i w_{ij} + \sum_{m=1, -j}^{P} \phi_m J_{jm})
ϕj=σ(i=1∑Dviwij+m=1,−j∑PϕmJjm)
由于
ϕ
j
\phi_j
ϕj用于表示每一个维度的数据,所以我们可以使用
ϕ
=
{
ϕ
j
}
j
=
1
P
\phi = \{\phi_j\}_{j=1}^{P}
ϕ={ϕj}j=1P通过坐标上升的方法进行求解。